当前位置:网站首页>相控阵天线低副瓣加权处理
相控阵天线低副瓣加权处理
2022-04-22 10:48:00 【ML__LM】
1 基本原理




2 源代码
%% 函数功能:低副瓣加权处理
clc;
clear all;
close all;
%% 参数设置
c=3e8; % 光速
f=22e9; % 信号频率
lamda=c/f; % 波长
d=lamda/2; % 阵元间距
N=12; % 阵元个数
theta0=20; % 波束指向角度
bujing=1e-3;
theta=-90:bujing:90; % 扫描角取值范围
n = [0:1:N-1]'; % 列矢量
RdB = 30; % 主副瓣比(dB值)
%% 权值计算
tao=n*d*sind(theta0)/c; % 延时
W = exp(1j*2*pi*f*tao); % 相控阵天线基本理论得到的权值
%% 阵元幅度激励计算(chebyshev加权)
[I_final] = I_func(N,RdB);
W_low=W.*I_final;
%% 波束形成
for p=1:length(theta) % 扫描角取值范围
V = exp(1j*2*pi*f*n*d*sin(theta(p)*pi/180)/c); % 方向矢量
B(p) =abs(W'*V); % 相控阵天线加权 '表示共轭转置 .'表示转置
B_low(p) =abs(W_low'*V); % chebyshev加权
end
Beam_F=20*log10(B/max(B)); % 归一化
Beam_F_low=20*log10(B_low/max(B_low)); % 归一化
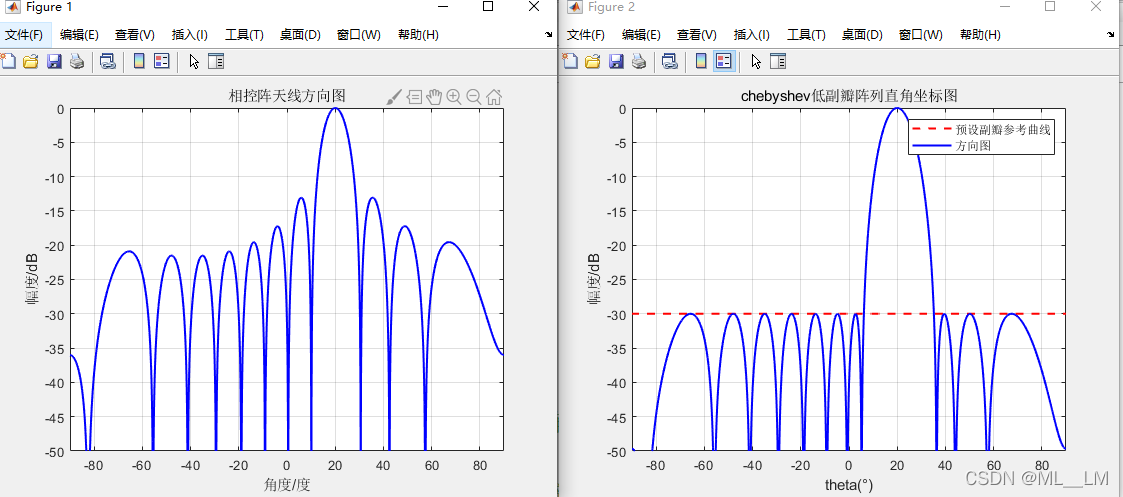
%% 绘图
figure(1)
plot(theta,Beam_F,'b','LineWidth',1.5);grid on;
xlabel('角度/度');ylabel('幅度/dB');
axis([-90 90 -50 0]);
title('相控阵天线方向图');
figure(2)
H = -ones(1,length(Beam_F))*RdB; % 根据预先设置的主副瓣比得到的参考曲线
plot(theta,H,'r--','LineWidth',1.5);hold on;
plot(theta,Beam_F_low,'b','LineWidth',1.5);grid on;
axis([-90 90 -50 0]);
xlabel('theta(°)');ylabel('幅度/dB');
title('chebyshev低副瓣阵列直角坐标图');
legend('预设副瓣参考曲线','方向图');
function [I_final] = I_func(N,RdB)
if rem(N,2)==0 % 求和项数M(奇偶不同)
M = N/2;
else
M = (N-1)/2+1;
end
% 初始矩阵赋值
I = zeros(1,M); % 电流幅度矩阵
S = zeros(M,M); % 阵因子系数矩阵
S_compare = zeros(1,M); % 系数比对矩阵
R = 10^(RdB/20); % 非dB 值的主副瓣比
