当前位置:网站首页>ROS机器人学习——麦克纳姆轮运动学解算
ROS机器人学习——麦克纳姆轮运动学解算
2022-04-22 13:01:00 【范子琦】
麦克纳姆轮运动学解算
一、麦克纳姆轮介绍
了解过Robomaster的同学都知道,RM战车所用的轮子均为麦克纳姆轮,这种轮子安装方式与普通轮子无异,可安装于平行轴上,但是麦克纳姆轮可以实现全向移动,即前后运动、水平移动、绕中心自转。正因为以上优点,许多工业上的全向移动平台都会应用这种轮子。缺点也有,就是不耐磨,需要定期更换。
麦克纳姆轮由两部分组成:轮毂和辊子,轮毂为轮子的主体,辊子为轮毂周围的类似椭球体的小轮子,轮毂和辊子都有自己的轴,且轮毂轴与辊子轴夹角为45°(可以为其他角度但45°角最为常见)

麦轮的安装方式也有讲究,虽然都是同轴安装,但与普通轮子不同,麦轮分为左旋和右旋两种,在一个四轮底盘上需要用两个左旋和两个右旋。安装方式为O型,如图所示:

左图为安装后你看到的样子,右图为四个轮子与地面接触的辊子围成的形状,也就是“O形”
这里的O形指的是与地面接触的辊子围成的形状噢,不要再问为什么左图看起来是个X了
二、麦克纳姆轮运动学模型
1. 基础知识
1.1 坐标系统
在ROS机器人中,坐标系统使用右手定义

对于ROS机器人,如果以它为坐标系的原点,那么
- x轴:前方
- y轴:左方
- z轴:上方
如图所示:

除此之外,对于旋转运动,也使用右手定义:
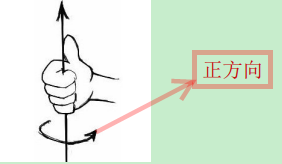
根据右手定义,围绕 z轴正旋转 是 逆时针旋转
1.2 测量单位
ROS使用公制 :
- 线速度:
m/s - 角速度:
rad/s
1.3 轮子序号定义
左前1 右前2
左后3 右后4
2. 逆运动学解析
逆运动学模型(inverse kinematic model)得到的公式可以根据底盘的运动状态解算出四个轮子的速度。
2.1 底盘运动的分解
刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。底盘的运动也可以分解为三个量:
如下图所示:
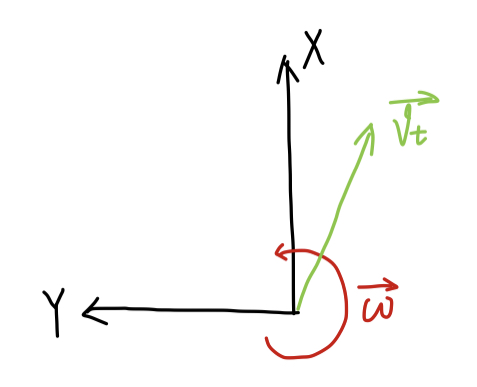
- v t x v_{tx} vtx 表示 X 轴运动的速度,即前后方向,定义向前为正;
- v t y v_{ty} vty 表示 Y 轴运动的速度,即左右方向,定义向左为正;
- ω → \overrightarrow{\omega} ω 表示 yaw 轴自转的角速度,定义逆时针为正。
2.2 计算轮子轴心位置的速度
如下图所示,以右前轮为例,蓝色的方框代表轮子,定义以下变量:
- r → \overrightarrow{r} r为从底盘中心指向轮子轴心的矢量;
- v → \overrightarrow{v} v为轮子轴心的速度矢量;
- v r → \overrightarrow{v_r} vr为轮子轴心沿垂直于 r → \overrightarrow{r} r的方向(即切线方向)的速度分量;

