当前位置:网站首页>[贴装专题] 视觉贴装平台与贴装流程介绍
[贴装专题] 视觉贴装平台与贴装流程介绍
2022-08-09 10:00:00 【丶布布】
- 博客主页:https://blog.csdn.net/weixin_43197380
- 欢迎点赞 收藏 留言 如有错误敬请指正!
- 本文由 Loewen丶原创,首发于 CSDN
- 现在的付出,都会是一种沉淀,只为让你成为更好的人
视觉贴装平台介绍
平台的贴装流程:
- 将下视相机(DownLook)移至补强片贴装位置;
目的:通过下视相机拍照,=补强片贴装位置中心的实际物理坐标; - 再将下视相机(DownLook)移至左侧补强片进料位置,拍照补强片;
目的:通过下视相机拍照,计算左侧进料处的补强片的实际中心坐标,便于吸嘴吸取; - 根据步骤2计算到的补强片位置,移动下视相机(DownLook)旁的吸嘴至补强片中心位置;
- 吸取;
- 移动吸嘴至上视相机(UpLook),固定相机拍照;
目的:计算出补强片中心与吸嘴中心的偏差以及补强片角度与补强片贴装位置的角度偏差; - 移动吸嘴,进行贴装;
贴装系统示意图如下:
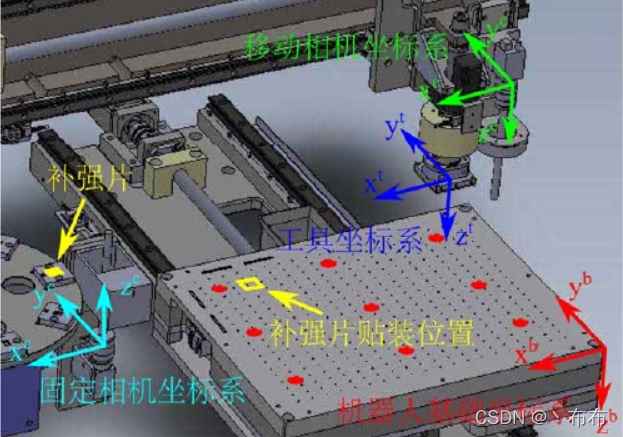
- 补强片贴装位置在下视相机(DownLook)坐标系中的中心坐标Amcam;
- 被吸取的补强片在上视相机(UpLook)坐标系中的中心坐标Bscam;
- 将相机获取的两个特征点位置Amcam与Bscam转换到基础坐标系中,可以得到两个特征点在基础坐标系中的实际物理坐标,又已知吸嘴中心的在基础坐标系中的实际物理坐标(控制器读取),可以计算出吸嘴吸取补强片贴合至补强片贴装位置的实际物理距离。
所以我们需要对系统的Eye-in-hand与Eye-to-hand视觉部分进行手眼标定 ,得到移动定位相机(DownLook)坐标系、固定相机(UpLook)坐标系与基础坐标系之间的转换关系。
注:手眼标定可参考我的博文:基于多目视觉的手眼标定
| 戳戳小手帮忙点个免费的赞吧,嘿嘿。 |
边栏推荐
- MySQL关于表的知识点,进来学习!
- Source GBase database, oracle quote "ORA - 01000: beyond the shop open the cursor"
- 【八大排序①】插入排序(直接插入排序、希尔排序)
- 3D printed this DuPont cable management artifact, and the desktop is no longer messy
- function two
- 多线程(基础)
- Super detailed MySQL basic operations
- 1. Introduction to threads
- 程序环境和预处理
- EndNote使用指南
猜你喜欢

