当前位置:网站首页>arm-4-裸板开发
arm-4-裸板开发
2022-08-09 23:01:00 【Btobk】
程序链接(运行)地址和程序地址
ld文件就是链接文件,链接地址是指程序运行的地址在哪里(运行的时候,放到内存里去运行),程序地址是指程序储存在哪里
在芯片手册中找到gpio,控制地址,设置接口,最核心的就是start.s文件
make – 烧录到sd卡(自带的工具) – evm设置 – 上电
使用minitool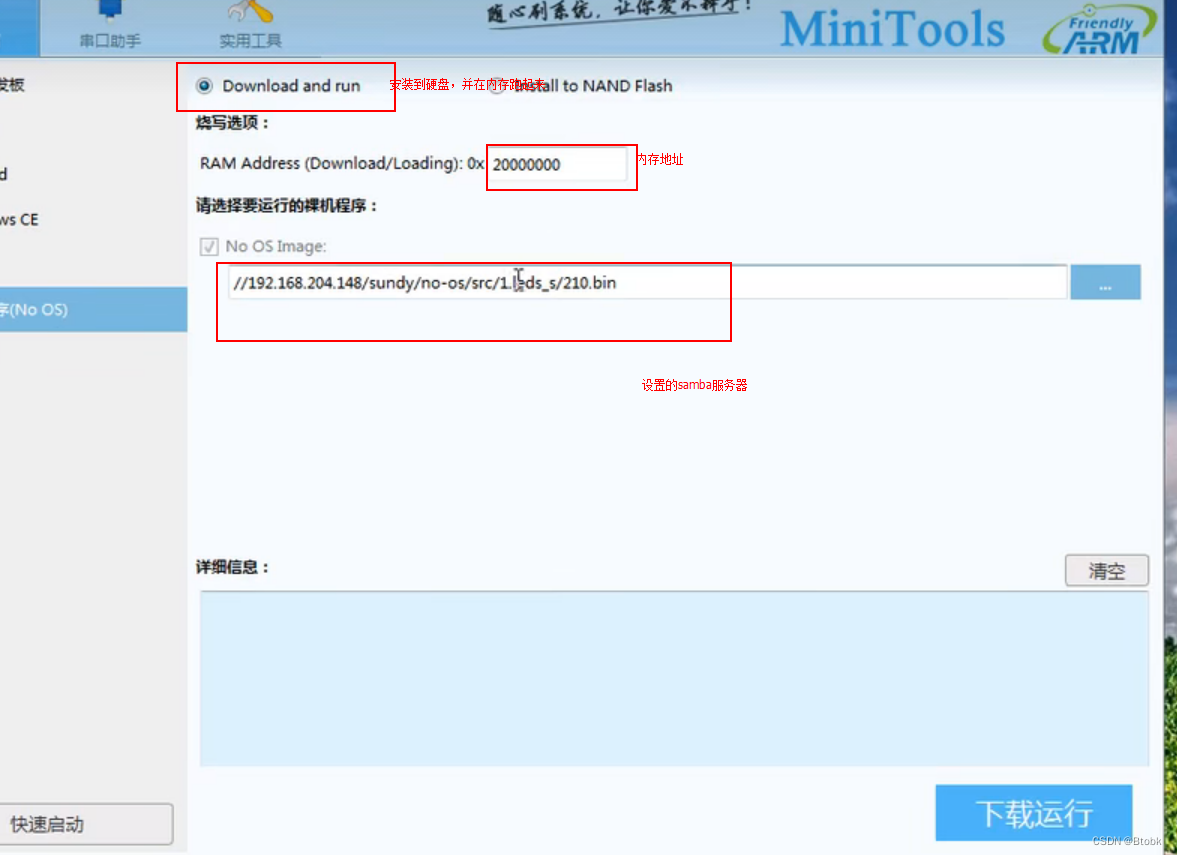
200000是链接地址
使用sd卡,可以将程序拷贝到0x0000,没有superboot也可以运行
使用minitool,可以将程序拷贝到0x2000,必须要有superboot才可以运行
那么其中到底发生了什么事情呢,为什么他们两个有差异
arm启动顺序
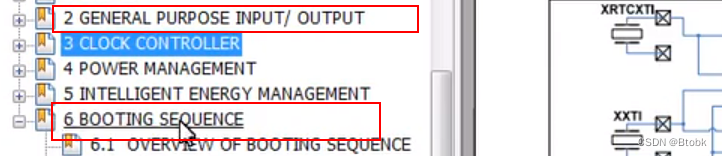
1.看文档
2.看文档,芯片手册-overview
dmz:隔离区
sfrs;特殊寄存器