可以计算出:
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ \overrightarro…
将 r → \overrightarrow{r} r分解为 r x r_x rx和 r y r_y ry,分别计算轮子轴心在X、Y轴的速度分量:
{ v x = v t x + ω ⋅ r y v y = v t y + ω ⋅ r x \left\{\begin{matrix} v_x=v_{tx}+\omega\cdot{r_y} \\ v_y=v_{ty}+\omega\cdot{r_x} \end{matrix}\right. { vx=vtx+ω⋅ryvy=vty+ω⋅rx
其他三个轮子同理
2.3计算与地面接触的辊子速度
由2.2算得的轮子轴心速度,可以分解为沿辊子轴方向的 v ∥ → \overrightarrow{v_\parallel} v∥ 和垂直辊子轴方向的 v ⊥ → \overrightarrow{v_\perp} v⊥ ,如图所示

其中 v ⊥ → \overrightarrow{v_\perp} v⊥用于让辊子空转,可以忽略
定义一个沿辊子方向的单位矢量 e ^ \hat{e} e^,对于右前轮来说, e ^ = 1 2 ⋅ i ^ + 1 2 ⋅ j ^ \hat{e}=\frac{1}{\sqrt{2}}\cdot\hat{i}+\frac{1}{\sqrt{2}}\cdot\hat{j} e^=21⋅i^+21⋅j^
则沿轴线的速度为 v → \overrightarrow{v} v在 e ^ \hat{e} e^方向的投影:
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ \overrightarr…
2.4 计算轮子的转速(和地面接触点的线速度)
如图所示,轮子转速为 v w v_w vw

