当前位置:网站首页>PWM输出模块PCA9685
PWM输出模块PCA9685
2022-08-09 05:02:00 【lilei668】
1.该模块是由NXP公司研发的PWM输出模块
中文简介:
这是一个采用i2c通信 ,内置了PWM驱动器和一个时钟。这意味着,这将和TLC5940系列有很大不同。你不需要不断发送信号占用你的单片机!
它是5V的兼容,这意味着你还可以用3.3V单片机控制并且安全地驱动到6V输出(当你想控制白色或蓝色指示灯用3.4+正电压也是可以的)
6地址选择引脚使你可以把62个驱动板挂在单个i2c总线上,总共有992路PWM输出。那将是非常庞大的资源。
约1.6Khz可调频PWM输出
为步进电机准备输出12位分辨率,这意味着在60Hz的更新率能够达到4us分辨率
可配置的推拉输出或开路输出
输出使能引脚能够快速禁用所有输出
OE引脚一定要至低使能,或者直接接地。
特性:
(1)PCA9685芯片被包裹在小板的中央
(2)电源输入端子
(3) 绿色电源指示灯
(4) 在4组3针连接器中方便你一次插入16个伺服电机(伺服电机的插头稍宽于0.1",所以你可以放4对0.1"的接头)
(5) 接线板上输入的反向极性保护
(6)级联设计
(7)V+线上放置一个大电容(在某些场合你会需要) 外围输入最大电压取决于这个10V1000uf的电容
(8)所有PWM输出线上都放一个220欧姆系列电阻器来保护他们,并能轻易的驱动LED。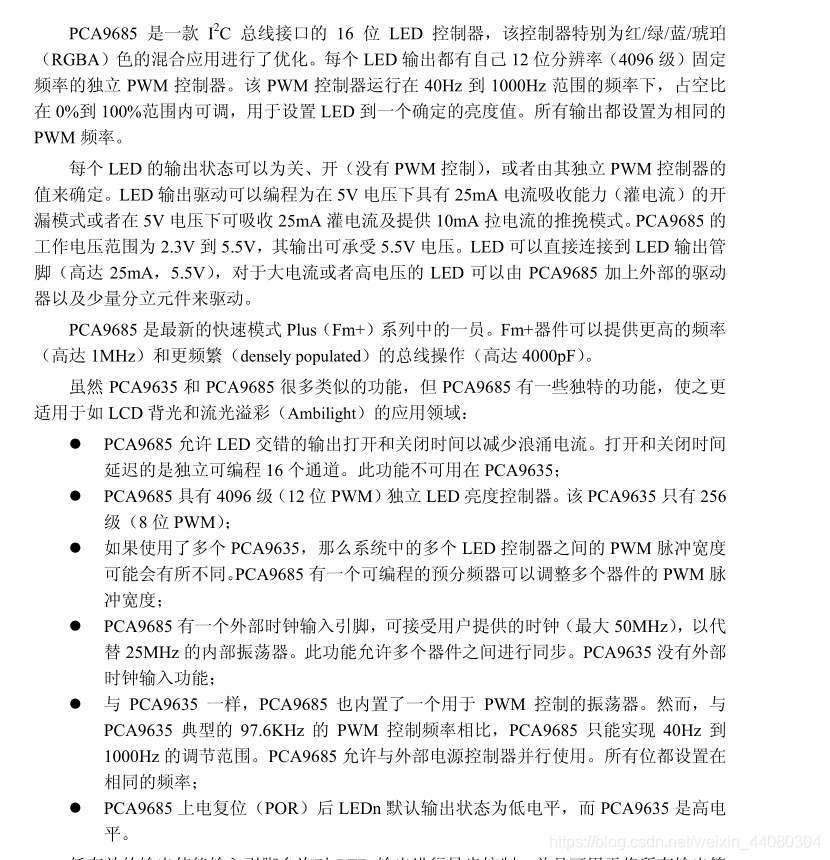
电路原理图如下:
从中文简介可知,该模块输出能力足够,完全能达到控制舵机的信号强度要求。
模块程序如下:
#include “pca9685.h”
#include “myiic.h”
#include “delay.h”
#include “math.h”
void pca_write(u8 adrr,u8 data)//向PCA写数据,adrrd地址,data数据
{
IIC_Start_Duoji();
IIC_Send_Byte_Duoji(pca_adrr);
IIC_Wait_Ack_Duoji();
IIC_Send_Byte_Duoji(adrr);
IIC_Wait_Ack_Duoji();
IIC_Send_Byte_Duoji(data);
IIC_Wait_Ack_Duoji();
IIC_Stop_Duoji();
}
u8 pca_read(u8 adrr)//从PCA读数据
{
u8 data;
IIC_Start_Duoji();
IIC_Send_Byte_Duoji(pca_adrr);
IIC_Wait_Ack_Duoji();
IIC_Send_Byte_Duoji(adrr);
IIC_Wait_Ack_Duoji();
IIC_Start_Duoji();
IIC_Send_Byte_Duoji(pca_adrr|0x01);
IIC_Wait_Ack_Duoji();
data=IIC_Read_Byte_Duoji(0);
IIC_Stop_Duoji();
return data;
}
void pca_setfreq(float freq)//设置PWM频率
{
u8 prescale,oldmode,newmode;
double prescaleval;
freq *= 0.92;
prescaleval = 25000000;
prescaleval /= 4096;
prescaleval /= freq;
prescaleval -= 1;
prescale =floor(prescaleval + 0.5f);
oldmode = pca_read(pca_mode1);
newmode = (oldmode&0x7F) | 0x10; // sleep
pca_write(pca_mode1, newmode); // go to sleep
pca_write(pca_pre, prescale); // set the prescaler
pca_write(pca_mode1, oldmode);
delay_ms(2);
pca_write(pca_mode1, oldmode | 0xa1);
}
void pca_setpwm(u8 num, u32 on, u32 off)
{
pca_write(LED0_ON_L+4num,on);
pca_write(LED0_ON_H+4num,on>>8);
pca_write(LED0_OFF_L+4num,off);
pca_write(LED0_OFF_H+4num,off>>8);
}
/num:舵机PWM输出引脚015,on:PWM上升计数值04096,off:PWM下降计数值0~4096
一个PWM周期分成4096份,由0开始+1计数,计到on时跳变为高电平,继续计数到off时
跳变为低电平,直到计满4096重新开始。所以当on不等于0时可作延时,当on等于0时,
off/4096的值就是PWM的占空比。/
/*
函数作用:初始化舵机驱动板
参数:1.PWM频率
2.初始化舵机角度
/
void PCA_MG9XX_Init(float hz,u8 angle)
{
