当前位置:网站首页>Research on swarm intelligence collaborative work and cognitive computing technology
Research on swarm intelligence collaborative work and cognitive computing technology
2022-04-23 00:29:00 【Zhuo Qing】

Hello everyone , I'm the third person in charge of the project , Chao Qing . Representative topic 3 , Participants in the research of swarm intelligence collaborative operation and cognitive computing technology present to experts Report the relevant contents of Topic 3 . The main participants of Topic 3 include : Tsinghua University , Heilongjiang devo Technology Development Co., Ltd .

The content of the project will be reported in the following five parts .

Firstly, it introduces the background and main research contents of the project .

project 《 Swarm intelligence, autonomous operation, smart farm 》 Based on the current situation of agriculture in China , Implement the strategy of precision agriculture . Aiming at many difficulties in modern agricultural industry , Apply a new generation of artificial intelligence technology , Meet the needs of upgrading the agricultural industry .
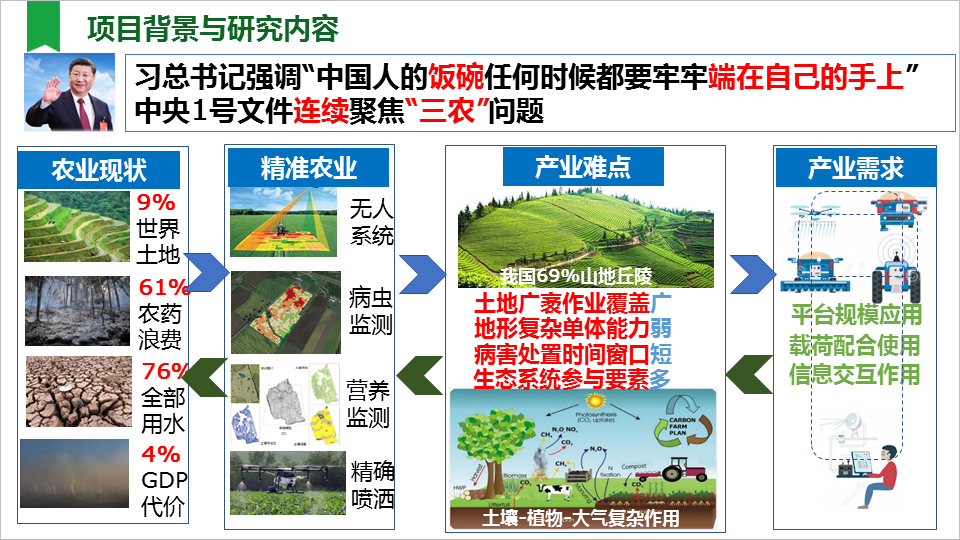
The research content of swarm intelligence cooperative operation and cognitive computing in topic 3 includes three technologies : 1) Based on the characteristics of agricultural operations , That is, under the non structural complex farmland environment , Autonomous decision-making and task allocation of agricultural machinery 、 Man machine integration technology ; 2) Efficient and reliable on-site wireless real-time communication and embedded edge cloud computing platform technology ; 3) In the process of cultivation, there are many ways to manage the harvest 、 Autonomous driving of multiple sets of agricultural machinery and efficient cooperative operation technology of formation ;

Combine the specific crop varieties produced by smart farm : Wheat 、 Practical solutions proposed in corn and rice production : (1) Autonomous decision-making and task allocation in swarm intelligence ; Formation motion control based on reinforcement learning ; (2) Complete the technical breakthrough in man-machine cooperation based on intention recognition ; Develop an embedded computing platform to meet the project demonstration and verification , Realize on-site real-time wireless networking and intelligent decision planning algorithm ; (3) Finally, the agricultural machinery group in all links of farming, management and collection will work together efficiently and intelligently in the whole production process ;

It shows the relationship between Topic 3 and other topics , And the internal main research content structure . Task 4 assigns cluster tasks to task 3 ; Topic 3 is on the self-developed real-time communication and edge computing platform , Complete the internal independent decision-making algorithm , Achieve site formation control , Real time feedback between man and machine is realized through man-machine cooperation interface . The specific real-time instruction is sent to the agricultural machinery interface in task 2 . Cooperate with the overall completion of agricultural intellectualization 、 Preparation of industry standards for autonomous and unmanned operation .

