当前位置:网站首页>【论文阅读】LIME:Low-light Image Enhancement via Illumination Map Estimation(笔记最全篇)
【论文阅读】LIME:Low-light Image Enhancement via Illumination Map Estimation(笔记最全篇)
2022-08-09 14:56:00 【Florrie Zhu】
文章目录
今天要整理的一篇论文是使用传统的方法解决低照度的问题,Guo等人于2016年发表在IEEE上,论文《LIME:Low-light Image Enhancement via Illumination Map Estimation》,DOI:10.1109/TIP.2016.2639450
Abstract
在低照度环境下拍摄的图像通常能见度都很低,这些图像除了在视觉效果上降低了美感以外,还让计算机视觉的显示效果降质了。为了解决这个问题,本文提出了一种简单有效的低照度图像增强算法(Low-light Image Enhancement,LIME)。具体来说,输入一张低照度图像,选取每个像素通道中的最大值初始化该图像光照图,然后通过强加入一种结构先验来细化这个初始光照图,最后根据Retinex理论合成增强图。实验表明,该算法较之前的方法在质量和性能上都取得不错的效果。
Introduction
能见度高的图像能反映出场景中清晰的细节,这对于一些采用视觉技术的工作有很大的影响,如物体检测和追踪等。但是,在低照度的环境下捕获的图像通常是低能见度,虽然目前有很多算法能提升图像亮度,但是过度提亮会有损图像的效果。直接放大低照度图像可能是调节暗区可见性最直观和最简单的方法,但此操作也会带来另一个问题,比如相对较亮的区域可能已经饱和,因此丢失了相应的细节。
直方图均衡化(HE) 策略是一种将原图像通过某种变换,得到一幅灰度直方图为均匀分布的新图像的方法,可以避免上面的问题。它的基本思想是对在图像中像素个数多的灰度级进行展宽,而对像素个数少的灰度级进行缩减(将像素灰度级范围规定在0-1),从而达到清晰图像的目的。直方图均衡化的核心是变换函数,而常用的变换函数有线性变换、分段线性变换、伽马校正,对数变换、幂变换等。在文中主要指出伽马校正的缺点:仅对每个像素进行操作,忽略了像素之间的相邻关系。
Retinex理论的理论依据依赖一个核心假设:(彩色)图像可以被分解成入射分量(光照)和反射分量两个主要成分,表达式如下:
I = T ⋅ R (1) \begin{aligned}I=T\cdot R \tag1\end{aligned} I=T⋅R(1)
其中 I I I是原始低照度图,T是入射分量即光照,R是反射分量。最早基于Retinex理论的研究有SSR、MSR:它们都是把反射分量作为最后的增强结果,因此,只需要求解出入射分量即可。但是这样的处理方式,得到的结果通常是不自然的,且容易过度增强。往后的研究就偏向于优化入射分量,使其更自然,有通过融合多张图像来调整光照图,也有通过划分子块优化光照图等。最后来,研究的方向就偏向于加入权重模型,同时优化光照图和反射分量。
到这里,值得一提的方法是:Dong发现了反转低照度图像跟有雾图像的特征相似,因此提出了反转图像(作为伪雾图)应用去雾算法,同样能得到增强亮度的效果,这就将低照度增强领域扩展至图像去雾领域中去了,去雾算法可用在低照度增强中去。(对这个算法感兴趣的同学,可以去下载文章看看,这里提供论文DOI:10.1145/1836845.1836920)

(图)伪雾图与有雾图像
Contribution
本文提出的算法也是基于Retinex理论的,算法主要倾向于估计低照度图像的光照图来实现增强。这里值得注意的是,本文的算法跟以往的基于Retinex增强方法(直接将图像分解成L和R)不同,我们的算法是仅仅估计一种一个变量(光照),这大大地缩小解空间和减少计算量。本文的主要贡献是:
- 提出了两种加速优化光照图的算法:增广拉格朗日乘数法(ALM)和权重策略。
- 进行了大量的对比实验。
个人观点: 该文章最大的贡献其实是提出的第一种加速优化方法,他主要将优化光照的问题嵌入到最优化问题中,考虑图像的保真和结构性,自定义了一个优化的目标函数和相应的约束条件,然后采用传统的拉格朗日乘数法来解决这个优化问题。
Method
根据Retinex理论可知,我们理想的图像是R(入射分量)可以通过估计出光照图T和原始的低照度 I I I得到:
R = I T \begin{aligned}R=\frac IT \end{aligned} R=TI
为了简化计算,通常认为三通道(彩色)图像都是共享同一个光照图。首先初始化光照图 T T T:
T c ( x ) = max c ∈ { R , G , B } I c ( x ) (2) \begin{aligned}T^c(x)=\max_{c\in\{R,G,B\}}I^c(x) \tag2\end{aligned} Tc(x)=c∈{ R,G,B}maxIc(x)(2)
要保证这个的光照图不会使得增强的图像过于饱和,我们加入了一个非常小的参数 ϵ \epsilon ϵ来限制:
R ( x ) = I ( x ) T ( x ) + ϵ (3) \begin{aligned}R(x)=\frac {I(x)}{T(x)+\epsilon} \tag3\end{aligned} R(x)=T(x)+ϵI(x)(3)
ϵ \epsilon ϵ是一个非常小的常量,主要是为了避免出现除零和R过度饱和的情况。文章明确地指出这项工作的目标是:非均匀地增强弱光图像的照明,而不是消除光源引起的色移。
在文中,作者还特意与Dong提出的反转图像去雾增强算法作对比。我觉得这里的工作整理得挺好的,这里帮助我更好地理解了基于大气物理散射模型的去雾算法和基于Retinex理论增强算法之间能融合及相似的地方。所以,我在整理这篇文章的笔记的时候,还是决定把这部分写上。
Dong使用反转低照度图像 ( 1 − I ) (1-I) (1−I)作为伪雾图,使用大气散射模型(4)来实现增强:
1 − I = ( 1 − R ) ⋅ T + α ( 1 − T ) (4) \begin{aligned}1-I=(1-R)\cdot T+\alpha(1-T) \tag4\end{aligned} 1−I=(1−R)⋅T+α(1−T)(4)
在大气物理模型(4)理论中,T代表透射率,需要估计的, α \alpha α代表大气光强,是一个确定的常量。而(1-I)代表伪雾图,(1-R)代表去雾后的图像,即增强的图像。
式子(4)和(1)进行对比,其实有一定的相似性,它们之间存在一种关系。这需要引入著名的何凯明博士提出的暗通道先验理论(Dark Channel Prior,DCP),即 I d a r k = min c I c I^{dark}=\min_cI^c Idark=mincIc,清晰无雾图的暗通道为0,使用暗通道先验理论来估计透射率,有:
T ′ ( x ) ← 1 − min c 1 − I c ( x ) α = 1 − 1 α + max c I c ( x ) α (5) \begin{aligned} T'(x) \gets 1-\min_c\frac{1-I^c(x)}{\alpha}=1-\frac1\alpha+\max_c\frac{I^c(x)}{\alpha} \tag5\end{aligned} T′(x)←1−cminα1−Ic(x)=1−α1+cmaxαIc(x)(5)
把(5)代入到(4)中,得到:
R ( x ) = I ( x ) − 1 + α ( 1 − 1 α + max c I c ( x ) α + ϵ ) + ( 1 − α ) (6) \begin{aligned} R(x)=\frac{I(x)-1+\alpha}{(1-\frac1\alpha+\max_c\frac{I^c(x)}{\alpha}+\epsilon)}+(1-\alpha) \tag6\end{aligned} R(x)=(1−α1+maxcαIc(x)+ϵ)I(x)−1+α+(1−α)(6)
当 α = 1 \alpha=1 α=1时,我们可以看到,(3)和(6)的结果是一样的;但是当 α \alpha α远离1,模型(3)和(6)的等价关系就不存在了。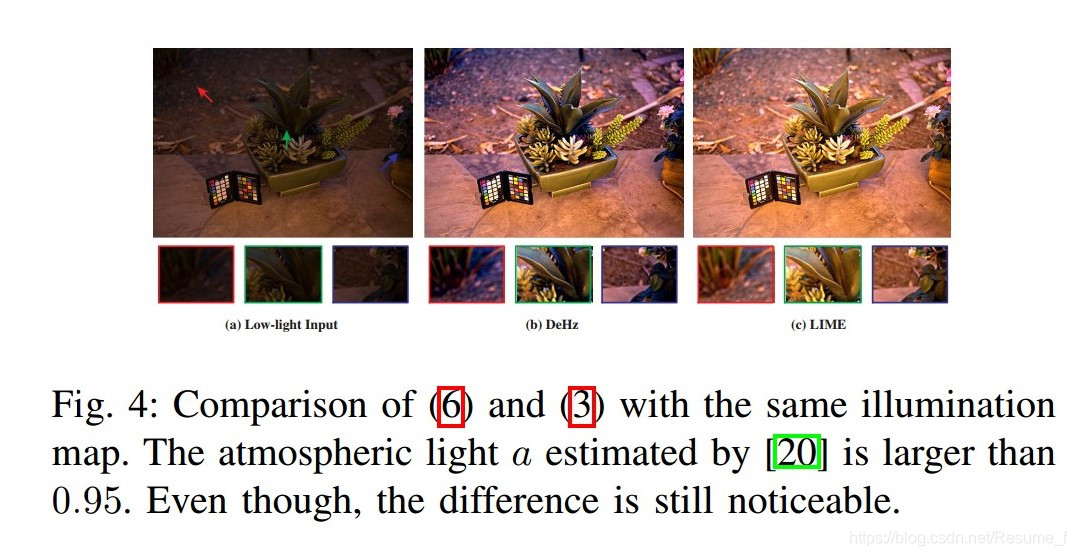
这个图展示了(3)和(6)两个模型的结果,虽然将大气光强设置成0.95,两个模型的效果仍然是非常明显的。本文主要是使用(3)的方式来获取增强图。经(2)获得初始化的光照图,然后使用两种不同的方法优化光照图,下面开始介绍文中的两种加速算法。
Speed-up Method(1):ALM
ALM加速法,是将优化光照的问题归纳为最优化问题中,考虑图像的保真度和结构平滑度,自定义了一个优化的目标函数,使用F范数和L1正则分别衡量图像的保真度和结构平滑度:
min T ∣ ∣ T ′ − T ∣ ∣ F 2 + k ∣ ∣ W ⋅ ▽ T ∣ ∣ 1 (7) \begin{aligned} \min_T||T'-T||^2_F+k||W\cdot \triangledown T||_1 \tag7\end{aligned} Tmin∣∣T′−T∣∣F2+k∣∣W⋅▽T∣∣1(7)
这里的k是平衡F范数和L1正则的系数。(7)式的前项为F范数,考虑的是细化后的光照图L‘与初始化的光照图L之间的保真度,后项为L1正则,考虑的是平滑度,W为权重矩阵, ▽ T \triangledown T ▽T代表一阶导数滤波器,包括水平和垂直方向的。
传统上,可以通过交替方向乘子算法(ADMM)就能有效地解决问题(8)。 但从(8)中的目标可以看出,两个约束项都涉及T。这里引入了一个辅助变量G来代替 ▽ T \triangledown T ▽T,以使问题可分离并因此易于解决。把 G = ▽ T G=\triangledown T G=▽T作为一项等式约束条件,最后我们的优化问题就等价于:
min T , G ∣ ∣ T ′ − T ∣ ∣ F 2 + k ∣ ∣ W ⋅ G ∣ ∣ 1 s . t . ▽ T = G (8) \begin{aligned} \min_{T,G}||T'-T||^2_F+k||W\cdot G||_1\\ s.t.\;\triangledown T=G \tag8\end{aligned} T,Gmin∣∣T′−T∣∣F2+k∣∣W⋅G∣∣1s.t.▽T=G(8)
根据优化问题的条件(关于优化问题,我也有整理,详情请看博文:梳理凸优化问题),这属于典型的带有等式约束优化,可使用增广拉格朗日函数(Augmented Lagrangain Method)来求解。根据定义,给约束项加上一个惩罚项,构造增广拉格朗日函数:
L = ∣ ∣ T ′ − T ∣ ∣ F 2 + k ∣ ∣ W ⋅ G ∣ ∣ 1 + ϕ ( Z , ▽ T − G ) (9) \begin{aligned} L=||T'-T||^2_F+k||W\cdot G||_1+\phi(Z,\triangledown T-G) \tag9\end{aligned} L=∣∣T′−T∣∣F2+k∣∣W⋅G∣∣1+ϕ(Z,▽T−G)(9)