这块叫什么呢?
这块叫boot area 启动区,裸板程序就在这里,因为irom里面有一块固化代码,包含了看门狗等,这也就是为什么裸板不用看门狗,把程序放在这里,他就直接跑起来了
外设总线寻址地址
控制器–onenand

所以有boot就烧到20000,没有就烧到0000(起始地址)
看看启动了
gpio和boot启动
rom里面的固有程序会把硬盘中的第一段bootloader程序(16k校验)搬到芯片内部iram,如果运行成功,就搬第二段,全成功了就启动os,再把os转到内存里

1.启动irom上面的code
2.搬bl1到iram
3.搬bl2到ram
4.bl2启动os kernel
5…os kernel 到dram
裸板程序是在iram上运行的
superboot是在第6步完成,superboot实际上帮忙完成了2,3两步骤

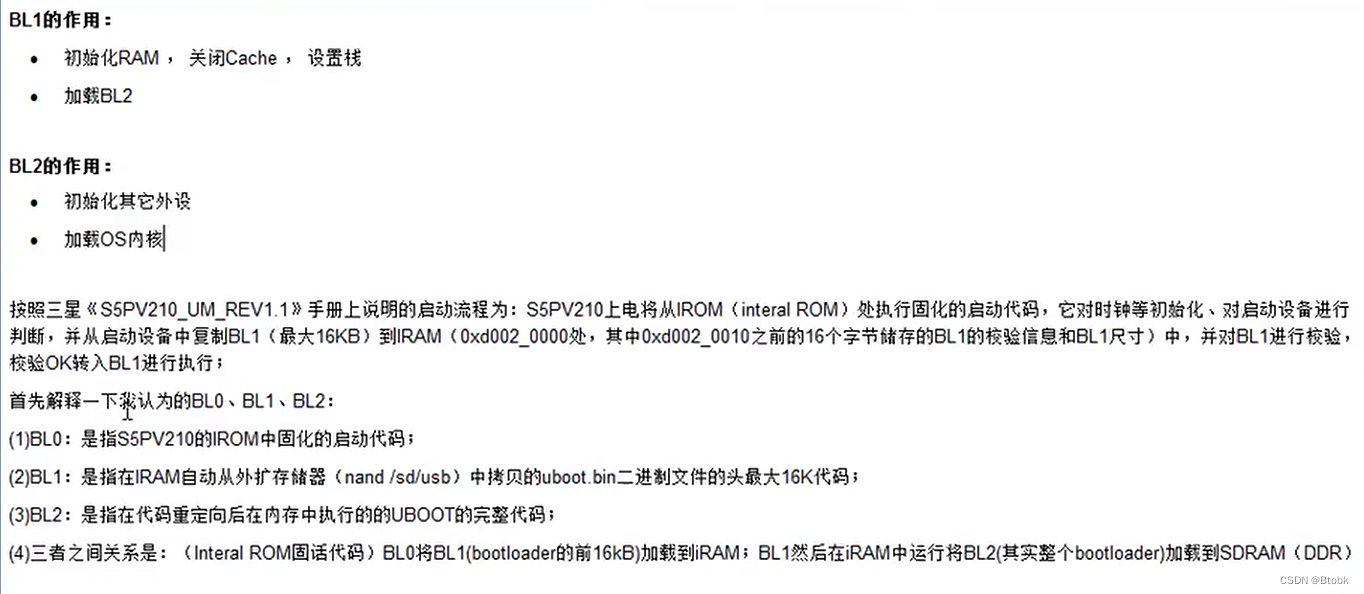

因为有一个16k的偏移,所以才会是D002001
GPIO
怎么操作GPIO呢,那我们的led灯来举例:
打开芯片手册和电路图,在电路图里面搜索led,在芯片手册里面搜索
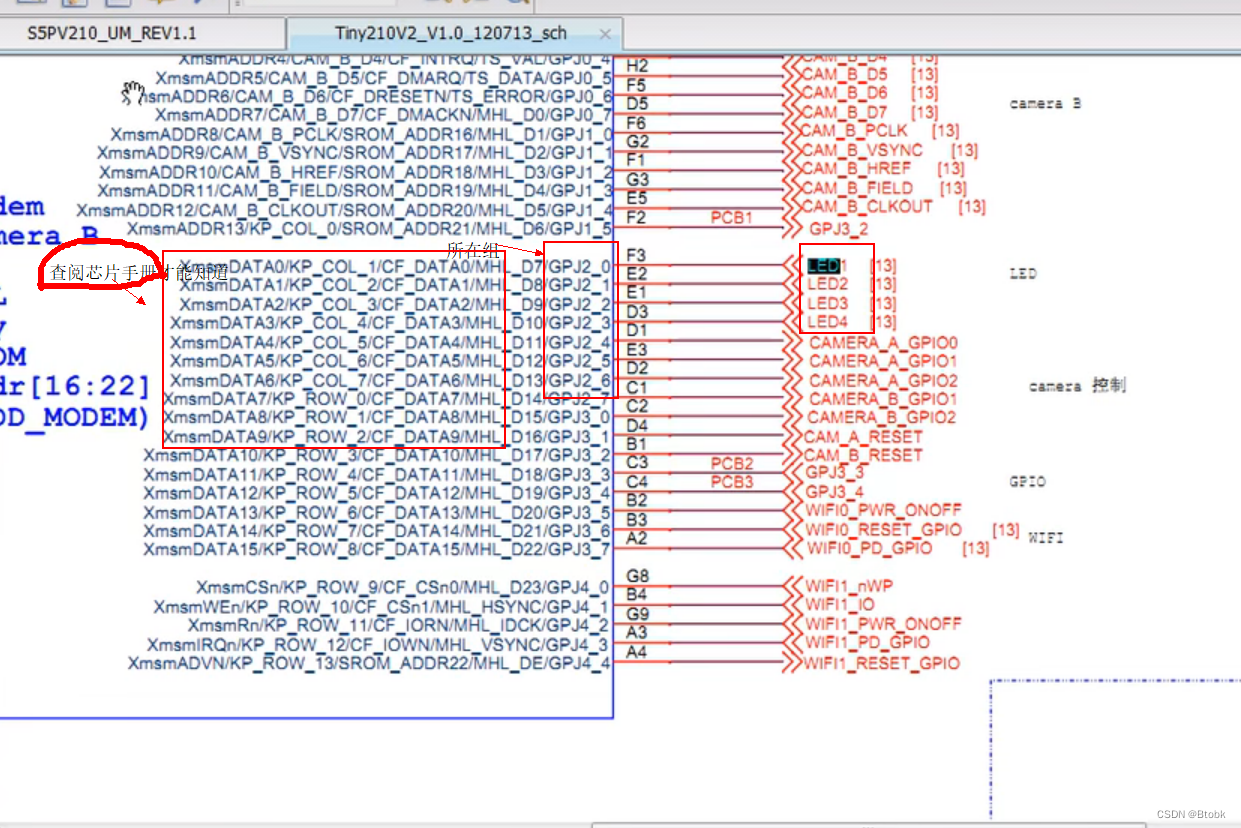
在芯片手册中可以找到组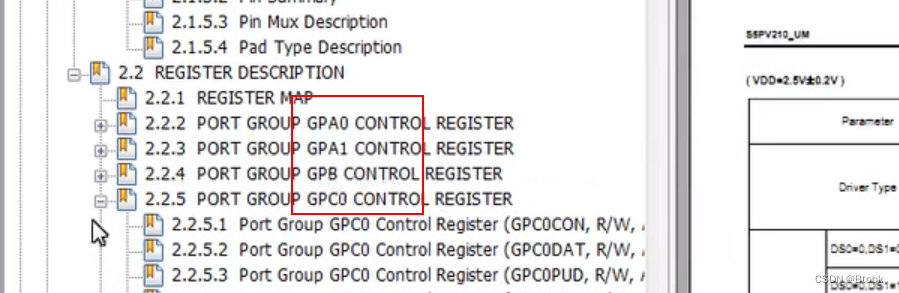
在芯片手册中找到位置
寄存器有8个,每个4位,也就是总共要有21位
灯亮的地址是0001
四个灯要亮就是0000 0000 0000 0000 0001 0001 0001 0001
