当前位置:网站首页>OpenCV 图像拼接
OpenCV 图像拼接
2022-08-03 23:29:00 【我今年十六岁】
目录
一:OpenCV图像特征采集
特征提取:
一幅图中总存在着一些独特的像素点,这些点我们可以认为就是这幅图的特征,成为特征点。

计算机视觉领域特征提取:
获取一幅图中存在着一些独特的像素点。
需要解决问题:
1、提取图片中的特征点
2、解决尺度不变性问题,不同大小的图片获取到的特征是一样的。
3、提取到的特征点要稳定,能被精确定位。

二:OpenCV 特征提取算法
特征提取算法

三:OpenCV特征提取


结果:提取到的特征很粗糙,不是很精确的特征点,导致效果很差。
要求:去粗取精,获取优秀的匹配点。
四:OpenCV特征取精


取一幅图像中的一个SIFT关键点,并找出其与另一幅图像中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离得到的比率ratio少于某个阈值T,则接受这一对匹配点。
五:OpenCV透视转换
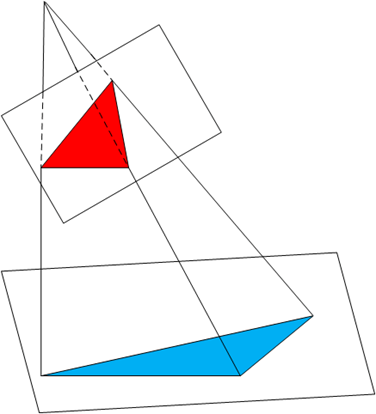

透视变换是按照物体成像投影规律进行变换,即将物体重新投影到新的成像平面。透视变换常用于机器人视觉导航研究中,由于相机视场与地面存在倾斜角使得物体成像产生畸变,通常通过透视变换实现对物体图像的校正。
使用cv::warpPerspective()进行透视变换
void cv::warpPerspective(
cv::InputArray src, // 输入图像
cv::OutputArray dst, // 输出图像
cv::InputArray M, // 3x3 变换矩阵
cv::Size dsize, // 目标图像大小
int flags = cv::INTER_LINEAR, // 插值方法
int borderMode = cv::BORDER_CONSTANT, // 外推方法
const cv::Scalar& borderValue = cv::Scalar() //常量边界时使用
);
透视矩阵 :

获取特征矩阵:
a. 根据图像的4个顶点来获取特征矩阵
cv::Mat cv::getPerspectiveTransform( // 返回3x3透视变换矩阵
const cv::Point2f* src, // 源图像四个顶点坐标(点数组)
const cv::Point2f* dst // 目标图像上四个顶点的坐标(点数组)
);
b. 函数来计算透视矩阵H(3*3)
findHomography (
InputArray srcPoints,//源平面中点的坐标矩阵.vector<Point2f>类型
InputArray dstPoints,//目标平面中点的坐标矩阵,vector<Point2f>类型
int method = 0,
double ransacReprojThreshold = 3,
OutputArray mask = noArray(),
const int maxIters = 2000,
const double confidence = 0.995
)
六:OpenCV图像配准融合与图像反投影优化

图片拼接流程思想:

边栏推荐
- ML's yellowbrick: A case of interpretability (threshold map) for LoR logistic regression model using yellowbrick based on whether Titanic was rescued or not based on the two-class prediction dataset
- Click the icon in Canvas App to generate PDF and save it to Dataverse
- Pytest学习-skip/skipif
- Work Subtotal QT Packing
- utlis 线程池
- 代码随想录笔记_动态规划_416分割等和子集
- Creo 9.0二维草图的诊断:重叠几何
- Storage engine written by golang, based on b+ tree, mmap
- libnet
- HCIP BGP lab report
猜你喜欢

全球首款量产,获定点最多!这家AVP Tier1如何实现领跑?

AOSP CameraLatencyHistogram的原理与使用

RSS订阅微信公众号初探-feed43

BMN: Boundary-Matching Network for Temporal Action Proposal Generation阅读笔记

用两个栈模拟队列

Analysys Analysis: The transaction scale of China's online retail B2C market in Q2 2022 will reach 2,344.47 billion yuan
![[Paper Reading] TRO 2021: Fail-Safe Motion Planning for Online Verification of Autonomous Vehicles Using Conve](/img/17/342676e20fc04ce9083c5ed443bc1d.png)
[Paper Reading] TRO 2021: Fail-Safe Motion Planning for Online Verification of Autonomous Vehicles Using Conve

Pytest学习-setup/teardown

Binary search tree to solve the fallen leaves problem

Pytest学习-skip/skipif
随机推荐
3D 语义分割——2DPASS
ML之interpret:基于titanic泰坦尼克是否获救二分类预测数据集利用interpret实现EBC模型可解释性之全局解释/局部解释案例
2022/8/3 Exam Summary
utils timer
栈的压入、弹出序列
rosbridge-WSL2 && carla-win11
Take an example of a web worker
RSS feeds WeChat public - feed43 asain
【LeetCode】最长公共子序列(动态规划)
SRE运维解密-什么是SRE:DevOps模型的具体实践!
响应式织梦模板塑身瑜伽类网站
Websocket multi-threaded sending message error TEXT_PARTIAL_WRITING--Use case of spin lock replacing synchronized exclusive lock
The curl using guide
How many way of calling a function?
Cloud platform construction solutions
First domestic open source framework 】 【 general cloud computing framework, any program can be made into cloud computing.
简单了解下 TCP,学习握手和挥手以及各种状态到底是怎么样的
Unity2021发布WebGL雾效消失问题
The principle and use of AOSP CameraLatencyHistogram
获国际权威认可 | 云扩科技入选《RPA全球市场格局报告,Q3 2022》