当前位置:网站首页>[ROS](10)ROS通信 —— 服务(Service)通信
[ROS](10)ROS通信 —— 服务(Service)通信
2022-08-05 02:07:00 【CynalFly】
文章只是个人学习过程中学习笔记,主要参考ROS教程1。
1、概念
服务(Services):是节点之间通讯的另一种方式。服务允许节点发送一个请求(request)并获得一个响应(response)。
2、 服务通信机制
服务通信 是也是ROS通信中最常用的一种基于 请求和响应 模型的通信方式。用于临时性、非周期性、有一定逻辑处理的数据传输场景。
服务通信 通过允许请求-响应通信来实现更紧密的耦合。服务客户端向服务服务器发送请求消息并等待响应(客户端将阻塞,直到收到响应)。服务器将使用请求中的数据构造响应消息并将其发送回客户端。每个服务都有一个类型,它决定了请求和响应消息的结构。服务也有在一个网络中唯一的名称。
ROS Node想通过service方式来传递消息: 首先Server节点和Client节点都要到ROS Master(节点管理器)中进行注册节点名称、服务(Sevice)名称、消息类型、URI地址和端口;然后, ROS Master会根据注册表中的信息匹配Server和 Client,并向Client发送 Server 的 TCP 地址信息;其次,Client 根据Server的信息,使用TCP与Server 建立连接,并请求发送消息;最后, Server 接收、解析请求的数据,并产生响应结果返回给 Client。

1.客户端请求被处理时,需要保证服务器已经启动;
2.服务端和客户端都可以存在多个;
3、服务命令rosservice
rosservice2 可以很容易地通过服务附加到ROS客户端/服务器框架上。
| 命令 | 功能 |
|---|---|
rosservice argc | 输出服务的参数 |
rosservice call | 用给定的参数调用服务 |
rosservice find | 按服务的类型查找服务 |
rosservice info | 输出服务的信息 |
rosservice list | 输出活跃的服务 |
rosservice type | 输出服务的类型 |
rosservice uri | 输出服务的ROSRPC uri |
Tips:使用
rosservice <command> -h帮助选项获取更详细的用法。
4、服务通信实操 – 在乌龟模拟器的指定位置孵化一个小乌龟
通过ROS内置的乌龟模拟器(turtlesim)来进行服务通信的实操,在乌龟模拟器的指定位置孵化一个小乌龟。
实现的步骤如下:
步骤1:在新终端中启动roscore
roscore
步骤2:在新终端中启动乌龟模拟器节点turtlesim_node
rosrun turtlesim turtlesim_node
步骤3:通过调试工具rqt_service_caller和编程的方式在乌龟模拟器的指定位置孵化一个小乌龟。
4.1 调试工具实现
通过rqt_service_caller工具模拟服务请求:
- 启动
rqt_service_caller工具
rosrun rqt_service_caller rqt_service_caller
- 通过图形化配置参数,如果所示,选择孵化服务
/spawn,在Request中配置孵化位置、角度、乌龟名字请求参数,然后点击右上角call 发送请求,如果乌龟模拟器响应成功,会在Response中显示结果,并在乌龟模拟器turtlesim中孵化出一个小乌龟。