由于辊子与轮轴呈45°角,则 v ω v_\omega vω可求得:
KaTeX parse error: No such environment: align* at position 8: \begin{̲a̲l̲i̲g̲n̲*̲}̲ v_w&=\frac{v_…
将2.2求出的 { v x = v t x + ω ⋅ r y v y = v t y + ω ⋅ r x \left\{\begin{matrix} v_x=v_{tx}+\omega\cdot{r_y} \\ v_y=v_{ty}+\omega\cdot{r_x} \end{matrix}\right. {
vx=vtx+ω⋅ryvy=vty+ω⋅rx带入上式,可求出此轮的转速:
v w = v t x + v t y + ω ( r x + r y ) v_w=v_{tx}+v_{ty}+\omega(r_x+r_y) vw=vtx+vty+ω(rx+ry)
结合以上四个步骤,可以根据底盘运动状态解算出四个轮子的转速:
{ v w 1 = v t x − v t y − ω ( r x + r y ) v w 2 = v t x + v t y + ω ( r x + r y ) v w 3 = v t x + v t y − ω ( r x + r y ) v w 4 = v t x − v t y + ω ( r x + r y ) \left\{\begin{matrix} v_{w1}=v_{tx}-v_{ty}-\omega(r_x+r_y)\\ v_{w2}=v_{tx}+v_{ty}+\omega(r_x+r_y)\\ v_{w3}=v_{tx}+v_{ty}-\omega(r_x+r_y)\\ v_{w4}=v_{tx}-v_{ty}+\omega(r_x+r_y) \end{matrix}\right. ⎩⎪⎪⎨⎪⎪⎧vw1=vtx−vty−ω(rx+ry)vw2=vtx+vty+ω(rx+ry)vw3=vtx+vty−ω(rx+ry)vw4=vtx−vty+ω(rx+ry)
以上方程组就是O形麦轮底盘的逆运动学模型。
2.5 代码实现
//参数宏定义
#define ENCODER_RESOLUTION 1440.0 //编码器分辨率, 轮子转一圈,编码器产生的脉冲数
#define WHEEL_DIAMETER 0.058 //轮子直径,单位:米
#define D_X 0.18 //底盘Y轴上两轮中心的间距
#define D_Y 0.25 //底盘X轴上两轮中心的间距
#define PID_RATE 50 //PID调节PWM值的频率
double pulse_per_meter = 0;
float rx_plus_ry_cali = 0.3;
double angular_correction_factor = 1.0;
double linear_correction_factor = 1.0;
double angular_correction_factor = 1.0;
/** * @函数作用:运动学解析参数初始化 */
void Kinematics_Init(void)
{
//轮子转动一圈,移动的距离为轮子的周长WHEEL_DIAMETER*3.1415926,编码器产生的脉冲信号为ENCODER_RESOLUTION。则电机编码器转一圈产生的脉冲信号除以轮子周长可得轮子前进1m的距离所对应编码器计数的变化
pulse_per_meter = (float)(ENCODER_RESOLUTION/(WHEEL_DIAMETER*3.1415926))/linear_correction_factor;
float r_x = D_X/2;
float r_y = D_Y/2;
rx_plus_ry_cali = (r_x + r_y)/angular_correction_factor;
}
/** * @函数作用:逆向运动学解析,底盘三轴速度-->轮子速度 * @输入:机器人三轴速度 m/s * @输出:电机应达到的目标速度(一个PID控制周期内,电机编码器计数值的变化) */
void Kinematics_Inverse(int16_t* input, int16_t* output)
{
float v_tx = (float)input[0];
float v_ty = (float)input[1];
float omega = (float)input[2];
static float v_w[4] = {
0};
v_w[0] = v_tx - v_ty - (r_x + r_y)*omega;
v_w[1] = v_tx + v_ty + (r_x + r_y)*omega;
v_w[2] = v_tx + v_ty - (r_x + r_y)*omega;
v_w[3] = v_tx - v_ty + (r_x + r_y)*omega;
//计算一个PID控制周期内,电机编码器计数值的变化
output[0] = (int16_t)(v_w[0] * pulse_per_meter/PID_RATE);
output[1] = (int16_t)(v_w[1] * pulse_per_meter/PID_RATE);
output[2] = (int16_t)(v_w[2] * pulse_per_meter/PID_RATE);
output[3] = (int16_t)(v_w[3] * pulse_per_meter/PID_RATE);
}
3. 正运动学解析
3.1 正运动学模型
正运动学模型(forward kinematic model)让我们可以通过四个轮子的速度,计算出底盘的运动状态。可以直接根据逆运动学模型中的三个方程解出来,比如:
{ v t x = v 4 + v 3 2 v t y = v 3 − v 1 2 ω = v 2 − v 3 2 ( r x + r y ) \left\{\begin{matrix} v_{tx}=\frac{v_4+v_3}{2}\\ v_{ty}=\frac{v_3-v_1}{2}\\ \omega=\frac{v_2-v_3}{2(r_x+r_y)} \end{matrix}\right. ⎩⎨⎧vtx=2v4+v3vty=2v3−v1ω=2(rx+ry)v2−v3
转换为底盘坐标系下对时间求积分即为里程计变化量
3.2 代码实现
//参数宏定义
#define ENCODER_MAX 32767
#define ENCODER_MIN -32768
#define ENCODER_LOW_WRAP ((ENCODER_MAX - ENCODER_MIN)*0.3+ENCODER_MIN)
#define ENCODER_HIGH_WRAP ((ENCODER_MAX - ENCODER_MIN)*0.7+ENCODER_MIN)
#define PI 3.1415926
//变量定义
int32_t wheel_turns[4] = {
0};
int32_t encoder_sum_current[4] = {
0};
/** * @函数功能:正向运动学解析,轮子编码值->底盘三轴里程计坐标 * @输入:编码器累加值 * @输出:三轴里程计 x y yaw */
void Kinematics_Forward(int16_t* input, int16_t* output)
{
static double dv_w_times_dt[4]; //轮子瞬时变化量dxw=dvw*dt
static double dv_t_times_dt[3]; //底盘瞬时变化量dxt=dvt*dt