转换成16进制就是0x0000 1111
我们看一下,他的程序储存在哪里
储存在这里,sfrs特殊寄存器里
我们知道了启动位置之后,就可以开始实验:
实验目标:
1.使用汇编来进行裸板程序点亮led
2.用c完成实验一
3.通过key来控制led的点亮
4.优化程序,makefile,控制看门狗和cache缓存
1.使用汇编来进行裸板程序点亮led
需要做:
1.把0xE0200280设置成0x00001111的开灯模式
2.把0xE0200284设置成0x00, 所有位设置成0,低电平
mov r0,0xE0200280 这样是不行的,因为mov是只能操纵寄存器内部的,不能涉及到外部的存储器
ldr可以用于内部和外部寄存器的交换
ldr和mov的区别: https://blog.csdn.net/heybeaman/article/details/79236462
https://www.cnblogs.com/zhiminyu/p/15629073.html
ldr r0,#0xE0200280 这个意思是吧#0xE0200280里面的值读取到r0
所以也不行
改成:
ldr r0 ,= 0xE0200280 //这个意思就是把0xE0200280赋值到r0
mov r1 ,#0x00001111
str r1,[r0] //把r1的值存到r0的地址里面去
完整代码:
ldr r0 ,= 0xE0200284
mov r1 , 0x000011111
str r1,[r0]