4.2 编程实现(C++)
在beginner_tutorials软件包的src目录下创建服务客户端源文件:
roscd beginner_tutorials
cd src
touch turtle_spawn_client.cpp
4.2.1 服务客户端程序(turtle_spawn_client.cpp)
#include "ros/ros.h"
#include "turtlesim/Spawn.h"
int main(int argc, char **argv)
{
setlocale(LC_ALL,"");
/* 初始化ROS节点 */
ros::init(argc,argv,"turtle_spawn_client");
/* 为这个节点创建句柄 */
ros::NodeHandle nh;
/* 创建service client 指定服务类型为turtlesim::Spawn */
ros::ServiceClient client = nh.serviceClient<turtlesim::Spawn>("/spawn");
/* 等待服务器启动 */
ros::service::waitForService("/spawn");
/* 实例化服务数据类型,并给成员request赋值 */
turtlesim::Spawn spawn;
spawn.request.x = 2;
spawn.request.y = 8;
spawn.request.theta = 1.8;
spawn.request.name = "new_turtle1";
/* 服务调用 */
if(client.call(spawn))
{
ROS_INFO("小乌龟[%s]已孵化", spawn.response.name.c_str());
}
else
{
ROS_INFO("小乌龟孵化失败!");
}
return 0;
}
4.2.2 配置CMakeLists.txt
只需将这几行添加到CMakeLists.txt文件的底部:
add_executable(turtle_spawn_client src/turtle_spawn_client.cpp)
target_link_libraries(turtle_spawn_client ${catkin_LIBRARIES})
add_dependencies(turtle_spawn_client ${PROJECT_NAME}_gencpp)
4.2.3 编译、运行
在你的工作空间下执行catkin_make编译,将turtle_spawn_client.cpp编译成可执行文件turtle_spawn_client。编译后,在终端中执行过程如下所示。
4.3 编程实现(Python)
在beginner_tutorials软件包的scripts目录下创建服务客户端源文件:
roscd beginner_tutorials
cd scripts
touch turtle_client.py
chmod +x turtle_client.py
4.3.1 服务客户端程序(turtle_spawn_client.py)
#!/usr/bin/env python
# encoding: utf-8
import rospy
from turtlesim.srv import Spawn,SpawnRequest
def turtle_spawn_client():
# 初始化ROS节点
rospy.init_node("turtle_spawn_client")
# 创建sevice client
spawn_client = rospy.ServiceProxy('/spawn',Spawn)
# 等待服务开启
spawn_client.wait_for_service()
# 创建请求数据
spawn_req = SpawnRequest()
spawn_req.x = 8.0
spawn_req.y = 8.0
spawn_req.theta = 0.8
spawn_req.name = "new_turtle2"
try:
# 调用服务并获取相应结果
spawn_res = spawn_client.call(spawn_req)
rospy.loginfo("小乌龟[%s]龟已孵化", spawn_res.name)
except rospy.ServiceException as e:
rospy.loginfo("小乌龟孵化失败!")
if __name__ == '__main__':
turtle_spawn_client()
4.2.2 配置CMakeLists.txt
只需catkin_install_python中添加 scripts/turtle_spawn_client.py即可:
# 安装python可执行脚本
catkin_install_python(PROGRAMS
scripts/turtle_spawn_client.py
...
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
4.2.3 编译、运行
其实这个例子很简单,不需要编译,直接执行python文件就行。但是我们还是养成习惯吧,每次创建和修改代码后,就catkin_make编译一下,即使是Python节点也必须使用它。这是为了确保能为创建的消息和服务自动生成Python代码。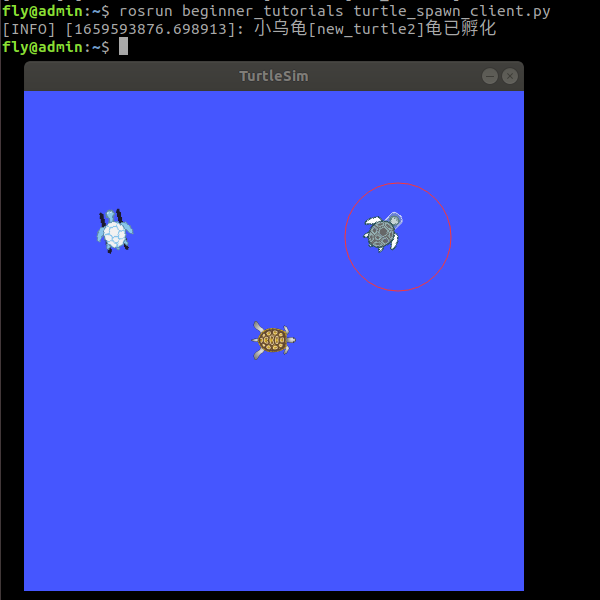
5、服务命令实操
ROS提供了一些命令行工具帮助我们查看Service的信息。通过小乌龟模拟器(turtlesim)来实操服务命令。
5.1 rosservice list
rosservice list 输出活跃(当前正在运行)服务的信息。

list命令显示有两个与rosout节点有关的服务:/rosout/get_loggers和/rosout/set_logger_level。其余的都是turtlesim节点提供了9个服务。
5.2 rosservice argc
rosservice argc[service] 输出服务的所有参数。