x0 = 1/2*( (R+sqrt(R^2-1))^(1/(N-1))+(R-sqrt(R^2-1))^(1/(N-1)) );% 变量代换值x0
A = [1,0,0,0,0,0,0,0,0,0,0,0,0,0; % chebyshev多项式Tn(x) = cos(nu)= f(x)系数矩阵A
0,1,0,0,0,0,0,0,0,0,0,0,0,0; % 系数矩阵A每一行表示n,从n = 0开始
-1,0,2,0,0,0,0,0,0,0,0,0,0,0; % 列表示x的幂次方,从0次方开始
0,-3,0,4,0,0,0,0,0,0,0,0,0,0;
1,0,-8,0,8,0,0,0,0,0,0,0,0,0;
0,5,0,-20,0,16,0,0,0,0,0,0,0,0;
-1,0,18,0,-48,0,32,0,0,0,0,0,0,0;
0,-7,0,56,0,-112,0,64,0,0,0,0,0,0;
1,0,-32,0,160,0,-256,0,128,0,0,0,0,0;
0,9,0,-120,0,432,0,-576,0,256,0,0,0,0;
-1,0,50,0,-400,0,1120,0,-1280,0,512,0,0,0;
0,-11,0,220,0,-1232,0,2816,0,-2816,0,1024,0,0;
1,0,-72,0,840,0,-3584,0,6912,0,-6144,0,2048,0;
0,13,0,-364,0,2912,0,-9984,0,16640,0,-13312,0,4096];
%% 求S、S_compare和I
% 从系数矩阵中择选出M个求和项对应的系数S(奇偶分开讨论)
for i = 1:M
if rem(N,2)==0 % 偶数情况
for j = 1:M % 第i行表示x的i次方,
S(i,j) = A(2*j,2*i); % 第j列表示第j个求和项系数(未除x0)
end
S_compare(i) = A(N,2*i); % 比对矩阵,即下标为N-1的chebyshev多项式的系数
else % 奇数情况
for j = 1:M
S(i,j) = A(2*j-1,2*i-1);
end
S_compare(i) = A(N,2*i-1);
end
end
% 通过S和S_compare系数比对求出电流幅度
for k = 1:M
i = M-k+1;
if rem(N,2)==0 % 偶数
I(i) = (S_compare(i)*x0^(2*i-1) -I*S(i,:)')/S(i,i);
else % 奇数
I(i) = (S_compare(i)*x0^(2*(i-1)) -I*S(i,:)')/S(i,i);
end
end
I = I/max(I); % 对I归一化
if rem(N,2)==0
I_final = [fliplr(I),I]; % 最终的单元排列(左右对称)
else
I_final = [fliplr(I),I(2:end)];
end
I_final=(I_final).';
sprintf('天线单元归一化电流幅度:');
sprintf('%.3f ',I_final);
end