其中 ϕ ( Z , ▽ T − G ) = μ 2 ∣ ∣ ▽ T − G ∣ ∣ F 2 + < Z , ▽ T − G > \phi(Z,\triangledown T-G)=\frac \mu2||\triangledown T-G||^2_F+<Z,\triangledown T-G> ϕ(Z,▽T−G)=2μ∣∣▽T−G∣∣F2+<Z,▽T−G>,这里的<,>是指矩阵的内积,Z代表拉格朗日乘子。因为函数有三个变量:T、G、Z需要求解,这篇文章的作者采用分解子问题,分别使用ALM求解。
子问题 T
将函数(9)中有关T的部分抽离出来,单独优化:
T ( t + 1 ) ← arg min T ∣ ∣ T ′ − T ∣ ∣ F 2 + ϕ ( Z ( t ) , ▽ T − G ( t ) ) (10) \begin{aligned} T^{(t+1)}\gets \argmin_T||T'-T||^2_F+\phi(Z^{(t)},\triangledown T-G^{(t)}) \tag{10}\end{aligned} T(t+1)←Targmin∣∣T′−T∣∣F2+ϕ(Z(t),▽T−G(t))(10)
式(10)是一个经典的最小二乘问题。
补充 最小二乘法问题的步骤:
(未知数>已知数)超定方程: x b = y xb=y xb=y
最小化残差平方和: b ′ = arg min ( ∣ ∣ x b − y ∣ ∣ 2 ) b'=\argmin(||xb-y||^2) b′=argmin(∣∣xb−y∣∣2)
对其进行位符求最值: b ′ = x T y b'=x^Ty b′=xTy
如果矩阵 x T x x^Tx xTx非奇异,则b有唯一解: b ′ = ( x T x ) − 1 x T y b'=(x^Tx)^{-1}x^Ty b′=(xTx)−1xTy
因此T子问题的解决方案,直接对(10)求微分,令其为0,得到:
2 ( T − T ′ ) + μ ( t ) D T ( D T − G ( t ) ) + D T Z ( t ) = 0 ⇒ ( 2 I + μ ( t ) D T D ) = 2 T ′ + μ ( t ) D T ( G ( t ) − Z ( t ) μ ( t ) ) (11) \begin{aligned} &2(T-T')+\mu^{(t)}D^T(DT-G^{(t)})+D^TZ^{(t)}=0\\ \Rightarrow & (2I+\mu^{(t)}D^TD)=2T'+\mu^{(t)}D^T(G^{(t)}-\frac{Z^{(t)}}{\mu^{(t)}}) \tag{11}\end{aligned} ⇒2(T−T′)+μ(t)DT(DT−G(t))+DTZ(t)=0(2I+μ(t)DTD)=2T′+μ(t)DT(G(t)−μ(t)Z(t))(11)
这里的 I I I是指单位矩阵, D D D是具有前向差异的离散梯度算子的托普利兹矩阵(Toeplitz matrice),包含了水平 D h D_h Dh和垂直 D v D_v Dv方向。为方便起见,操作 D X DX DX和 D T X D^TX DTX分别表示reshape( D x Dx Dx) 和reshape( D T x D^Tx DTx),其中 x x x是矢量化的 X X X,reshape()表示将矢量整形为其矩阵形式的操作。 直接计算 2 I + μ ( t ) D T D 2I + \mu(t)D^TD 2I+μ(t)DTD的倒数是解决子问题T的直观方法。 但是,矩阵逆运算在计算上是庞大的,特别是对于像 D T D D^TD DTD这样的大型矩阵而言。 幸运的是,可以通过假设循环边界条件,我们可以对上述问题应用二维FFT技术(快速傅里叶变换),这使我们能够快速计算解,有:
T ( t + 1 ) ← F − 1 ( F ( 2 T ′ + μ ( t ) D T ( G ( t ) − Z ( t ) μ ( t ) ) ) 2 + μ ( t ) ∑ d ∈ { h , v } F ( D d ) ^ ∘ F ( D d ) } ) (12) \begin{aligned} T^{(t+1)}\gets F^{-1}(\frac{F(2T'+\mu^{(t)}D^T(G^{(t)}-\frac{Z^{(t)}}{\mu^{(t)}}))}{2+\mu^{(t)}\sum_{d\in\{h,v\}}\widehat{F(D_d)}\circ F(D_d)\}}) \tag{12}\end{aligned} T(t+1)←F−1(2+μ(t)∑d∈{ h,v}F(Dd)∘F(Dd)}F(2T′+μ(t)DT(G(t)−μ(t)Z(t))))(12)
这里的 F ( ) F() F()代表二维快速傅里叶变换, F − 1 ( ) F^{-1}() F−1()和 F ( ) ^ \widehat {F()} F()分别代表二维反傅里叶变换和 F ( ) F() F()的复合共轭。这些运算都是对每个像素点的。
子问题 G
同样地,去掉(9)中与G无关的项,得到:
G ( t + 1 ) ← arg min G k ∣ ∣ W ⋅ G ∣ ∣ 1 + ϕ ( Z ( t ) , ▽ T ( t ) − G ) (13) \begin{aligned} G^{(t+1)}\gets \argmin_Gk||W\cdot G||_1+\phi(Z^{(t)},\triangledown T^{(t)}-G) \tag{13}\end{aligned} G(t+1)←Gargmink∣∣W⋅G∣∣1+ϕ(Z(t),▽T(t)−G)(13)
通过执行收缩操作 (我也不太知道这个操作),可以轻松获得(13)的闭式解:
G ( t + 1 ) = S k W μ ( t ) [ ▽ T ( t + 1 ) + Z ( t ) μ ( t ) ] (14) \begin{aligned} G^{(t+1)}=S_{\frac{kW}{\mu^(t)}}[\triangledown T^{(t+1)}+\frac{Z^{(t)}}{\mu^{(t)}}] \tag{14}\end{aligned} G(t+1)=Sμ(t)kW[▽T(t+1)+μ(t)Z(t)](14)
其中 S ε > 0 [ ] S_{\varepsilon \gt 0}[ ] Sε>0[]代表收缩操作(原文:shrinkage operator),定义为: S ε [ x ] = s g n ( x ) max ( ∣ x ∣ − ε , 0 ) S_{\varepsilon }[ x]=sgn(x)\max(|x|-\varepsilon,0) Sε[x]=sgn(x)max(∣x∣−ε,0),收缩算子对向量和矩阵的扩展是简单地逐个元素地处理数据,例如 S A [ X ] S_A [X] SA[X]使用由A的相应项给定的阈值对X的元素执行收缩。
子问题 Z和 μ \mu μ
更新Z和 μ \mu μ可以通过下面的操作得到:
Z ( t + 1 ) ← Z ( t ) + μ ( t + 1 ) ( ▽ T ( t + 1 ) − G ( t + 1 ) ) ; μ ( t + 1 ) ← μ ( t ) ρ , ρ > 1 (14) \begin{aligned} Z^{(t+1)}&\gets Z^{(t)}+\mu^{(t+1)}(\triangledown T^{(t+1)}-G^{(t+1)});\\ \mu^{(t+1)}&\gets\mu^{(t)}\rho,\rho\gt1 \tag{14}\end{aligned} Z(t+1)μ(t+1)←Z(t)+μ(t+1)(▽T(t+1)−G(t+1));←μ(t)ρ,ρ>1(14)