u32 off=0;
IIC_Init_Duoji();
pca_write(pca_mode1,0x0);
pca_setfreq(hz);//设置PWM频率
off=(u32)(145+angle2.4);
pca_setpwm(0,0,off);pca_setpwm(1,0,off);pca_setpwm(2,0,off);pca_setpwm(3,0,off);
pca_setpwm(4,0,off);pca_setpwm(5,0,off);pca_setpwm(6,0,off);pca_setpwm(7,0,off);
pca_setpwm(8,0,off);pca_setpwm(9,0,off);pca_setpwm(10,0,off);pca_setpwm(11,0,off);
pca_setpwm(12,0,off);pca_setpwm(13,0,off);pca_setpwm(14,0,off);pca_setpwm(15,0,off);
delay_ms(500);
}
/*
函数作用:控制舵机转动;
参数:1.输出端口,可选0~15;
2.起始角度,可选0~180;
3.结束角度,可选0~180;
4.模式选择,0 表示函数内无延时,调用时需要在函数后另外加延时函数,且不可调速,第五个参数可填任意值;
1 表示函数内有延时,调用时不需要在函数后另外加延时函数,且不可调速,第五个参数可填任意值;
2 表示速度可调,第五个参数表示速度值;
5.速度,可填大于 0 的任意值,填 1 时速度最快,数值越大,速度越小;
注意事项:模式 0和1 的速度比模式 2 的最大速度大;
/
void PCA_MG9XX(u8 num,u8 start_angle,u8 end_angle,u8 mode,u8 speed)
{
u8 i;
u32 off=0;
switch(mode)
{
case 0:
off=(u32)(158+end_angle2.2);
pca_setpwm(num,0,off);
break;
case 1:
off=(u32)(158+end_angle2.2);
pca_setpwm(num,0,off);
if(end_angle>start_angle){delay_ms((u16)((end_angle-start_angle)2.7));}
else{delay_ms((u16)((start_angle-end_angle)2.7));}
break;
case 2:
if(end_angle>start_angle)
{
for(i=start_angle;i<=end_angle;i++)
{
off=(u32)(158+i2.2);
pca_setpwm(num,0,off);
delay_ms(2);
delay_us(speed250);
}
}
else if(start_angle>end_angle)
{
for(i=start_angle;i>=end_angle;i–)
{
off=(u32)(158+i2.2);
pca_setpwm(num,0,off);
delay_ms(2);
delay_us(speed*250);
}
}
break;
}
}
因为这次需要挂载多个IIC模块,所有对IIC程序进行了修改,myiic.c:
#include “myiic.h”
#include “delay.h”
#include “main.h”
#include “stm32f1xx_hal.h”
#include “dma.h”
#include “tim.h”
#include “usart.h”
#include “gpio.h”
//初始化IIC
void IIC_Init_Duoji(void)
{
GPIO_SetBits(GPIOC,GPIO_PIN_11|GPIO_PIN_12); //PB6,PB7 输出高
}
//产生IIC起始信号
void IIC_Start_Duoji(void)
{
SDA_OUT_Duoji(); //sda线输出
IIC_SDA_Duoji=1;
IIC_SCL_Duoji=1;
delay_us(4);
IIC_SDA_Duoji=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL_Duoji=0;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop_Duoji(void)
{
SDA_OUT_Duoji();//sda线输出
IIC_SCL_Duoji=0;
IIC_SDA_Duoji=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL_Duoji=1;
IIC_SDA_Duoji=1;//发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack_Duoji(void)
{
u8 ucErrTime=0;
SDA_IN_Duoji(); //SDA设置为输入
IIC_SDA_Duoji=1;delay_us(1);
IIC_SCL_Duoji=1;delay_us(1);