5.3 rosservice type
rosservice type [service] 输出服务的类型。

5.4 rosservice find
rosservice call [service] 按服务的类型查找服务。
5.5 rosservice uri
rosservice uri 输出服务的ROSRPC uri。

5.6 rosservice info
rosservice info [service] 输出服务的信息。
5.7 rosservice call
rosservice call [service] [args] 用给定的参数调用服务。
# 调用服务 /spawn ,给定参数:位置(8.0,2.0)、角度为1.8、名字为new_turtle3,然后孵化小乌龟。
rosservice call /spawn 8.0 2.0 1.8 "new_turtle3"

ROS.otg. ROS教程[EB/OL]. 2020-12-22[2022-7-5].
http://wiki.ros.org/cn/ROS/Tutorials. ︎ROS.otg. rosservice[EB/OL]. 2020-12-22[2022-7-5].
https://wiki.ros.org/rosservice. ︎
边栏推荐
- SuperMap iDesktop.Net之布尔运算求交——修复含拓扑错误复杂模型
- .Net C# 控制台 使用 Win32 API 创建一个窗口
- fragment可见性判断
- MySQL learning
- 《.NET物联网从零开始》系列
- C学生管理系统 据学号查找学生节点
- Intel XDC 2022 Wonderful Review: Build an Open Ecosystem and Unleash the Potential of "Infrastructure"
- 如何基于OpenVINO POT工具简单实现对模型的量化压缩
- Exploding the circle of friends, Alibaba produced billion-level concurrent design quick notes are too fragrant
- [Unity Entry Plan] Handling of Occlusion Problems in 2D Games & Pseudo Perspective
猜你喜欢

How to simply implement the quantization and compression of the model based on the OpenVINO POT tool

如何逐步执行数据风险评估

HOG feature study notes
“嘀哩哩,等灯等灯”,工厂安全生产的提示音

关于#sql shell#的问题,如何解决?

