当前位置:网站首页>7.4 introduction to robot kinematics | manipulator kinematics | two wheel differential chassis kinematics | wheel odometer
7.4 introduction to robot kinematics | manipulator kinematics | two wheel differential chassis kinematics | wheel odometer
2022-04-21 22:51:00 【Fish flavored ROS】
The author of this series of tutorials : Little fish
official account : Fish fragrance ROS
QQ Communication group :139707339
Teaching video address : Small fish B standing
Full document address : Fish fragrance ROS Official website
Copyright notice : Reprint and commercial use are prohibited unless permitted .

7.4 Introduction to robot kinematics
Robotics is a very huge subject , Anything related to robot design and application can be divided into Robotics , Mainly kinematics and dynamics 、 System structure 、 Sensing technology 、 Motion planning technology 、 Decision making technology, etc .
In order to facilitate the later robot modeling and simulation , In this section, we briefly introduce and learn the kinematics of the robot .
1. Robot kinematics
Robot kinematics studies the pose relationship of robots , It mainly includes forward kinematics and inverse kinematics .
Forward kinematics is to give the variables of each joint of the robot , Calculate the position and attitude of the end of the robot ; For example, last class we knew the relationship between robot joints and joints , Seeking joint 1 And joints 3 The relationship between
Inverse kinematics is to know the position and attitude of the end of the robot , Reverse the joint variables of the robot ; For example, when we know robot joints 1 And joints 3 The relationship between , Find the joint 1 And joints 2, The joints 2 And joints 3 The relationship between .
2. Introduction to manipulator kinematics
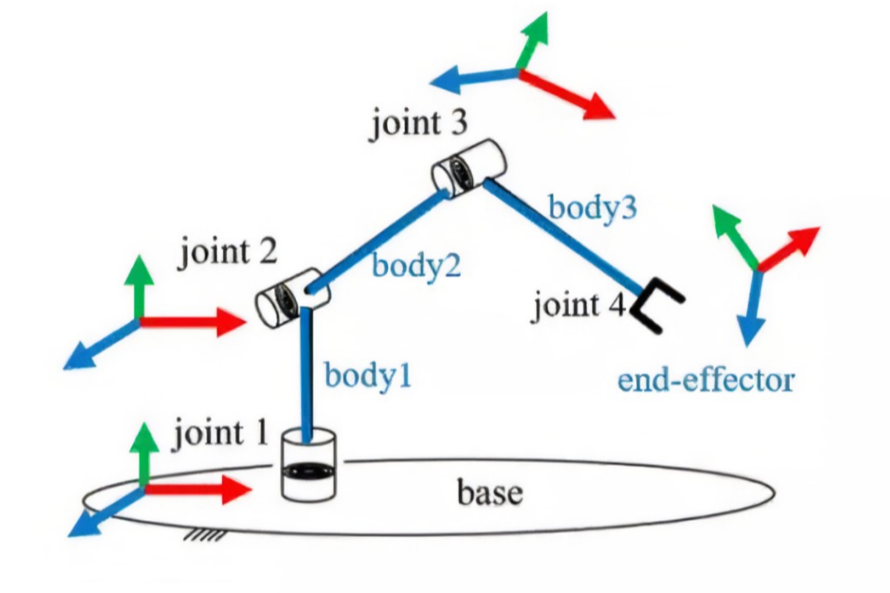
Forward kinematics : The angle of each joint is known , Find the pose of the end
Inverse kinematics : Known end attitude , Find the angle of each joint
3. Introduction to kinematics of two wheel differential chassis
The two wheel differential model refers to the chassis model of the robot chassis, which is composed of two driving wheels and several supporting wheels , image turtlebot And open source robots fishbot Both are two wheel differential models .

The two wheel differential model can pass through different speeds and steering through two driving wheels , Make the robot reach a specific angular velocity and linear velocity .