编译make文件—生成bin文件—基于汇编文件
编译,链接参见链接文件,去头(binary是二进制的意思)
烧录bin文件,连接开发板,打开minitool和开发板
2.使用c语言
凡是和寄存器相关的地址,都要用到volatile,防止被修改优化
1.#define JPGCON ( * (volatile unsigned long * )0xE0200280)
(volatile unsigned long * )0xE0200280 指向地址
* (volatile unsigned long * )0xE0200280 指向地址的值
2.#define JPGDAT ( * (volatile unsigned long * )0xE0200284)
#define JPGCON ( * (volatile unsigned long * )0xE0200280)
#define JPGDAT ( * (volatile unsigned long * )0xE0200284)
int main ()
{
JPGCON = 0x00001111;
JPGDAT = 0x00;
return 0;
}
修改汇编代码
源代码:
.text
.global _start
_start:
LDR R0 ,= 0xE0200280
MOV R1 , 0x00001111
STR R1,[R0]
LDR R0 ,= 0xE0200284
MOV R1 , 0x00
STR R1,[R0]
`loop:
B loop
修改后的代码
.text
.global _start
_start:
BL main
B loop
/* LDR R0 ,= 0xE0200280 MOV R1 , 0x00001111 STR R1,[R0] LDR R0 ,= 0xE0200284 MOV R1 , 0x00 STR R1,[R0] `loop: B loop /* 在makefile中加入c的东西:

make,烧录
3.制作一个蜂鸣器的程序

汇编代码
.text
.global _start
_start:
BL main
_loop:
B _loop
电路图找到蜂鸣器–


通过引脚在芯片手册找到io口
在芯片手册,找到控制寄存器以及数字寄存器地址值
完善下思路
开始编写main。c
#define GPD0CON ( * (volatile unsigned long * )0xE020_00A0)
#define GPD0DAT ( * (volatile unsigned long * )0xE020_00A4)
int main ()
{
GPD0CON |= 1<<0; //把引脚变成输出
while(1) //死循环,一直响
{
buzzer_on(); //控制电平高
delay(0x5000); //延迟
buzzer_off(); //控制低电平
delay(0x5000); //延迟
}
return 0;
}
void buzzer_on(void)
{
GPD0DAT |= 1<<0 ; //1<<0的意思是1左移0位 *1<<2 = 100
//|=就是或者,只要有一位是1,就是1,这里的意思是,把最后一位变成1,为什么不直接是1呢,因为这样子就可以指定哪一位是1
}
void buzzer_off(void)
{
GPD0DAT &= ~(1<<0) ;~取反,1就是0
}
void delay(unsigned long count)
{
volatitle unsigned long i = count;
while (i--);
}
``
makefile
然后再烧写运行
使用button控制
找到button的引脚,再找到值,在找到地址

