当前位置:网站首页>腾讯发布第二代四足机器人Max,梅花桩上完成跳跃、空翻
腾讯发布第二代四足机器人Max,梅花桩上完成跳跃、空翻
2022-08-09 12:06:00 【CSDN资讯】
8月8日,腾讯正式发布Max二代机器人(以下简称Max)。据悉,Max能够在梅花桩上完成旋转踏步、单桩跳跃、双轮站立等高难度动作。同时,过桩速度达到“前辈”Jamoca的4倍。
定位精度累计误差小于1%的Max二代机器人登场
依托于机器人视觉定位、地形识别、全向六自由度运动规划、高精度模型预测控制等技术,Max能够对复杂地形进行精确识别,并且根据地形实时想好步子,避免踩歪、打滑、摔倒等风险。通过梅花桩复杂地形场景,以及精确落点跳跃等条件设置,成功验证了Max对复杂地形的适应能力。
据了解,Max是由腾讯Robotics X实验室自研的多模态四足机器人,采用原创的腿轮一体的本体设计,实现了“崎岖路面走得稳,平坦路面跑得快”。相比一代,Max在视觉感知、轨迹规划、运动控制等方面实现技术创新,标志着腾讯在机器人灵敏运动研究上取得了新的突破。

在腾讯 Robotics X 实验室为Max设置的测试场景中,Max需要快速通过一个阵列全长10米,高0.8米(约为Max身高2倍)高低起伏的梅花桩阵列。
想要顺利通过这一复杂地形,Max面对的挑战重重。首先,Max需要实时地形识别、建图,以应对密集细杆梅花桩这种复杂并带有轻微晃动的地形。
看准地形后,Max需要根据地形规划适合的运动轨迹,自动调整俯仰、侧身与转向,从而适应高低起伏的地形。
从结果来看,Max在持续高频的冲击条件下,定位精度累计误差小于1%,地形识别精度小于2cm。
为更好保障Max力控精准度,腾讯Robotics X实验室在机器人移动能力和机身本体设计上都做了改良。Max具备触地检测能力,可准确判断足端触地状态,进行质心轨迹规划与柔顺力控,避免身体的大幅度振荡以及足端触地后的反弹,确保落地平稳与运动流畅。
同时,Max的机身本体在2021年版本基础上,完成了结构和电气系统的大量优化,能够应对跑、跳、翻等高动态动作产生的持续强力冲击,保证了本体的稳定性和可靠性。
除移动表现的进步之外,Max在运动效率方面也有显著提升。Max在完成跳跃、空翻等高难度动作时,可规划出最省力的运动轨迹,即如何让所需的驱动力最小化。
具体来讲,Max可以根据目标跳跃距离、跳跃高度以及关节力矩限制等条件,计算出最优的跳跃轨迹,兼容四脚跳(Pronking)和双脚跳(Bounding)等步态。
自研模型算法、深度强化学习让Max动作更灵动
腾讯Robotics X实验室于2018年成立,致力推进人机协作的下一代机器人研究,打造虚拟世界到真实世界的载体与连接器。目前实验室研究方向包括作为机器人基础技术的感知能力,以及灵敏运动、灵巧操控、智能体三大支柱技术,致力于智能协作机器人。
据官方介绍,Max原创性地融合了机器人腿式与轮式运动模态,从硬件上的机械和电路设计,到软件上的系统框架和控制算法创新,使得Max在崎岖路面走得稳,在平坦路面跑得快,更契合人类社会的现实环境。
此次的梅花桩升级挑战是腾讯轮腿融合机器人灵敏运动技术的进一步突破。依托于团队自研的单目视觉惯性定位、全新的六维全向运动实时规划、非线性轨迹优化、高精度模型预测控制等算法的支持,实现了更高精度的身体位置与姿态控制。
为更好完成跳跃、空翻等高动态动作所带来的对机器人控制精度的挑战,团队结合离线最优跳跃轨迹规划及实时平衡运动轨迹规划,自研了模型预测控制算法(Chi et al., A Linearization of Centroidal Dynamics for the Model-Predictive Control of Quadruped Robots, ICRA 2022)。
与此同时,腾讯Robotics X实验室也正利用深度强化学习等AI技术,推进机器人智能研究,让机器人在虚拟环境中自主学习,更好地适应复杂环境的变化。
不同于预先设计好规则之后做重复任务的工业机器人,腾讯RoboticsX实验室更关注机器人的自主特性研究,目的就是要在有很大不确定性的动态环境里,能够实现机器人的自主判断、自主决策,并自主完成任务。
据实验室研究人员介绍,基于深度强化学习与sim2real等技术,Max用几个小时就能初步学会自然灵动的步态。
作为腾讯Robotics X实验室自研的多模态四足机器人移动技术平台,Max的相关新技术与算法同时具备良好的迁移性,为实验室研发其他类型的移动机器人、适配潜在应用场景沉淀技术与经验。
边栏推荐
- 二叉树的序列化和反序列化
- ABAP 面试题:如何使用 ABAP 编程语言的 System CALL 接口,直接执行 ABAP 服务器所在操作系统的 shell 命令?
- Too much volume... Tencent was asked on the side that the memory was full, what would happen?
- 合并两个有序列表
- 如何修改data work上jdbc驱动的版本
- Intranet penetration tool ngrok usage tutorial
- 脱光衣服待着就能减肥,当真有这好事?
- shell脚本------函数的格式,传参,变量,递归,数组
- 链表噩梦之一?5000多字带你弄清它的来龙去脉
- HAproxy: load balancing
猜你喜欢
微信一面:一致性哈希是什么,使用场景,解决了什么问题?