You've all seen the two wheeled balance car , You can move back and forth by relying on two wheels ( Linear velocity ), Turn left and turn right ( angular velocity ).
3.1 Positive and inverse solution
Understand the two wheel differential model , What about the forward and inverse solutions ?
Forward kinematics : Given the speed of the two wheels , Find the angular velocity of the whole vehicle ( radian / second ) And linear velocity ( rice / second )
Inverse kinematics : The angular velocity and linear velocity of the target are known , Find the speed of the two wheels
3.2 Wheel odometer
When we know the relative position between the two wheels , At the same time, we know the angular velocity and linear velocity of the robot at each moment , So how do we get the current angle and position of the robot ?
3.2.1 angle
There is only one factor that affects the current angle of the robot , It's angular velocity .
The rotation angle of the robot at a certain time = The angular velocity of the robot at this moment * This moment is long
If we determine that the angle of the robot at the initial time is 0, By accumulating the rotation angle of the robot , You can get the current angle of the robot .
In fact, the above process is to integrate the diagonal velocity to get the angle .
3.2.2 Location
Through the diagonal velocity integral , We got the angle .
The forward speed of the robot in its own direction at a certain time can be decomposed into the odometer coordinate system x Axis and y Speed in the axial direction .

As you can see from the diagram :
v y = v ∗ c o s ( θ ) v y = v ∗ s i n ( θ ) v_y = v*cos(\theta) \\ v_y = v*sin(\theta) vy=v∗cos(θ)vy=v∗sin(θ)
Got it x and y Speed in direction , Multiply by the time elapsed at a certain time corresponding to this speed , You can get this moment in x Axis and y Displacement in the direction of the axis , By accumulating the displacement, the... In the odometer can be obtained x and y.
Technical communication && Ask for help :
-
WeChat official account and exchange group : Fish fragrance ROS
-
Xiaoyu wechat :AiIotRobot
-
QQ Communication group :139707339
-
copyright protection : Joined “ Knights of rights ”(rightknights.com) Copyright protection plan of
The authors introduce :
I'm little fish , Senior players in Robotics , Now a one legged robot Algorithm Engineer in Shenzhen
Junior high school learning programming , High school began to contact robots , During the University, playing robot related competitions to achieve monthly income 2W+( The prize money for the competition )
Currently outputting Robot Learning Guide 、 Notes to the paper 、 Work experience , Welcome to pay attention to little fish , Exchange technology together , Learning robots
版权声明
本文为[Fish flavored ROS]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204212035270614.html
边栏推荐
- Tensorflow 2.8 installation
- 【中南林业科技大学】【陈】第七周创新题迷宫
- What is the core design of Dadi's performance advantage in the cache hit scenario?
- Fundamentals of Power Electronics
- Concept and working principle of image acquisition card
- L1-059 ringing stupid bell (20 minutes)
- 当贝X3色彩对比度好不好,新3.1版本色彩接近原图
- 【FPGA的基础学习-------OV7725摄像头模块】
- YARN线上动态资源调优
- 方法的重载
猜你喜欢

Fine grained emotion analysis practice
Recursive stack with the help of classical recursive tree

Opencv -- geometric transformation

Apache Flink系列-④有状态函数

TensorFlow 2.8 安装

成员变量与局部变量的对比

Pyqt5 + opencv operate local camera

Eventbridge integrated cloud service practice

君禾股份:2021年度营收增长稳健,受益产品出口业绩再创新高

当贝X3色彩对比度好不好,新3.1版本色彩接近原图
随机推荐
Sorting methods (8 kinds) detailed explanation 6 - quick sorting
Exercise questions and answers of basic theories and relevant laws and regulations in 2022 supervision engineer examination
1956 college entrance examination mathematics
One plus two earphone products: charge for 10 minutes and listen to music for 20 hours
Opencv -- histogram processing
Kubenetes (3) -- network communication (2) -- flannel and calico
Apache Flink series - ④ stateful functions
POI Point of interesting.
Software designer - Chapter 6: system security analysis and design
模块三:外包学生管理系统-架构设计文档
L1-055 who is the winner (10 points)
L1-058 6 turned over (15 points)
Outsourcing student management system detailed architecture design document
Sorting methods (8 kinds) detailed explanation 7 - counting sorting
Fine grained emotion analysis practice
【FPGA的基础学习-------OV7725摄像头模块】
【ACM】46. 全排列(1. 这里需要用到前面的元素进行排列,故不用startindex(组合、分割时才用);2. 注意处理数组中元素是否重复使用的问题(使用contains函数))
GO111MODULE=on go mod init错误(go: cannot determine module path for source directory)
APM industry awareness series - XV
YARN线上动态资源调优