在芯片手册里面找到
#define GPD0CON ( * (volatile unsigned long * )0xE020_00A0)
#define GPD0DAT ( * (volatile unsigned long * )0xE020_00A4)
#define GPH0CON ( * (volatile unsigned long * )0xE020_0C40)
#define GPH0DAT ( * (volatile unsigned long * )0xE020_0C44)
int main ()
{
GPD0CON |= 1<<0; //把引脚变成输出
GPH0CON &= ~(1<<0)
while(1) //死循环,一直响
{
if(GPH0DAT &(1<<0))
buzzer_off();
else
buzzer_on();
}
return 0;
}
void buzzer_on(void)
{
GPD0DAT |= 1<<0 ; //1<<0的意思是1左移0位 *1<<2 = 100
//|=就是或者,只要有一位是1,就是1,这里的意思是,把最后一位变成1,为什么不直接是1呢,因为这样子就可以指定哪一位是1
}
void buzzer_off(void)
{
GPD0DAT &= ~(1<<0) ;~取反,1就是0
}
void delay(unsigned long count)
{
volatitle unsigned long i = count;
while (i--);
}
修改makefile
特别注意的事情是,因为死循环太占用资源而且不方便,所以通常不采用这种轮询的方式,而是采用中断的方式
边栏推荐
- CAD 绘制圆角处理
- LiveData : Transformations.map and Transformations.switchMap usage
- KingbaseGIS Jin Cang database using manual (6.3. Geometric object creation function)
- 【集训DAY4】异或【字典树】
- 南大通用数据库-Gbase-8a-学习-04-部署分布式集群
- 【JZOF】32从上往下打印二叉树
- 第十二,十三章 mysql数据类型,视图的课后练习
- New window Display Agreement
- SRv6 performance measurement
- 分布式数据库难题(二):数据复制
猜你喜欢

多商户商城系统功能拆解24讲-平台端分销会员
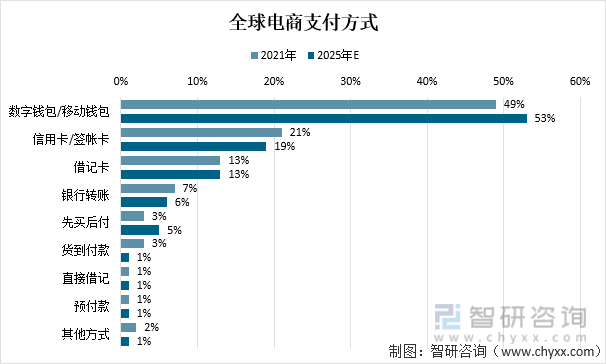
Digital wallets, red sea ecological rapid introduction of small programs can help capture device entry wisdom

上交所实时行情文件汇总
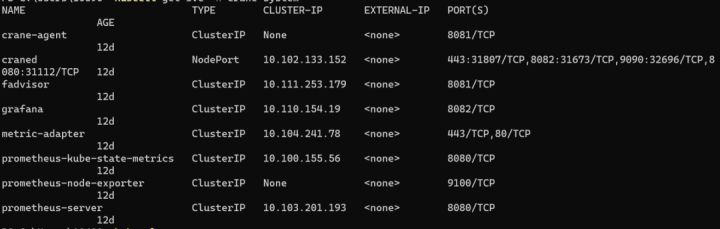
【云原生】一文讲透Kubevela addon如何添加腾讯Crane

go语言的并发原理(goroutine)