智驾科技完成C1轮融资,此前2轮已融4.5亿元
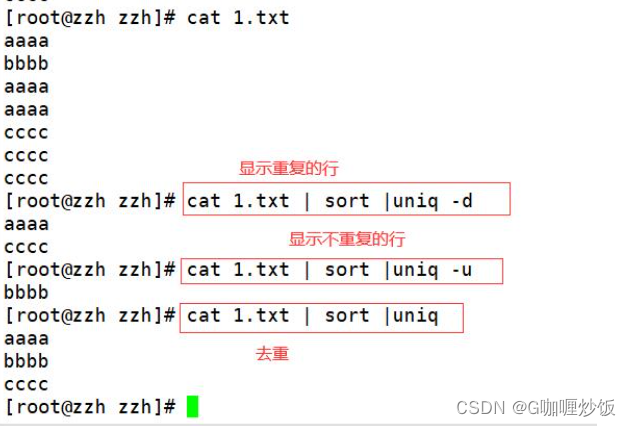
Common gadgets of Shell (sort, uniq, tr, cut)
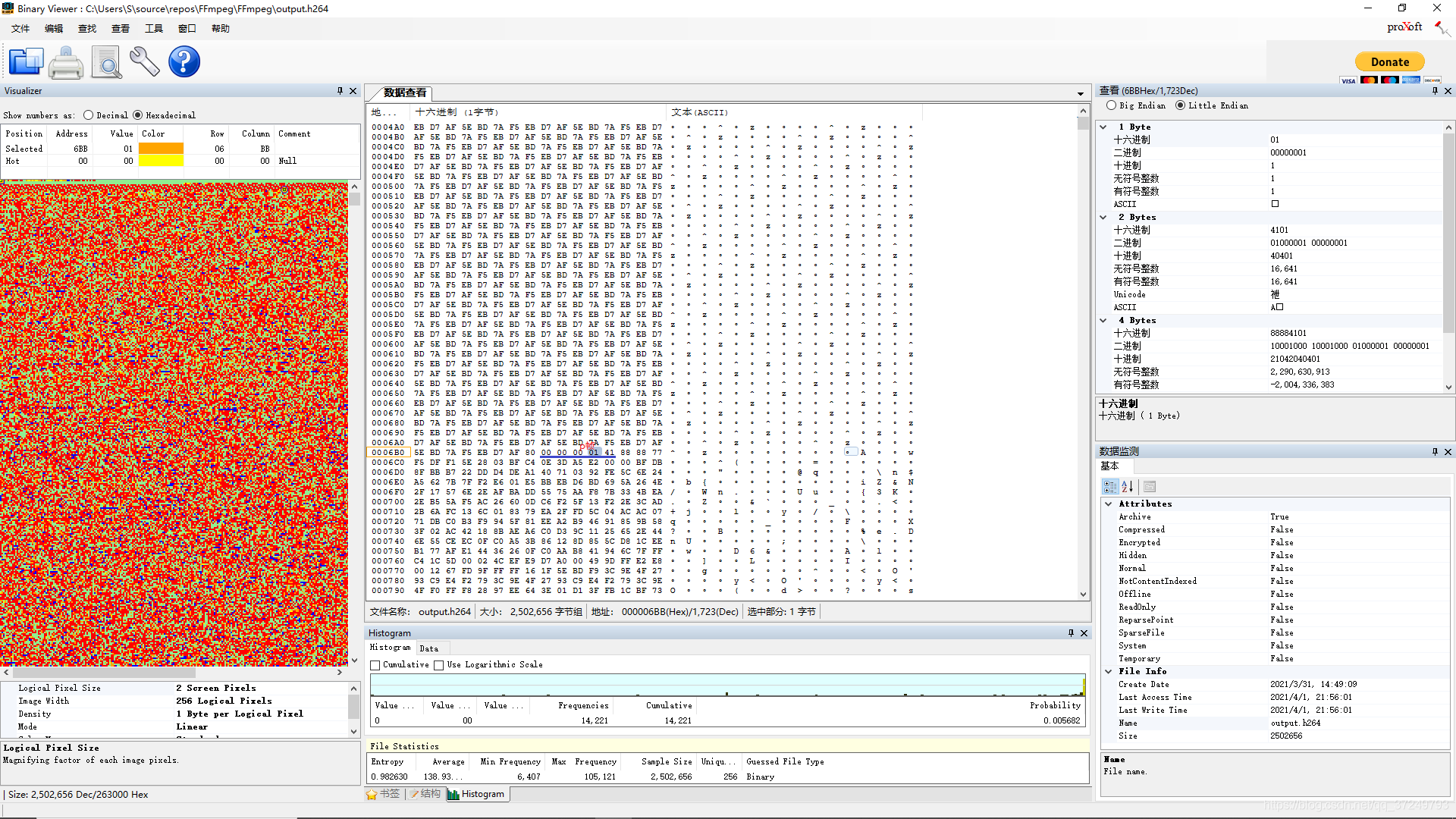
h264 protocol
Customize VIEW to realize in-app message reminder to rotate up and down