while(READ_SDA_Duoji)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop_Duoji();
return 1;
}
}
IIC_SCL_Duoji=0;//时钟输出0
return 0;
}
//产生ACK应答
void IIC_Ack_Duoji(void)
{
IIC_SCL_Duoji=0;
SDA_OUT_Duoji();
IIC_SDA_Duoji=0;
delay_us(2);
IIC_SCL_Duoji=1;
delay_us(2);
IIC_SCL_Duoji=0;
}
//不产生ACK应答
void IIC_NAck_Duoji(void)
{
IIC_SCL_Duoji=0;
SDA_OUT_Duoji();
IIC_SDA_Duoji=1;
delay_us(2);
IIC_SCL_Duoji=1;
delay_us(2);
IIC_SCL_Duoji=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte_Duoji(u8 txd)
{
u8 t;
SDA_OUT_Duoji();
IIC_SCL_Duoji=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA_Duoji=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //对TEA5767这三个延时都是必须的
IIC_SCL_Duoji=1;
delay_us(2);
IIC_SCL_Duoji=0;
delay_us(2);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte_Duoji(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN_Duoji();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL_Duoji=0;
delay_us(2);
IIC_SCL_Duoji=1;
receive<<=1;
if(READ_SDA_Duoji)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck_Duoji();//发送nACK
else
IIC_Ack_Duoji(); //发送ACK
return receive;
}
myiic.h程序如下:
#ifndef __MYIIC_H
#define __MYIIC_H
#include “sys.h”
/以下是舵机控制板的IIC驱动底层代码/
//IO方向设置
#define SDA_IN_Duoji() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=8<<12;}
#define SDA_OUT_Duoji() {GPIOC->CRH&=0XFFFF0FFF;GPIOC->CRH|=3<<12;}
//IO操作函数
#define IIC_SCL_Duoji PCout(12) //SCL
#define IIC_SDA_Duoji PCout(11) //SDA
#define READ_SDA_Duoji PCin(11) //输入SDA
//IIC所有操作函数
void IIC_Init_Duoji(void); //初始化IIC的IO口
void IIC_Start_Duoji(void); //发送IIC开始信号
void IIC_Stop_Duoji(void); //发送IIC停止信号
void IIC_Send_Byte_Duoji(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte_Duoji(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack_Duoji(void); //IIC等待ACK信号
void IIC_Ack_Duoji(void); //IIC发送ACK信号
void IIC_NAck_Duoji(void); //IIC不发送ACK信号
/以下是测距1模块的底层驱动代码/
/以下是测距2模块的底层驱动代码/
#endif
边栏推荐
- 【HMS Core】【FAQ】【AR Engine】AR Engine常见问题合集
- 【Harmony OS】【ARK UI】Custom popup
- Storage System Architecture Evolution
- 如何剪裁svg并压缩
- ABP中的数据过滤器
- 后台登录模块以及验证码登录
- 阻塞队列实现异步消费
- 数字化时代,企业为什么需要商业智能BI
- Why do enterprises need business intelligence BI in the digital age
- Harmony OS ets ArkUI 】 【 】 development create a view and building layout
猜你喜欢