首席信息官如何将可持续性和技术结合起来
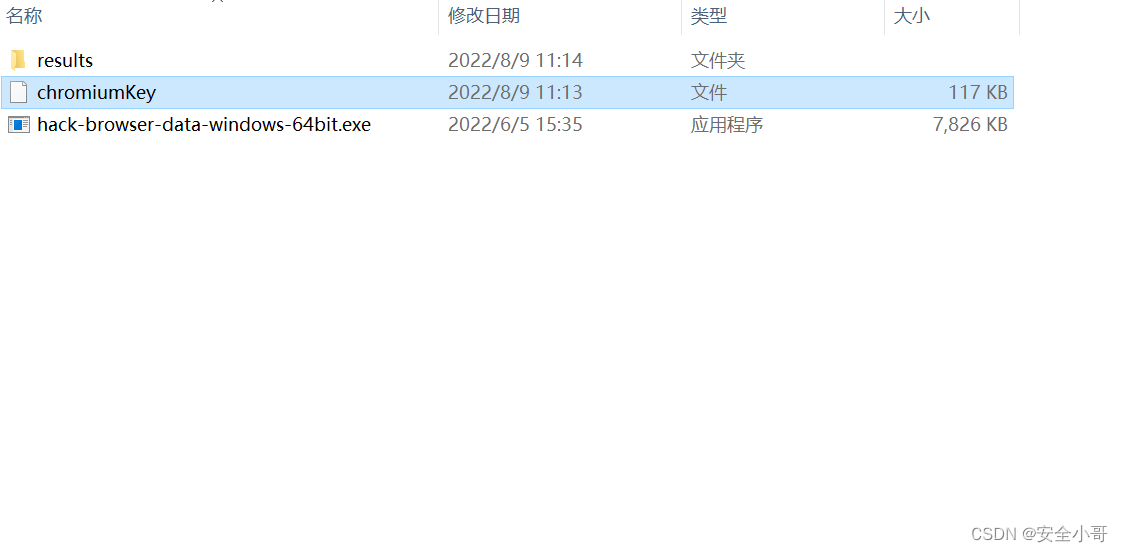
【渗透工具】浏览器数据导出工具
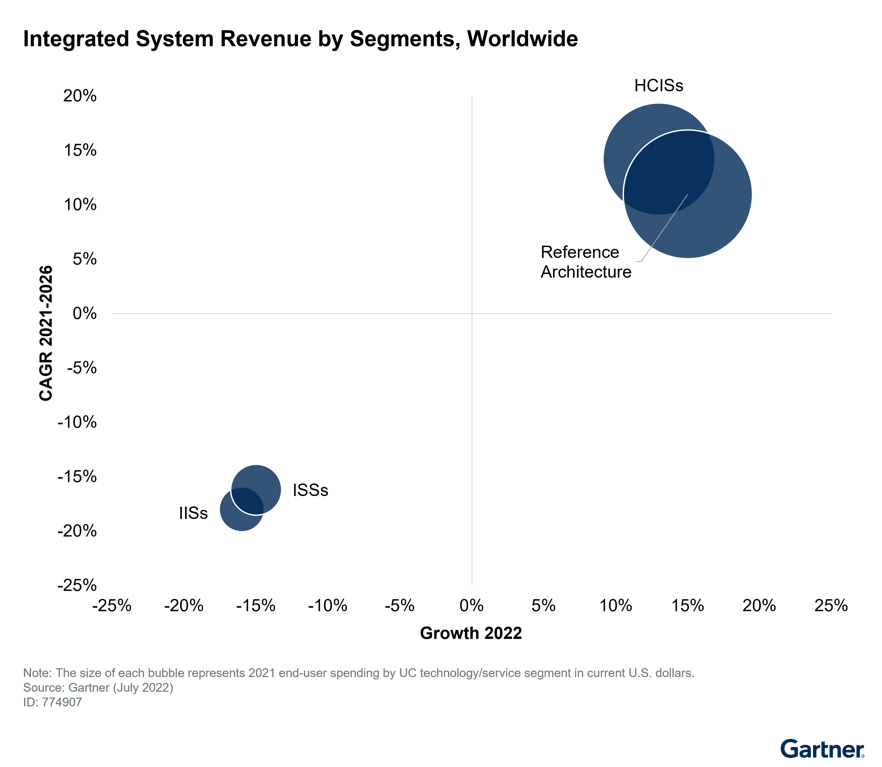
Gartner全球集成系统市场数据追踪,超融合市场增速第一
![[Interface Test] Decoding the request body string of the requests library](/img/99/82ef792dacd398a8a62dd94f235a91.png)
[Interface Test] Decoding the request body string of the requests library
信息系统项目管理师核心考点(六十四)信息安全基础知识重要概念
随机推荐
关于服务治理
go语言的并发原理(goroutine)
【诗歌】爱你就像爱生命
阿里云短信服务开通
Filament-Material 绘制基本图形
NTU General Database-Gbase-8a-Learning-04-Deploying Distributed Clusters
下班后用微信处理工作时发病身亡,法院判决:工伤!
【Infiltration tool】Browser data export tool
Golden Warehouse Database KingbaseGIS User Manual (6.4. Geometry Object Access Function)
A summary of 6 common tools for cross-border e-commerce
Golden Warehouse Database KingbaseGIS User Manual (6.5. Geometry Object Editing Function)
什么是服务治理
Sqlserver限制账户在哪些ip下才可以访问数据库
什么是平面文件数据库? 如何导入多种格式的文件:DSV、JSON、XML?
上交所实时行情文件汇总
In-depth understanding of multithreading (Part 1)
Dry goods!Towards robust test-time adaptation
Cmake 用法记录
【集训DAY5】堆箱子【数学】
基于ABP的AppUser对象扩展