(2) Main technical routes and technological innovation .

In terms of autonomous decision-making and task allocation of agricultural machinery groups , Aiming at the complex dynamic environment of farmland operation , Use the knowledge base established by other topics of the project , Design and develop autonomous decision-making and task allocation algorithms . Mainly based on evolutionary game algorithm 、 Bionic cluster decision algorithm and swarm intelligence optimization algorithm realize group task allocation and scheduling .

In the agricultural machinery group formation In terms of cooperation with . On the one hand, the travel characteristics of different agricultural machinery are very different , On the other hand, farmland sites have certain characteristics of uncertainty and unstructured . Use reinforcement learning , Realize the optimization of formation control parameters and strategies , And real-time control .

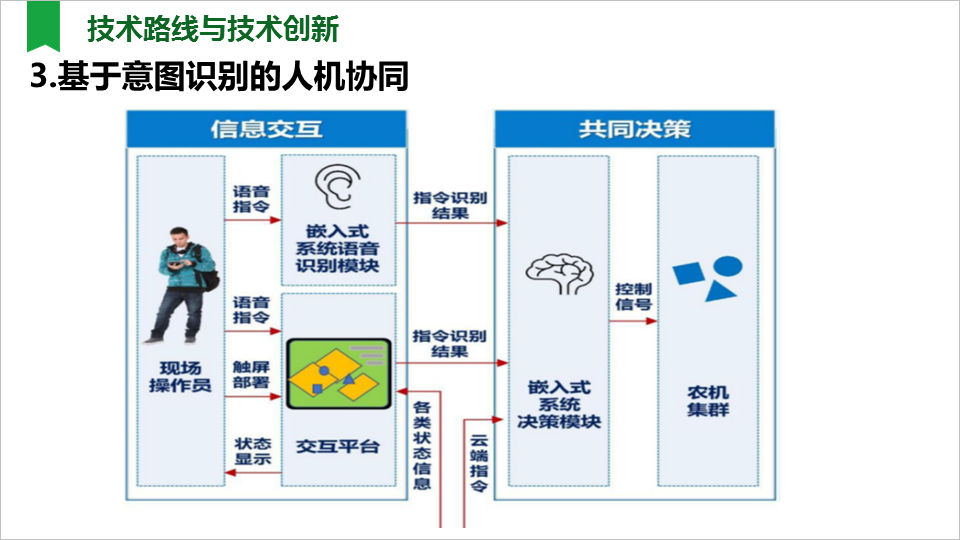
Human computer interaction is to complete all stages of intelligent field operation of agricultural machinery group , You know 、 controllable 、 An important guarantee of analyzability . Determine the safe and reliable boundary conditions of unmanned system . On the one hand, the operation monitoring personnel can understand the operation status of agricultural machinery through handheld or wearing electronic equipment ; On the other hand, use sound 、 Images 、 Gesture recognition technology completes the human-computer cooperation of intention recognition .
Aiming at the operation task and environment of farm tools on site , Develop a wireless network that can be used on site 、 Hardware platform for embedded computing . Complete the calculation of autonomous planning tasks , And send the real-time control command to the lower machine control unit of agricultural machinery , And complete the collection of job information and operation status .

The main innovations of the project include two aspects : 1) A dual drive strategy based on big data and knowledge map is proposed , Combining artificial intelligence means such as bionics and intensive training , A method for realizing the collaborative operation planning of heterogeneous agricultural machines and tools and swarm agent ; 2) Propose and implement Including man-machine integration and cooperation 、 Dynamic formation of agricultural machinery with large-scale real-time communication and embedded computing 、 Collaborative work mode ;

(3) Research team and work foundation

The lead unit of Topic 3 , Tsinghua University relies on the Institute of navigation and control, Department of automation, Tsinghua University . It is mainly based on the core technology of intelligent unmanned system , In UAV 、 Unmanned vehicle 、 Space robots 、 Underwater Unmanned system has undertaken and completed a number of national projects 、 Ministry of Science and Technology 、 Scientific research projects such as NSFC ; Participant: Heilongjiang zhiwo Technology Development Co., Ltd , It is a national high-tech enterprise specializing in building high-end agricultural machinery and agricultural services . Has a number of patented technologies , Won many scientific and Technological Awards .