ArrayList和LinkedList
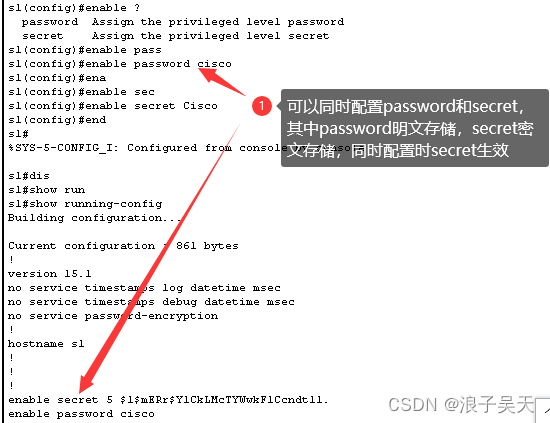
Cisco common basic configuration of common commands
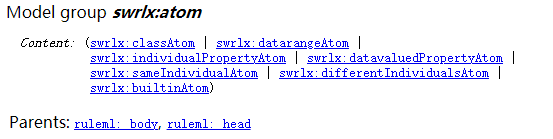
Ontology Development Diary 05-Strive to Understand SWRL (Part 2)
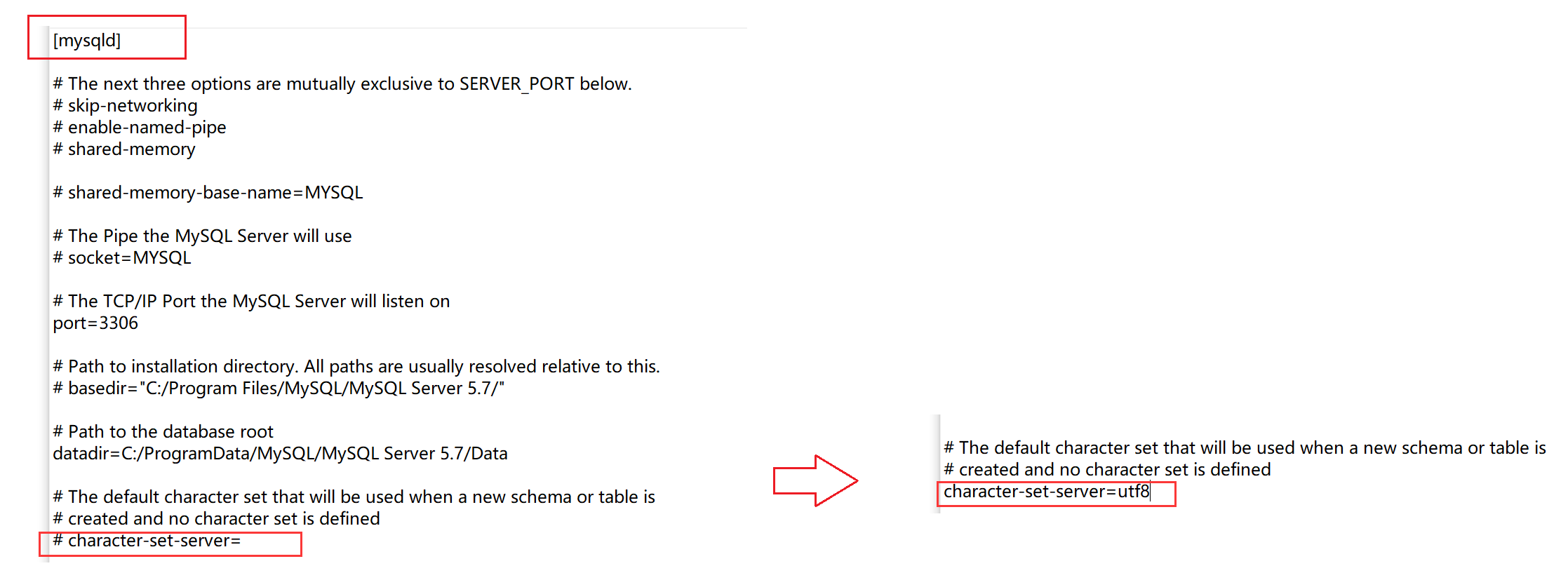
快速解决MySQL插入中文数据时报错或乱码问题
多线程案例——阻塞式队列
![[Machine Learning] Basics of Data Science - Basic Practice of Machine Learning (2)](/img/9f/5afabec1b9ab1871130c8bf1bae472.png)
[Machine Learning] Basics of Data Science - Basic Practice of Machine Learning (2)
文件操作
Demand side power load forecasting (Matlab code implementation)

搭建Tigase进行二次开发

安装torch_sparse失败解决方法
随机推荐
Redis 回击 Dragonfly:13 年后,Redis 的架构依然是同类最佳
Go-指针的那些事
Dream Notes 0809
需求侧电力负荷预测(Matlab代码实现)
3D printed this DuPont cable management artifact, and the desktop is no longer messy
mac 上安装Redis和配置
写一个通讯录小程序
收到人生第一笔五位数工资
基于信号量与环形队列实现读写异步缓存队列
EndNote User Guide
在anaconda环境中配置cuda和cudnn
3. Coding method
蓄电池建模、分析与优化(Matlab代码实现)
LeetCode75:颜色分类-C语言一次遍历求解
3.List interface and implementation class
MySQL约束关系,你必须要知道的知识点!
[Machine Learning] Detailed explanation of web crawler combat
Thread,Runnable,ExecutorService线程池控制下线程量
Tigase插件编写——注册用户批量查询
Attentional Feature Fusion