当前位置:网站首页>点云中的一些名词解释
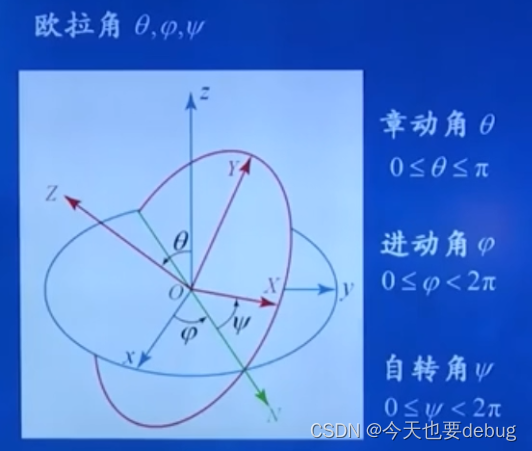
点云中的一些名词解释
2022-08-10 23:01:00 【今天也要debug】


边栏推荐
- 二叉树 | 递归遍历 | leecode刷题笔记
- Redis - Use lua script to control the number of wrong passwords and lock the account
- 二叉树 | 翻转二叉树 | leecode刷题笔记
- The Missing Semester of Your CS Education
- Android面试冲刺:2022全新面试题——剑指Offer(备战金九银十)
- koa框架(一)
- Mysql之部分表主从搭建及新增表
- 【软件测试】2022年最火的十大测试工具,你掌握了几个
- This visual tool artifact is more intuitive and easy to use!love so much
- 高精度减法
猜你喜欢





随机推荐
响应式pbootcms模板五金配件类网站
使用PageHelper自定义PageInfo进行分页+模糊查询
This visual tool artifact is more intuitive and easy to use!love so much
VulnHub之DC靶场下载与DC靶场全系列渗透实战详细过程
Kotlin 由浅入深,带你搞懂协程异常处理的那点事
一文带你了解 ViewModel 的使用及源码解析
HanLP词性表
高精度减法
性能不够,机器来凑;jvm调优实战操作详解
腾讯云轻量应用服务器配置及建网站教程
CFdiv2-Beautiful Mirrors-(期望)
HGAME 2022 Week1 writeup
SurfaceView 的双缓冲
Tencent Cloud Lightweight Application Server Configuration and Website Building Tutorial
XSLeaks side channel attack (unfinished)
Mysql's partial table master-slave construction and new table
API服务网关
web项目访问引用jar内部的静态资源
【秋招】【更新中ing】手撕代码系列
MySQL之JDBC编程增删改查