Here are some on-site scientific research projects of participating units , And related agricultural machines and tools .

In terms of previous technology accumulation , The communication networking system of high dynamic UAV group is realized , It can meet the on-site communication requirements of group agricultural machinery ; The distributed cooperative control in biological population is proposed and verified And optimization mechanism , And realized a variety of unmanned and mission planning Algorithms related to collaborative control .

In the task application 、 During startup , Carried out paddy field research together with other subjects of the project 、 Liu Sheng's research on the standardized operation of dryland agricultural machinery is to sort out ; The autonomous operation scheme of agricultural machinery group demonstrated by the overall project is determined ;

The demonstration base for the application of the subject achievements was investigated on site : 290 Farm site network 、 Power and farmland facilities .

(4) Project schedule and assessment method

This table gives three years , Schedule by quarter . Topic 3 is carried out in parallel according to three main lines ; The first one is about the simulation of agricultural machinery cooperative operation algorithm Design and verification platform ; The second is the verification design and finalization of the computing hardware platform to realize swarm intelligent control ; The third is the report generated from the summary of relevant technologies in the development process 、 The paper 、 patent 、 Industry norms and talent training . Finally, cooperate with the project to complete the system integration and application demonstration .
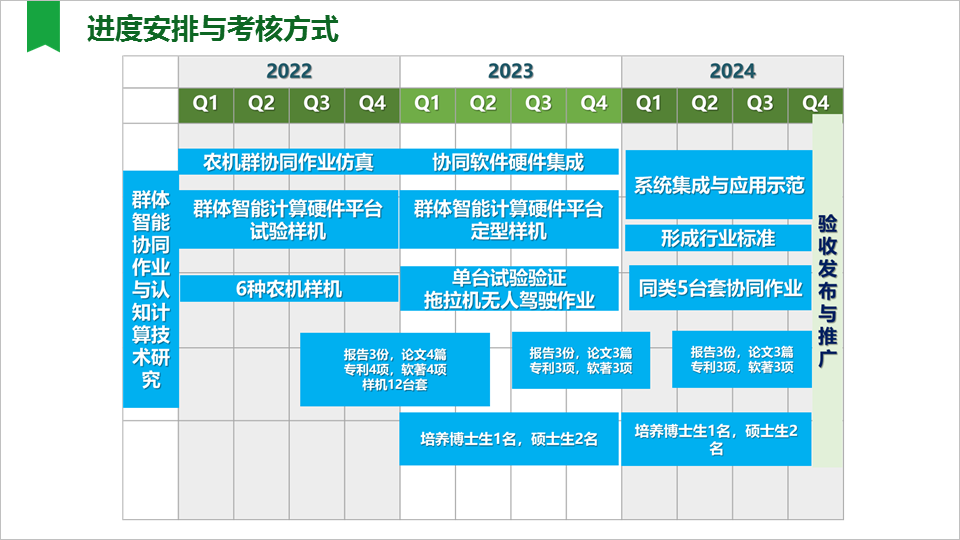
About the assessment method of the project, the contents of each part are concentrated in this form .