static int16_t encoder_sum[4];
//将左面轮子编码器累加值乘以-1,以计算前进的距离
encoder_sum[0] = -input[0];
encoder_sum[1] = input[1];
encoder_sum[2] = -input[2];
encoder_sum[3] = input[3];
//编码器计数溢出处理
for(int i=0;i<4;i++)
{
if(encoder_sum[i] < ENCODER_LOW_WRAP && encoder_sum_current[i] > ENCODER_HIGH_WRAP)
wheel_turns[i]++;
else if(encoder_sum[i] > ENCODER_HIGH_WRAP && encoder_sum_current[i] < ENCODER_LOW_WRAP)
wheel_turns[i]--;
else
wheel_turns[i]=0;
}
//将编码器数值转化为前进的距离,单位m
for(int i=0;i<4;i++)
{
dv_w_times_dt[i] = 1.0*(encoder_sum[i] + wheel_turns[i]*(ENCODER_MAX-ENCODER_MIN)-encoder_sum_current[i])/pulse_per_meter;
encoder_sum_current[i] = encoder_sum[i];
}
//要计算坐标所以变回来
dv_w_times_dt[0] = -dv_w_times_dt[0];
dv_w_times_dt[1] = dv_w_times_dt[1];
dv_w_times_dt[2] = -dv_w_times_dt[2];
dv_w_times_dt[3] = dv_w_times_dt[3];
//计算底盘坐标系(base_link)下x轴、y轴变化距离m与Yaw轴朝向变化rad 一段时间内的变化量
dv_t_times_dt[0] = ( dv_w_times_dt[3] + dv_w_times_dt[2])/2.0;
dv_t_times_dt[1] = ( dv_w_times_dt[2] - dv_w_times_dt[0])/2.0;
dv_t_times_dt[2] = ( dv_w_times_dt[1] - dv_w_times_dt[2])/(2*wheel_track_cali);
//积分计算里程计坐标系(odom_frame)下的机器人X,Y,Yaw轴坐标
//dx = ( vx*cos(theta) - vy*sin(theta) )*dt
//dy = ( vx*sin(theta) + vy*cos(theta) )*dt
output[0] += (int16_t)(cos((double)output[2])*dv_t_times_dt[0] - sin((double)output[2])*dv_t_times_dt[1]);
output[1] += (int16_t)(sin((double)output[2])*dv_t_times_dt[0] + cos((double)output[2])*dv_t_times_dt[1]);
output[2] += (int16_t)(dv_t_times_dt[2]*1000);
//Yaw轴坐标变化范围控制-2Π -> 2Π
if(output[2] > PI)
output[2] -= 2*PI;
else if(output[2] < -PI)
output[2] += 2*PI;
//发送机器人X轴y轴Yaw轴瞬时变化量,在ROS端除以时间
output[3] = (int16_t)(dv_t_times_dt[0]);
output[4] = (int16_t)(dv_t_times_dt[1]);
output[5] = (int16_t)(dv_t_times_dt[2]);
}
参考文献:
【1】https://zhuanlan.zhihu.com/p/20282234
【2】https://blog.csdn.net/shixiaolu63/article/details/78496457
版权声明
本文为[范子琦]所创,转载请带上原文链接,感谢
https://blog.csdn.net/oXiaoLingTong/article/details/120198677
边栏推荐
- Is the securities account of qiniu app legal? Is it safe for novices to open an account here
- redis更新值而不更新时间
- The R language uses the qnorm function to generate the positive distribution quantile function data, and uses the plot function to visualize the positive distribution quantile function data (normal di
- Calloc and realloc
- R语言使用merge函数对两个dataframe数据进行左连接(Left join)
- Leetcode 1678. Design goal parser
- redis的key都变成了backup,值也都不见了,这是为什么呢?
- 396. Rotation function
- One sentence of code prints out the data of the mat object of OpenCV
- CMD命令与脚本学习笔记_Kali_B站
猜你喜欢









随机推荐
R语言使用qlogis函数生成Logistic分布分位数函数数据、使用plot函数可视化Logistic分布分位数函数数据(Logistic Distribution)
The importance of the production cost of promotional films of scientific and technological products!
JS foundation 11
11. Container with the most water
IDE導入項目
Day code 300 lines learning notes day 47
Shopping form making
Excel string splicing
ROS2——什么是接口
The R language uses the rowsums function to calculate the row data sum value of all data rows in the dataframe
396. Rotation function
IDE导入项目
The keys of redis have become backup and the values have disappeared. Why?
Redis advantages and disadvantages usage scenarios
ROS机器人学习——TF坐标变换
CMD命令与脚本学习笔记_Kali_B站
Sprintf format string
如何实现数组和 List 之间的转换?
NoSQL survey Part3: open source failure
String intensive training - copy string | string inversion implementation