ALM算法中概述了问题(7)的精确求解器的整个过程。这个迭代更新操作的停止条件是 ∣ ∣ ▽ T ( t + 1 ) − G ( t + 1 ) ∣ ∣ F < δ ∣ ∣ T ′ ∣ ∣ F ||\triangledown T^{(t+1)}-G^{(t+1)}||_F\lt \delta||T'||_F ∣∣▽T(t+1)−G(t+1)∣∣F<δ∣∣T′∣∣F,这里的 δ = 1 0 − 5 \delta=10^{-5} δ=10−5;或者设置的最大迭代次数已经到达。
到这里,已经介绍完ALM加速优化算法了,最后把算法的流程图放上来,就更清晰。
对于这一部分,原文中还分析了使用ALM算法的两个关键指标:收敛性和计算复杂度。在这里就不详细写了,有兴趣的可以翻看原文。下面介绍第二种加速算法。
Speed-up Method(2):权重变量
尽管第一种优化方法的复杂度已经是相当低,但我们还是希望能进一步降低它。 让我们再回看一下问题(7), 带来迭代过程的因素是稀疏加权梯度项,即 ∣ ∣ W ◦ ▽ T ∣ ∣ 1 ||W◦\triangledown T||_1 ∣∣W◦▽T∣∣1。 L1正则项与在T上求梯度的运算一起使得式子有些复杂,但是单独拆分出来分析,以下关系是成立:
lim ϵ → 0 + ∑ x ∑ d ∈ { h , v } W d ( x ) ( ▽ d T ( x ) ) 2 ∣ ▽ d T ′ ( x ) ∣ + ϵ (16) \begin{aligned} \lim_{\epsilon \to 0^+}\sum_x\sum_{d\in\{h,v\}}\frac{W_d(x)(\triangledown_d T(x))^2}{|\triangledown_dT'(x)|+\epsilon } \tag{16}\end{aligned} ϵ→0+limx∑d∈{ h,v}∑∣▽dT′(x)∣+ϵWd(x)(▽dT(x))2(16)
根据(16),我们可以使用 ∑ x ∑ d ∈ { h , v } W d ( x ) ( ▽ d T ( x ) ) 2 ∣ ▽ d T ′ ( x ) ∣ + ϵ \sum_x\sum_{d\in\{h,v\}}\frac{W_d(x)(\triangledown_d T(x))^2}{|\triangledown_dT'(x)|+\epsilon } ∑x∑d∈{ h,v}∣▽dT′(x)∣+ϵWd(x)(▽dT(x))2近似等于 ∣ ∣ W ◦ ▽ T ∣ ∣ 1 ||W◦\triangledown T||_1 ∣∣W◦▽T∣∣1。所以,(7)可以被写成:
min T ∣ ∣ T ′ − T ∣ ∣ F 2 + k ∑ x ∑ d ∈ { h , v } W d ( x ) ( ▽ d T ( x ) ) 2 ∣ ▽ d T ′ ( x ) ∣ + ϵ (17) \begin{aligned} \min_T||T'-T||^2_F+k\sum_x\sum_{d\in\{h,v\}}\frac{W_d(x)(\triangledown_d T(x))^2}{|\triangledown_dT'(x)|+\epsilon } \tag{17}\end{aligned} Tmin∣∣T′−T∣∣F2+kx∑d∈{ h,v}∑∣▽dT′(x)∣+ϵWd(x)(▽dT(x))2(17)