中科院打脸谷歌:普通电脑追上量子优越性,几小时搞定原本要一万年的计算...

脱光衣服待着就能减肥,当真有这好事?
win10编译x264库(也有生成好的lib文件)
Simple understanding of ThreadLocal

告别手摇织布机的AI时代
随机推荐
链表噩梦之一?5000多字带你弄清它的来龙去脉
Flutter入门进阶之旅(六)Layout Widget
Glory to the Blue Yonder, speeds up the strategic growth
Two minutes recording can pass by second language!The volcano how to practice and become voice tone reproduction technology?
redis库没法引入
在北极都可以穿短袖了,温度飙升至32.5℃
Flutter入门进阶之旅(三)Text Widgets
WeChat Mini Program Payment and Refund Overall Process
Win10 compiles the x264 library (there are also generated lib files)
Apexsqlrecover cannot connect to database
#Internet of Things essay#Xiaoxiong pie equipment development actual combat
Flutter Getting Started and Advanced Tour (2) Hello Flutter
放下手机吧:实验表明花20分钟思考和上网冲浪同样快乐
内网穿透工具ngrok使用教程
全面了解什么是TPS、QPS以及两者的区别
AQS同步组件-FutureTask解析和用例
【HCIP持续更新】IS-IS协议原理与配置
太卷了... 腾讯一面被问到内存满了,会发生什么?
微信小程序支付及退款整体流程
Batch大小不一定是2的n次幂!ML资深学者最新结论