释放技术创新引擎,英特尔携手生态合作伙伴推动智慧零售蓬勃发展
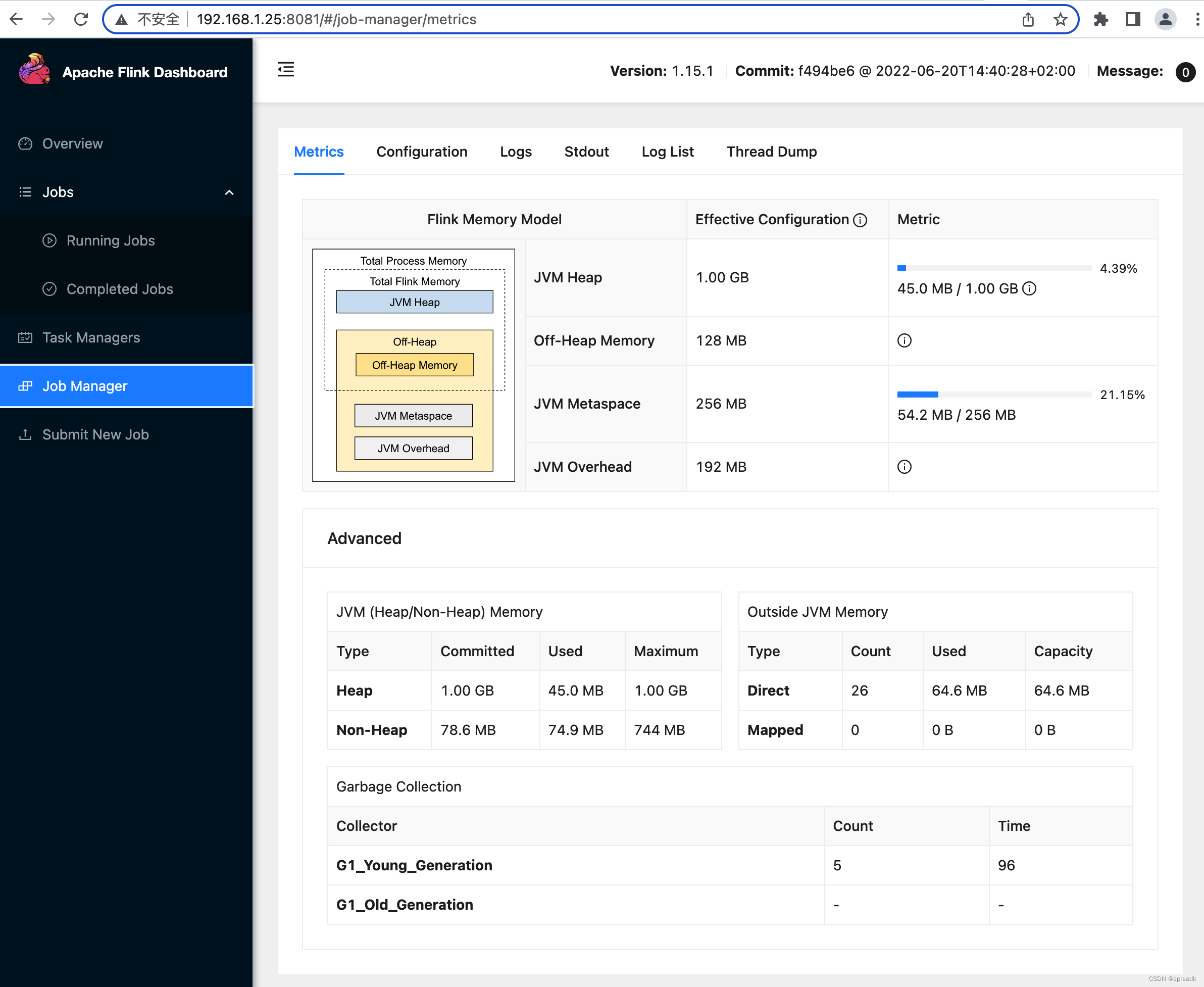
Flink 1.15.1 集群搭建(StandaloneSession)

Utilities 
Apache DolphinScheduler新一代分布式工作流任务调度平台实战-中

The use of pytorch: temperature prediction using neural networks
随机推荐
Using OpenVINO to implement the flying paddle version of the PGNet inference program
迁移学习——Joint Geometrical and Statistical Alignment for Visual Domain Adaptation
EBS uses virtual columns and hint hints to optimize sql case
Tree search (bintree)
Are testing jobs so hard to find?I am 32 this year and I have been unemployed for 2 months. What should an older test engineer do next to support his family?
使用OpenVINO实现飞桨版PGNet推理程序
如何发现一个有价值的 GameFi?
使用SuperMap iDesktopX数据迁移工具迁移ArcGIS数据
如何基于OpenVINO POT工具简单实现对模型的量化压缩
刷爆朋友圈,Alibaba出品亿级并发设计速成笔记太香了
Methods commonly used interface automation test framework postman tests
在这个超连接的世界里,你的数据安全吗
LPQ(局部相位量化)学习笔记
LPQ (local phase quantization) study notes
Greenplum数据库故障分析——能对数据库base文件夹进行软连接嘛?
.Net C# 控制台 使用 Win32 API 创建一个窗口
使用SuperMap iDesktopX数据迁移工具迁移地图文档和符号
Simple implementation of YOLOv7 pre-training model deployment based on OpenVINO toolkit
Intel XDC 2022 Wonderful Review: Build an Open Ecosystem and Unleash the Potential of "Infrastructure"
回顾51单片机