尽管目标函数发生了变化,但与原始函数相比,从初始光照估计值T中提取照明结构的目标与理论是一致的。更具体地,当 ∣ ▽ d T ( x ) ∣ |\triangledown_dT(x)| ∣▽dT(x)∣小时, ∣ ▽ d T ′ ( x ) ∣ |\triangledown_dT'(x)| ∣▽dT′(x)∣将被抑制,值 W d ( x ) ( ▽ d T ( x ) ) 2 ∣ ▽ d T ′ ( x ) ∣ + ϵ \frac{W_d(x)(\triangledown_d T(x))^2}{|\triangledown_dT'(x)|+\epsilon } ∣▽dT′(x)∣+ϵWd(x)(▽dT(x))2也将被抑制。 换句话说,目标T’被约束以避免在最初估计的照明图具有小幅度的梯度。 相反,如果 ∣ ▽ d T ( x ) ∣ |\triangledown_dT(x)| ∣▽dT(x)∣强,则上述抑制得到缓解,因为该位置更可能在结构边界上而不是规则纹理上。
从上面的分析可以看出,问题(17)仅涉及二次项。 因此,可以通过解决以下问题直接解决此问题:
( I + ∑ d ∈ { h , v } D d T D i a g ( w d ′ ) D d ) t = t ′ (18) \begin{aligned} (I+\sum_{d\in\{h,v\}}D^T_dDiag(w'_d)D_d)t=t' \tag{18}\end{aligned} (I+d∈{ h,v}∑DdTDiag(wd′)Dd)t=t′(18)
这里的 w d ′ w'_d wd′是 W ’ d 和 W d ′ ( x ) ← W d ( x ) ∣ ▽ d T ′ ( x ) ∣ + ϵ W’_d和W'_d(x)\gets \frac{W_d(x)}{|\triangledown_dT'(x)|+\epsilon } W’d和Wd′(x)←∣▽dT′(x)∣+ϵWd(x)的矢量版本,操作 D i a g ( x ) Diag(x) Diag(x)是使用向量x构造对角矩阵。 ( I + ∑ d ∈ { h , v } D d T D i a g ( w d ′ ) D d ) (I+\sum_{d\in\{h,v\}}D^T_dDiag(w'_d)D_d) (I+∑d∈{ h,v}DdTDiag(wd′)Dd)是一个对称的正定拉普拉斯矩阵。这里,就只要优化算法消除迭代t就可以了,大大地减少了计算量。
对于初始光照图上的结构感知细化,关键是W的设计。在这一部分中,我们讨论以下三种可能的加权策略。
- 策略1: 将权重矩阵设置为:
W h ( x ) ← 1 ; W v ( x ) ← 1 (20) \begin{aligned} W_h(x)\gets 1;W_v(x)\gets 1 \tag{20}\end{aligned} Wh(x)←1;Wv(x)←1(20)
这使得问题(7)转变为经典的L2损失总方差最小化问题。 - 策略2: 将初始照明图的梯度用作权重是合理的,因此产生:
W h ( x ) ← 1 ∣ ▽ h T ′ ( x ) ∣ + ϵ ; W v ( x ) ← 1 ∣ ▽ v T ′ ( x ) ∣ + ϵ (21) \begin{aligned} W_h(x)&\gets \frac{1}{|\triangledown_hT'(x)|+\epsilon};\\ W_v(x)&\gets \frac{1}{|\triangledown_vT'(x)|+\epsilon} \tag{21}\end{aligned} Wh(x)Wv(x)←∣▽hT′(x)∣+ϵ1;←∣▽vT′(x)∣+ϵ1(21) - 策略3: 受相对总变异(RTV)的启发,对于每个位置,权重均通过以下方式设置:
W h ( x ) ← ∑ y ∈ Ω ( x ) G σ ( x , y ) ∣ ∑ y ∈ Ω ( x ) G σ ( x , y ) ▽ h T ′ ( x ) ∣ + ϵ ; W v ( x ) ← ∑ y ∈ Ω ( x ) G σ ( x , y ) ∣ ∑ y ∈ Ω ( x ) G σ ( x , y ) ▽ v T ′ ( x ) ∣ + ϵ (22) \begin{aligned} W_h(x)&\gets \sum_{y\in \Omega(x)}\frac{G_\sigma(x,y)}{|\sum_{y\in\Omega(x)}G_\sigma(x,y)\triangledown_hT'(x)|+\epsilon};\\ W_v(x)&\gets \sum_{y\in \Omega(x)}\frac{G_\sigma(x,y)}{|\sum_{y\in\Omega(x)}G_\sigma(x,y)\triangledown_vT'(x)|+\epsilon} \tag{22}\end{aligned} Wh(x)Wv(x)←y∈Ω(x)∑∣∑y∈Ω(x)Gσ(x,y)▽hT′(x)∣+ϵGσ(x,y);←y∈Ω(x)∑∣∑y∈Ω(x)Gσ(x,y)▽vT′(x)∣+ϵGσ(x,y)(22)
这里的 G σ ( x , y ) G_\sigma(x,y) Gσ(x,y)是由具有标准偏差σ的高斯核产生。 形式上, G σ ( x , y ) G_\sigma(x,y) Gσ(x,y)表示为:
G σ ( x , y ) ∝ exp ( − d i s t ( x , y ) 2 σ 2 ) (20) \begin{aligned} G_\sigma(x,y)\propto\exp(-\frac{dist(x,y)}{2\sigma^2}) \tag{20}\end{aligned} Gσ(x,y)∝exp(−2σ2dist(x,y))(20)
其中,函数dist(x, y)用于测量位置x和y之间的空间欧几里得距离。 实际上,第二种加权策略就是其中一种。 当 σ → 0 + \sigma \to 0^+ σ→0+,这两种策略获得相同的权重矩阵。 我们注意到,与RTV不同,我们的权重矩阵是基于给定的T’构造的,而不是根据T进行迭代更新的,这意味着W只需要计算一次。
实验
最后,LIME算法的整体流程是:
放上一些实验结果:


conclusion
本文主要整理了低照度图像增强中的一种传统方法:LIME。呼~好累,不多说啦。最后按套路放上文章资源:LIME: Low-light Image Enhancement via Illumination Map Estimation
如果文章对您有帮助(呜呜呜,可怜一下我码了这么多字),点个赞再走呗!!!谢谢啦(试图出卖博主样貌,来收获欢心。。。。太难了)
尊重原创,转载请注明出处!
边栏推荐
猜你喜欢










随机推荐
(12)Cookie和Session
Use tensorboard remotely on the server
桥接模式下虚拟机连接不上网络的解决方法(WIFI)
微信小程序转盘demo
pyspark.sql之实现collect_list的排序
PathMeasure 轨迹动画神器
《身体是革命的本钱,该注意时还是要注意!》
《平凡的世界》(书评)
The difference between show and exec in Qt dialog
仪表盘
关于亚马逊的坑你知道几个?
如何选择可靠的亚马逊代运营
More than pytorch from zero to build neural network to realize classification (training data sets)
如何防止浏览器指纹关联
pyspark dataframe分位数计算
GoogLeNet
At the beginning of the C language order 】 【 o least common multiple of three methods
.Net Core 技巧小结
【小白必看】初始C语言(下)
bin document read and write