(5) Project budget and expected results

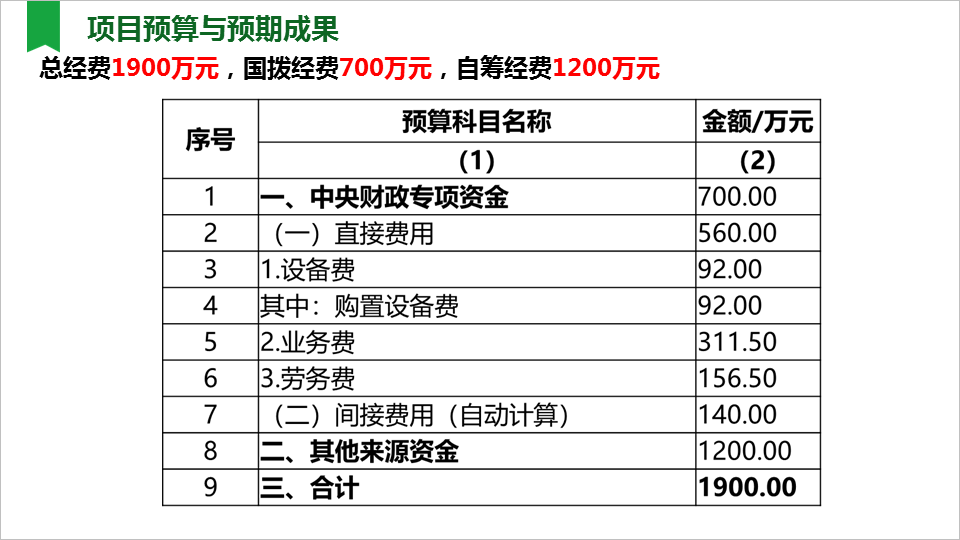
This table shows the total funds of the project and the budget allocation plan .
The expected results include three aspects : The first aspect is the algorithm software and hardware platform of swarm intelligence ; The second part is the realization of system integration and demonstration , Including independent decision-making of more than three kinds of unmanned agricultural machinery And task assignment ; Realization 5 Above the platform set, feel the same link, independent formation and cooperative operation ; The third part is related papers 、 patent 、 Soft content . Finally, three items of agricultural intellectualization will be formed 、 Independent and unmanned industry standards .

The above is my report , Please comment and correct by all experts .

版权声明
本文为[Zhuo Qing]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230025208016.html
边栏推荐
- Progrès de la recherche sur la télédétection des paramètres phénologiques de la végétation
- Making 3D remote sensing image map with ArcGIS
- 群体智能协同作业与认知计算技术研究
- (转)Matlab R2014a 64位与Visual Studio2015的mex相关问题
- (turn) how is word2016 compatible with MathType
- Linear basis (various templates + examples)
- (轉)使用dotTrace6.0進行性能,內存分析
- ArcGIS 城市生活区用地适宜性评价(一)
- TiDB 在连锁快餐企业丨海量交易与实时分析的应用探索
- [classification de l'image] - Venez et séchez ce bol d'efficientnet
猜你喜欢
Research Progress on remote sensing of vegetation phenological parameters (good article sharing)

Componentwillunmount uninstall components

倍福scope view示波器读取组态IO的信号

Analytic hierarchy process software operation steps (Yaahp)

【征文大赛】TiDB 社区专栏第一届征文大赛,快来一次性集齐所有周边吧!

JVM performance tuning 1

(transfer) Aspose Word programming guide DOM tree recognition, the relationship between each layer structure

ArcMap uses drawing tools to add annotations

MySQL built-in function

Linear basis (various templates + examples)
随机推荐
Making 3D remote sensing image map with ArcGIS
三菱FX5U配置MR-JE-C伺服驱动器 IEBasic设定
(transfer) SSH login configuration and file transfer
The global style caused by sideeffects disappears
Generation and mutual conversion of ArcGIS tin ground surface and grid ground surface
(轉)使用dotTrace6.0進行性能,內存分析
Static and dynamic control nixie tube
三菱MR-JE-C伺服应用详细介绍
将 AWS S3 数据迁移至 TiDB Cloud 集群
[play with lighthouse] build a temporary mailbox system that can be collected and destroyed immediately
ArcMap uses drawing tools to add annotations
从零开始学安卓(kotlin)八——线程、Service
(turn) how is word2016 compatible with MathType
Differences of lake water color, water environment and hydrological remote sensing
2022年4月22日,第15天
ArcGIS 制作3D遥感影像图
Mitsubishi fx5u configures iebasic setting of mr-je-c servo driver
(转)WinSCP(SSH的FTP客户端)如何生成密钥登陆linu
API post, the interface document generation tool, is amazing
(transfer) Aspose Working with document in words Programming Guide