版权声明
本文为[ML__LM]所创,转载请带上原文链接,感谢
https://blog.csdn.net/weixin_46136963/article/details/124291639
边栏推荐
- 中职网络空间安全技能大赛P100-使用内存取证技术追踪Meterpreter会话
- P100-使用SearchSploit进行线索式渗透测试
- eval说明
- 什么样的项目适合做自动化测试?
- asm disk 磁盘部分被清空恢复---惜分飞
- Secure remote access + secure file transfer + terminal simulation + Remote Management - Shanghai daoning united with Van Dyke to bring reliable and easy to configure software to IT industry personnel
- 2022-04-17_函数(一)
- 分析API响应慢
- 机器人系统设计-coppeliasim仿真
- 【sv】 assign force区别
猜你喜欢

qDebug()打印调试信息
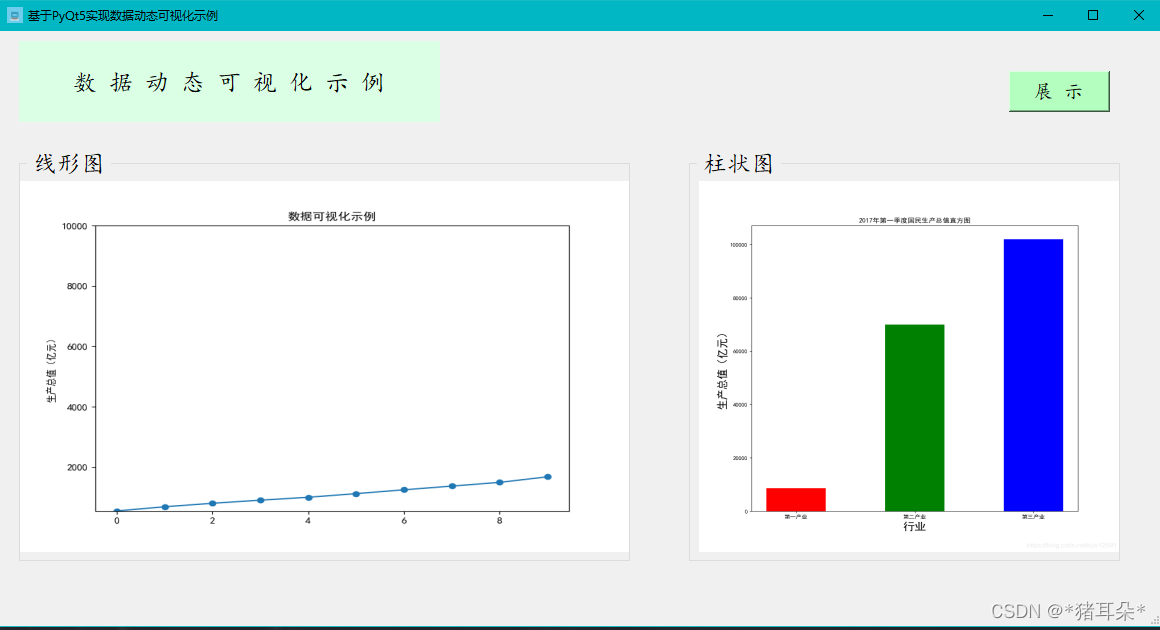
Dynamic visualization of data based on pyqt5

Caddy, the next generation web server -- the way to build a dream

OneFlow學習筆記:從Functor到OpExprInterpreter

TC397 EVADC

【leetcode】145.二叉树的后序遍历
OneFlow学习笔记:从Functor到OpExprInterpreter
基于PyQt5实现数据动态可视化

A simple PLC motion control project

The ASM disk is partially emptied and recovered
随机推荐
High quality notes on how MySQL works: understanding MySQL from the root
2022-04-19_函数(二)
Query process of 004-mysql
cesium地图右击菜单(cesium篇.72)
Error found while starting libgocrypto.mondb so. ten
12年的测试前辈给学习软件测试的你几点建议
三六零发布年报:实现营业收入约108.86亿元 安全业务增长超70%
define 的作用范围
[SV] assign force difference
中职网络空间安全技能大赛P100-使用内存取证技术追踪Meterpreter会话
分析API响应慢
【leetcode】二叉树遍历迭代法的统一模板
Async function
C语言实例100(四)
2022年中科磐云——Wb安全应用 flag
php 获取IP以分钟限制提交次数,适用于验证码获取过于频繁
數字化時代,企業運維面臨現狀及挑戰分析解讀
【leetcode】145. Binary Tree Postorder Traversal
Google Adsense suggests that the advertising capture tool is wrong, which may lead to reduced revenue. What should we do
Robot system design coppeliasim simulation