当前位置:网站首页>Reconstruction and Synthesis of Lidar Point Clouds of Spray
Reconstruction and Synthesis of Lidar Point Clouds of Spray
2022-08-11 05:23:00 【zhSunw】
Reconstruction and Synthesis of Lidar Point Clouds of Spray
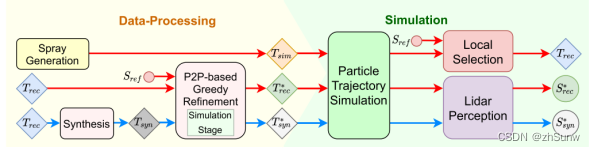
Sref真实点云,Tsim模拟的粒子集,Trec重建的粒子集,Tsyn重建的粒子集,T* 为对应粒子集的贪心策略细化结果,S* 为对应粒子集的模拟点云序列
Method
Spray Generation
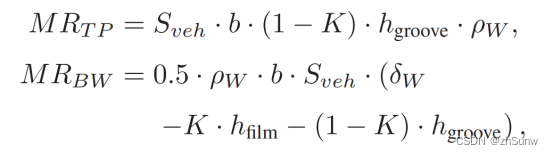
在轮胎每个网格表面设计虚拟粒子(3种)发射器,发射器根据对应粒子的初始速度及发射速率产生粒子初始状态:(主要取决于Sveh车辆速度)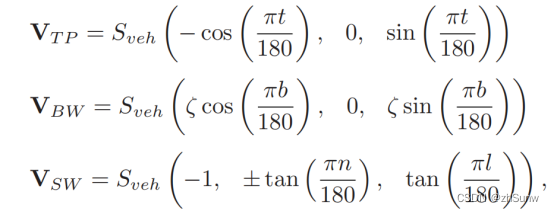
Particle Trajectory Simulation
利用CFD工具预模拟出风的阻力:
,使用Unity物理引擎进行重力、阻力以及粒子与车身之间的相互作用的模拟。
Lidar Perception
在Unity上模拟激光雷达,对粒子集采集得到点云
Local Selection
选取雷达车后(5 × 85 m2)的水花为参考点云序列,对于粒子集中的粒子当且仅当满足其到参考点云序列中任一点云中至少一个点的距离小于阈值来完成重建。
P2P-based Greedy Refinement
Local Selection考虑的是一瞬的相似性,对于一段模拟的时间,只有寿命周期内能减少Srec和Sref之间的P2P距离的粒子才保留。(通过逐帧考虑产生点与点云距离是否低于平均值贪心实现)
Synthesis
将原始初始点位置进行抖动,再根据3mm的搜索半径和0.05s时间域找到近邻点,利用这些近邻点进行插值得到新点的速度及生成时间。
Experiments
PV-RCNN模型在Waymo部分数据集上的表现:
Baseline:使用Waymo训练集上的正常数据+一个序列的喷雾(恶劣天气)数据
1 R-Seq:Baseline的数据+一个重建的序列数据(共2个喷雾数据)
5 S-Seq:Baseline的数据+五个生成的序列数据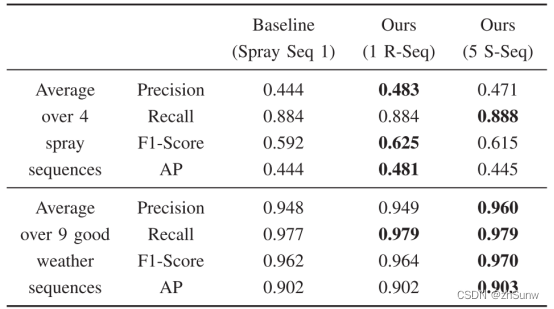
Baseline:使用Waymo训练集上的正常数据+2个序列的喷雾(恶劣天气)数据
1 R-Seq:与上个实验相同(1个真实数据+1个重建数据,共2个喷雾数据)
10 S-Seq:Baseline的数据+10个生成的序列数据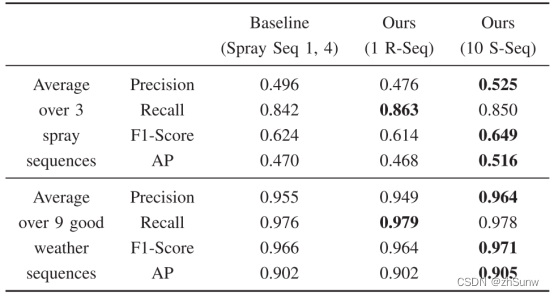
边栏推荐
猜你喜欢
![《现代密码学》学习笔记——第三章 分组密码 [三]分组密码的运行模式](/img/31/e64d08fdc9b55596f2c38914d705e6.png)
![云计算学习笔记——第三章 计算虚拟化[一]](/img/a7/48634b3466797908ed13dc847c675d.png)


随机推荐
跳转到微信小程序方法
云计算学习笔记——第五章 网络虚拟化
【OAuth2】授权机制
GBase 8a 并行技术
数组:一个存取数字的魔盒
《现代密码学》学习笔记——第三章 分组密码 [二] AES
华为手机软键盘挡住Toast
山西省公安厅交管局发布雨天安全出行提示
npm WARN config global `--global`, `--local` are deprecated. Use `--location=global` instead.
事件绑定触发
云计算学习笔记——第三章 计算虚拟化[一]
BGP联邦实验
GBase 8a MPP Cluster产品高级特性
【高德地图】易采坑合集
BoredApeYachtClub 无聊猿-NFT 源码解析第二节
NAT模式 LVS负载均衡群集部署
Redis持久化方案RDB详解
GBase 8a语法格式
快照读下mvcc实现避免幻读
GBase 8s中IO读写方法