通讯录(动态版)(C语言)(VS)

软件测试的发展趋势

降压模块的使用
![could not extract ResultSet; SQL [n/a]; nested exception is org.hibernate.exception.SQLGrammarExcept](/img/00/328e4c296c00929140c9aff3bb896e.png)
could not extract ResultSet; SQL [n/a]; nested exception is org.hibernate.exception.SQLGrammarExcept

JS-DOM-全局、局部、隐式变量,数组()\函数、 prompt输入对话框、confirm(确定用户的决定-弹出对话框)

22-08-08 西安 尚医通(04)MongoDB命令、MongoTemplate、MongoRepository

【HMS core】【Ads Kit】Huawei Advertising——Overseas applications are tested in China. Official advertisements cannot be displayed

数字化时代,企业为什么需要商业智能BI

equals and ==

力扣349-两个数组的交集——HashSet
随机推荐
2022年8月深圳产品经理认证招生简章(NPDP)
【暑期每日一题】洛谷 P1048 [NOIP2005 普及组] 采药
Anonymous shared memory ashmem
快速上手Shell,看这一篇就够了
C进阶 - 程序的编译(预处理操作) + 链接
What is it like to work at Kuaishou?
力扣202-快乐数——哈希集合
A case of missing heritability
程序设计6大原则
MySQL: Implementation Principles of Submitted Read and Repeatable Read | MVCC (Multi-Version Concurrency Control) - Notes for Your Own Use
Eureka-Server------单节和集群的搭建
在快手工作是一种什么体验
Harmony OS ets ArkUI 】 【 】 development create a view and building layout
How to choose an APS system, it is necessary to clarify these seven key factors
LeetCode-636. 函数的独占时间
【HMS core】【Ads Kit】Huawei Advertising——Overseas applications are tested in China. Official advertisements cannot be displayed
基于ABP和Magicodes实现Excel导出操作
Why do enterprises need business intelligence BI in the digital age
uboot中board_init bi_arch_number在哪
不能提取结果集,SQL [n / a]; org.hibernate.exception.SQLGrammarExcept是嵌套的异常