language-models-are-knowledge-graphs-pytorch
Language models are open knowledge graphs ( work in progress )
A non official reimplementation of Language models are open knowledge graphs
The implemtation of Match is in process.py
Execute MAMA(Match and Map) section
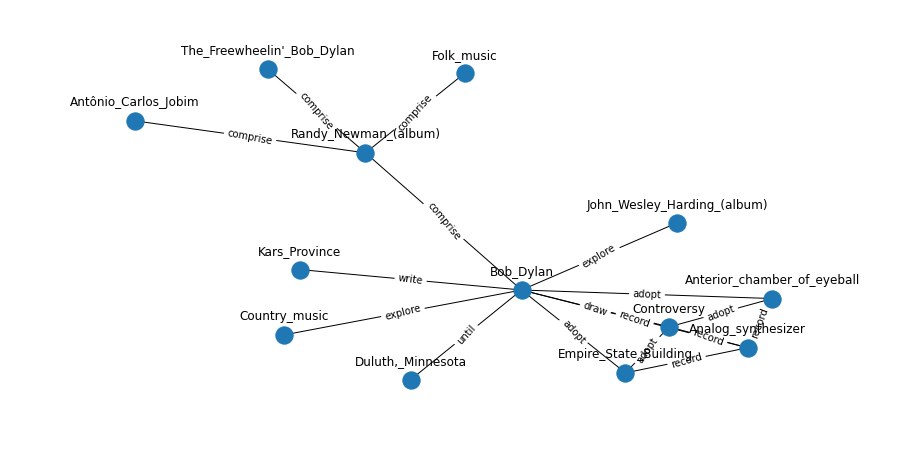
Do note the extracted results is still quite noisy and should then filtered based on relation unique pair frequency
python extract.py examples/bob_dylan.txt bert-large-cased-bob_dynlan.jsonl --language_model bert-large-cased --use_cuda true
Map
- Entity linking
The original download link for Stanford Entity linking is removed (nlp.stanford.edu/pubs/crosswikis-data.tar.bz2)[nlp.stanford.edu/pubs/crosswikis-data.tar.bz2]. I will use (REL)[https://github.com/informagi/REL] for entity disambiguation model (supervised instead of the original unsupervied) to achieve the same task.
- Relations linking (page 5, 2.2.1)
Lemmatization is done in the previous steps process.py, in this stage we remove inflection, auxiliary verbs, adjectives, adverbs words.
Adjectives extracted from here: https://gist.github.com/hugsy/8910dc78d208e40de42deb29e62df913
Adverbs extracted from here : https://raw.githubusercontent.com/janester/mad_libs/master/List%20of%20Adverbs.txt
Environment setup
This repo is run using virtualenv
virtualenv -p python3 env
source env/bin/activate
pip install -r requirements.txt

 247 Dec 07, 2022
247 Dec 07, 2022
 7 Feb 10, 2022
7 Feb 10, 2022
 3 Jan 06, 2022
3 Jan 06, 2022
 96 Oct 30, 2022
96 Oct 30, 2022
 73 Jan 01, 2023
73 Jan 01, 2023
 13 Nov 04, 2022
13 Nov 04, 2022
 80 Dec 30, 2022
80 Dec 30, 2022
 8 May 22, 2022
8 May 22, 2022
 144 Dec 30, 2022
144 Dec 30, 2022
 6 Jun 24, 2022
6 Jun 24, 2022
 2 Oct 09, 2022
2 Oct 09, 2022
 1 Jan 25, 2022
1 Jan 25, 2022
 71 Nov 18, 2022
71 Nov 18, 2022
 64 Jan 03, 2023
64 Jan 03, 2023
 16 Aug 30, 2022
16 Aug 30, 2022
 2 Aug 11, 2022
2 Aug 11, 2022
 51 Dec 08, 2022
51 Dec 08, 2022
 8 Sep 03, 2022
8 Sep 03, 2022
 370 Dec 29, 2022
370 Dec 29, 2022
 4 Dec 22, 2022
4 Dec 22, 2022