当前位置:网站首页>多目标追踪——拓展卡尔曼滤波(EKF)
多目标追踪——拓展卡尔曼滤波(EKF)
2022-04-22 09:42:00 【昵称不能为——】
Reference:
示例1:https://github.com/smartleizi/KalmanFilter-Demo/blob/master/Kalman.m
示例2:https://blog.csdn.net/weixin_46136963/article/details/110142993
示例3:https://www.mathworks.com/help/fusion/ug/extended-kalman-filters.html
不讲原理,只给实例。EKF状态转换关系如下:

示例1:匀速直线运动,观测值为位置X
clc;clear;
T = 1:1:100; %时间
trueX=(1:2:200); %真实值
figure;%绘图
plot(T,trueX,"r",DisplayName="True Trajectory");
noise=1*randn(1,100); %均值为0,方差为1,生成100个误差项
Z=trueX+noise; %模拟的实际观测值
X=[110;110]; %随机设置的初始状态 X=[位置;速度]
P=[100 0;0 100]; %状态协方差矩阵,如果初始状态不可信,那么协方差矩阵越大越好
F=[1 1;0 1]; %状态转移矩阵
Q=[0.0001,0;0 , 0.0001]; %状态转移协方差矩阵
H=[1,0];%传感器提供的观测矩阵
R=1;%传感器的观测噪声协方差矩阵
%% 卡尔曼滤波
X_est = zeros(1,100);
for i = 1:100 %迭代次数
X_ = F*X;%基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q;%更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
K = P_*H'/(H*P_*H'+R); %这里省了计算S的过程,S=inv(H*P_*H'+R);
%% 更新
X = X_+K*(Z(i)-H*X_);% 得到当前状态的最优化估算值 增益乘以残差
P = (eye(2)-K*H)*P_;%更新K状态的协方差
X_est(i) = X(1);%保存
end
hold on;
plot(T,X_est,"g",DisplayName="Estimate Trajectory");
legend(Location="northwest");
%计算误差
figure;
plot(T, trueX-X_est,"g",DisplayName="true-est");
legend(Location="northeast");
结果: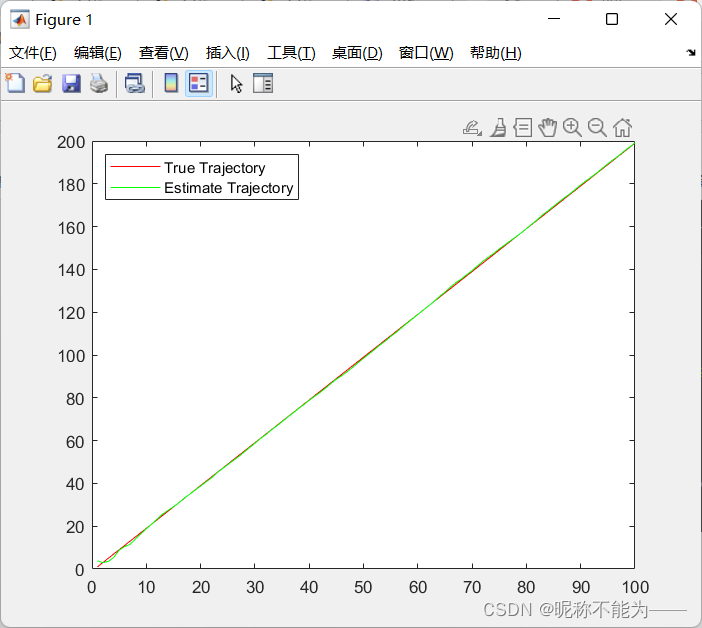

示例1变体:匀速直线运动,观测值为位置X和速度Vx
clc;clear;
T = 1:1:100; %时间
trueX=zeros(2,100); %真实值
trueX(:,1) = [1;2];
processNoise = diag([0.01,0.01]); %真实过程噪声,该值未知,此处用模拟替代
Z=zeros(2,100); %观测值
measureNoise=diag([100,100]); %真实量测噪声,该值未知,此处用模拟替代
%%生成真实值与量测值
F=[1 1;
0 1]; %真实的状态转移矩阵,该值未知
for i = 2:length(Z)
if i ~= 1
trueX(:,i) = F*trueX(:,i-1) + sqrt(processNoise)*randn(2,1);
end
Z(:,i) = trueX(:,i)+ sqrt(measureNoise)*randn(2,1);
end
%%画图
figure;
plot(T,trueX(1,:),"r",DisplayName="True Trajectory");
xlabel("t (s)");
ylabel("x (m)");
title("Trajectory");
X=[50;1]; %初始状态 X=[位置;速度],随机设置,可思考该参数有何影响?
P=[100 0;
0 100]; %状态协方差矩阵,随机设置,可思考该参数有何影响?
F=[1 1;
0 1]; %状态转移矩阵,根据运动学模型设置,可思考该参数有何影响?
Q=processNoise; %状态转移协方差矩阵,该值通过手动设定,设定的值与真实过程噪声越接近,效果越好,简单起见设置为真实过程噪声的值,有兴趣的同学可以更改这个参数试试
H=diag([1,1]); %传感器提供的观测矩阵
R=measureNoise; %传感器的观测噪声协方差矩阵,该值通过手动设定,设定的值与真实过程噪声越接近,效果越好,简单起见设置为真实过程噪声的值,有兴趣的同学可以更改这个参数试试
%% 卡尔曼滤波
X_est = zeros(1,100);
for i = 1:100 %迭代次数
X_ = F*X; %基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q; %更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
K = P_*H'/(H*P_*H'+R);
%% 更新
X = X_+K*(Z(:,i)-H*X_); %得到当前状态的最优化估算值 增益乘以残差
P = (eye(2)-K*H)*P_; %更新K状态的协方差
X_est(i) = X(1);
end
hold on;
plot(T,X_est,"g",DisplayName="Estimate Trajectory");
legend(Location="northwest");
%计算误差
figure;
plot(T, trueX(1,:)-X_est,"g",DisplayName="real-est");
legend(Location="northeast");
结果:


示例2:非线性运动,大家可以参考链接。
示例3:matlab官方EKF例子,二维平面下物体匀速直线运动,观测值为角度angle和距离range
clc;clear;
tic;
rng(2022); % For repeatable results
dt = 0.2; % seconds
simTime = 20; % seconds
tspan = 0:dt:simTime;
trueInitialState = [30; 1; 40; 1]; % [x;vx;y;vy]
initialCovariance = diag([100,1e3,100,1e3]);
processNoise = diag([0; .01; 0; .01]); % Process noise matrix
measureNoise = diag([2e-6;1]); % Measurement noise matrix. Units are m^2 and rad^2.
numSteps = length(tspan);
trueStates = NaN(4,numSteps);
trueStates(:,1) = trueInitialState;
estimateStates = NaN(size(trueStates));
measurements = NaN(2,numSteps);
for i = 2:length(tspan)
if i ~= 1
trueStates(:,i) = stateModel(trueStates(:,i-1),dt) + sqrt(processNoise)*randn(4,1);
end
measurements(:,i) = measureModel(trueStates(:,i)) + sqrt(measureNoise)*randn(2,1);
end
figure(1)
plot(trueStates(1,1),trueStates(3,1),"r*",DisplayName="Initial Truth")
hold on
plot(trueStates(1,:),trueStates(3,:),"r",DisplayName="True Trajectory")
xlabel("x (m)")
ylabel("y (m)")
title("True Trajectory")
axis square
figure(2)
subplot(2,1,1)
plot(tspan,measurements(1,:)*180/pi)
xlabel("time (s)")
ylabel("angle (deg)")
title("Angle and Range")
subplot(2,1,2)
plot(tspan,measurements(2,:))
xlabel("time (s)")
ylabel("range (m)")
filter = trackingEKF(State=[35; 0; 45; 0],StateCovariance=initialCovariance, ...
StateTransitionFcn=@stateModel,ProcessNoise=processNoise, ...
MeasurementFcn=@measureModel,MeasurementNoise=measureNoise);
estimateStates(:,1) = filter.State;
for i=2:length(tspan)
predict(filter,dt);
estimateStates(:,i) = correct(filter,measurements(:,i));
end
figure(1)
plot(estimateStates(1,1),estimateStates(3,1),"g*",DisplayName="Initial Estimate")
plot(estimateStates(1,:),estimateStates(3,:),"g",DisplayName="Estimated Trajectory")
legend(Location="northwest")
title("True Trajectory vs Estimated Trajectory")
toc;
disp(["运行时间:", num2str(toc)]);
function stateNext = stateModel(state,dt)
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
stateNext = F*state;
end
function z = measureModel(state)
angle = atan(state(3)/state(1));
range = norm([state(1) state(3)]);
z = [angle;range];
end
结果:


在这个官方示例中,调用了集成好的 trackingEKF对象,这样虽然调用起来比较方便,但不利于原理的理解,现在考虑如何自己重写一下该示例。因为该运动为匀速直线运动,求一下状态转移矩阵的一阶雅可比矩阵,结果为F。现在只需要求观测矩阵的一阶雅可比矩阵即可。首先,有如下公式
angle = arctan(Y/X);
range = sqrt(XX+YY);
所以,观测矩阵的一阶雅可比矩阵为:
H = [∂angle/∂X, ∂angle/∂Vx, ∂angle/∂yY ∂angle/∂Vy; = [∂angle/∂X, 0, ∂angle/∂Y, 0;
∂range/∂X, ∂range/∂Vx, ∂range/∂Y, ∂range/∂Vy]; ∂range/∂x, 0, ∂range/∂y, 0];
对应的传感器观测噪声协方差矩阵:
R = [2e-6, 0;
0, 1];
求出这两项以后,按照示例1的逻辑来写就行了。代码如下:
clc;clear;
tic;
rng(2022); % For repeatable results
dt = 0.2; % seconds
simTime = 20; % seconds
tspan = 0:dt:simTime;
trueInitialState = [30; 1; 40; 1]; % [x;vx;y;vy]
initialCovariance = diag([100,1e3,100,1e3]);
processNoise = diag([0; 1e-2; 0; 1e-2]); % Process noise matrix
measureNoise = diag([2e-6;1]); % Measurement noise matrix. Units are m^2 and rad^2.
numSteps = length(tspan);
trueStates = NaN(4,numSteps);
trueStates(:,1) = trueInitialState;
estimateStates = NaN(size(trueStates));
measurements = NaN(2,numSteps);
for i = 2:length(tspan)
if i ~= 1
trueStates(:,i) = stateModel(trueStates(:,i-1),dt) + sqrt(processNoise)*randn(4,1);
end
measurements(:,i) = measureModel(trueStates(:,i)) + sqrt(measureNoise)*randn(2,1);
end
figure(1)
plot(trueStates(1,1),trueStates(3,1),"r*",DisplayName="Initial Truth")
hold on
plot(trueStates(1,:),trueStates(3,:),"r",DisplayName="True Trajectory")
xlabel("x (m)")
ylabel("y (m)")
title("True Trajectory")
axis square
%%filter
X = [35; 0; 45; 0];
P = initialCovariance;
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
Q = processNoise;
syms x y vx vy;
jacobianH = jacobian([atan((y)/(x));norm([x y])], [x, vx, y, vy]);
R = measureNoise;
estimateStates(:,1) = X;
for i=2:length(tspan)
X_ = F*X;%基于上一状态预测当前状态 X_为t时刻状态预测(这里没有控制)
P_ = F*P*F'+Q;%更新协方差 Q系统过程的协方差
%% 计算卡尔曼增益
H = double(subs(jacobianH,{
x,vx,y,vy},{
X_(1),X_(2),X_(3),X_(4)}));
K = P_*H'/(H*P_*H'+R);
%% 更新
X = X_+K*(measurements(:,i)-measureModel(X_));% 得到当前状态的最优化估算值 增益乘以残差
P = (eye(4)-K*H)*P_;%更新K状态的协方差
estimateStates(:,i) = X;
end
figure(1)
plot(estimateStates(1,1),estimateStates(3,1),"g*",DisplayName="Initial Estimate")
plot(estimateStates(1,:),estimateStates(3,:),"g",DisplayName="Estimated Trajectory")
legend(Location="northwest")
title("True Trajectory vs Estimated Trajectory")
toc;
disp(["运行时间:", num2str(toc)]);
function stateNext = stateModel(state,dt)
F = [1 dt 0 0;
0 1 0 0;
0 0 1 dt;
0 0 0 1];
stateNext = F*state;
end
function z = measureModel(state)
angle = atan(state(3)/state(1));
range = norm([state(1) state(3)]);
z = [angle;range];
end
结果:

版权声明
本文为[昵称不能为——]所创,转载请带上原文链接,感谢
https://blog.csdn.net/weixin_43129599/article/details/124297605
边栏推荐
- Analysis of the factors affecting the switching speed of MOS transistor Kia MOS transistor
- server 2019服务器可用内存是实际内存的一半
- 2022年危险化学品经营单位安全管理人员上岗证题库及在线模拟考试
- MySQL multi instance installation method I
- L2-030 冰岛人 (25 分) (最近公共祖先 思维
- Command ‘yum‘ not found, but can be installed with: apt install yum
- LC301. 删除无效的括号
- QT AxObject库的简单操作
- 超越iTerm! 号称下一代终端神器,功能贼强大!
- 深度学习遥感场景分类数据集整理
猜你喜欢
超越iTerm! 号称下一代终端神器,功能贼强大!

VLAN - virtual LAN overview

Tensorflow Experiment 4 -- Boston house price forecast

WEB应用扫码获取浙政钉用户信息

Sorting and publishing of remote sensing image segmentation data set

GS waveform analysis of depth resolved MOS transistor Kia MOS transistor

MOS tube and MOS tube driving circuit case analysis - Kia MOS tube

QT event filter instance
浙政钉扫码登录
![[C language advanced level 10 -- character and string functions and their simulation implementation (1)]](/img/9b/7fab7122e697bccd7d0d38ce3f30ee.png)
[C language advanced level 10 -- character and string functions and their simulation implementation (1)]
随机推荐
Aardio - [library] webp picture conversion
Development of esp-01s in Arduino (1)
How to calculate the maximum switching frequency of MOS tube - Kia MOS tube
支持AUTOSAR Classic以及Adaptive平台的DEXT诊断数据库
Basic concepts of radiometry
etcd 如何实现同步监听
Analysis of the factors affecting the switching speed of MOS transistor Kia MOS transistor
Kernel pwn 基础教程之 Heap Overflow
2022低压电工考试题及答案
2022起重机司机(限桥式起重机)考试题库及在线模拟考试
SQL operator
解析功率mos管为何会被烧毁-KIA MOS管
L3-004 tumor diagnosis (30 points) (3D BFS)
SQL relational database management system
getimagesize()函数获取图片宽高取反
server 2019服务器可用内存是实际内存的一半
source_insight新建工程以及在整个文档中搜索某个变量或者函数的方法
QTabelWidget实例
P型MOS管开关电路及工作原理详解-KIA MOS管
2022年危险化学品经营单位安全管理人员上岗证题库及在线模拟考试