当前位置:网站首页>【点云系列】Neural Opacity Point Cloud(NOPC)
【点云系列】Neural Opacity Point Cloud(NOPC)
2022-04-23 06:11:00 【^_^ 晅菲】
1. 概要
2020 PAMI期刊内容
项目地址:https://wuminye.github.io/NOPC/
涉及相关内容:基于图像的渲染(IBR)、神经渲染、抠图
特点:结合了点云来增强渲染效果
虞晶怡团队作品
2. 动机
传统的基于图像的不透明外壳(Image-Based Opacity Hull, IBOH)技术会因采样不足而导致伪影和叠影。通过使用高质量的几何可以缓解该问题,但是对于毛绒物体来说,获取真实准确的几何外观仍是一项巨大挑战。这类物体包含成千上万根毛发纤维,由于纤维极细且无规律地相互遮挡,它们表现出很强的与视角相关的不透明度,这种不透明度信息很难在几何形状和外观上进行建模,哪怕使用最新的3D扫描仪,而无法完全获得。
研究人员提出的渲染方法能够将基于图像的渲染(IBR)与神经网络渲染(Neural Rendering)结合,以渲染对象的粗糙点云作为输入,使用相对稀疏视点下拍摄的图像数据,渲染出毛绒物体在自由视角下逼真的外观和准确的不透明度。该研究同时提出了一种用于拍摄采集真实毛绒物体数据的拍摄系统。 实现了自由视角下毛绒物体的高质量渲染。即使使用低质量不完整的三维点云,也可以生成逼真的渲染。
3. 方法
算法流程示意图:
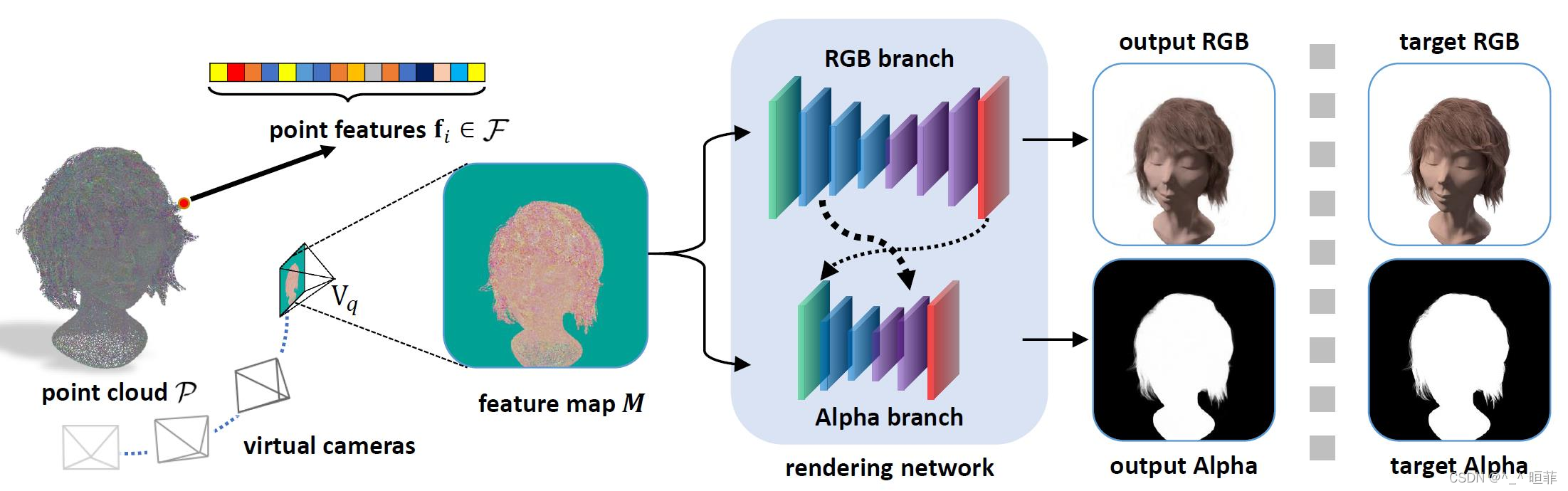
如下图。从点云 P P P当中,学习到其对应的特征 F F F。为了适配到新的视角 V V V,我们将 P P P和 F F F投射到 V V V上来构建视角独立的特征图 M M M。所提出的多分支框架将 M M M映射到 V V V的RGB图像和一个alpha通道上。网络可以通过使用GT RGB图和alpha通道来实现端到端的训练。
公式描述如下:

点云表示: P = { p i ∈ R 3 } i = 1 n p P=\{\mathbf{p}_i \in \mathbb{R}^3\}^{np}_{i=1} P={
pi∈R3}i=1np
特征表示: F = { f ∈ R m } i = 1 n p F =\{\mathbf{f}\in \mathbb{R}^m\}^{np}_{i=1} F={
f∈Rm}i=1np, 这里的 n p np np均指代点数, n n n张图
I q ^ \hat{\mathbf{I}_q} Iq^: 第 q q q个视角的RGB 图
A q ^ \hat{\mathbf{A}_q} Aq^: 第 q q q个视角的alpha通道
相机参数:视角 V q V_q Vq, K q \mathbf{K}_q Kq, E q \mathbf{E}_q Eq
Ψ \varPsi Ψ: 点投射
R θ R_{\theta} Rθ:神经渲染,用来生成在视角 V q V_q Vq的RGB图和alpha通道图。
整体网络框架:
具体来说,NOPC由两个模块组成,如图5:
- 第一个模块旨在学习每个三维点的特征,该特征编码了三维点周围的局部几何和外观信息。通过将所有三维点及其对应的特征投影到虚拟视角,就可以获得该视角下的特征图;
- 第二个模块使用卷积神经网络从特征图中解码出该视角下的RGB图像和不透明蒙版。该卷积神经网络基于U-net网络结构,用门控卷积(gated convolution)代替了常规的卷积,以便鲁棒地处理粗糙或破洞的三维几何。同时在U-net 原有的层级结构的基础上,从预测RGB 图像的分支中扩展出新的alpha预测分支,该分支有效地增强了整个网络模型的性能。

RGB的编码器和解码器:
U-Net架构+gated 卷积(替代普通卷积):可以增强去噪和补全的能力
编码器:1个卷积块+4个下采样块(尺寸减半通道双倍)
解码器:4个上采样块(与 M q \mathbf{M}_q Mq大小一致) + 1个卷积块(输出至3通道)
Alpha通道的编码器和解码器:
Alpha通道对于低层特征非常的敏感,例如图像梯度和边缘等。
编码器: 1个卷积块+2个下采样块(仅为RGB编码器通道的2/3)
解码器:alpha编码器+2上采样模块+1个卷积块
数据预处理:
校准:在第 f f f个图像上计算第 i i i个相机的外参,在每个相机对应的帧,也即一个视角 V q V_q Vq.

抠图:为了去除背景

参数说明:
ε \varepsilon ε:0.2
j j j:像素的位置
视角独立的特征图:
给定点云 P P P与其特征 F F F, 视角 V q V_q Vq,中心投影 c q \mathbf{c}_q cq,已知的相机参数 K q \mathbf{K}_q Kq和 E q \mathbf{E}_q Eq, 则每个点 p i \mathbf{p}_i pi将投影到:
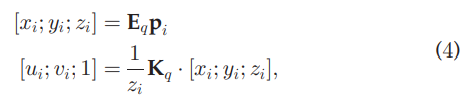
这里 [x,y,z]为正常三维坐标; [u, v]是 p i \mathbf{p}_i pi投影后的坐标。
然后根据公式(4)来计算视角独立的特征图 M q \mathbf{M}_q Mq,如公式(5),其有 m + 3 m+3 m+3个通道。
其中, d i ⃗ = p i − c q ∣ ∣ p i − c q ∣ ∣ 2 \vec{d_i}=\frac{\mathbf{p}_i-\mathbf{c}_q}{||\mathbf{p}_i-\mathbf{c}_q||_2} di=∣∣pi−cq∣∣2pi−cq, S i = { ( u , v ) ∣ p i 是 在 ( u , v ) 上 可 视 化 的 点 } S_i = \{ (u,v)| \mathbf{p}_i 是在(u,v)上可视化的点\} Si={
(u,v)∣pi是在(u,v)上可视化的点}

梯度损失: = fi + f0的梯度

这里的 ρ ( . ) \rho(.) ρ(.)表示仅保留向量前 m m m维。

神经不透明渲染
损失函数:

Ω ( A q , G ) \Omega{(\mathbf{A}_q, \mathbf{G})} Ω(Aq,G): 图像I与 G的mask,其中G 是alpha通道A和点云深度图的交集。

4. 实验
NOPC有很广泛的应用场景。它能够用于虚拟现实(VR)和增强现实(AR)内容的采集渲染流程,将带有透明度但不易建模的物体(例如人物头发、毛绒玩具等)在任意虚拟三维场景中逼真地展示。还可以与偶像AR实时合影,偶像的比例大小与位置可以按需求调整,保证了在任意背景下呈现的真实感。

数据采集及处理:
具体数据集请看项目首页的描述
主要数据集:头发、和 皮毛。


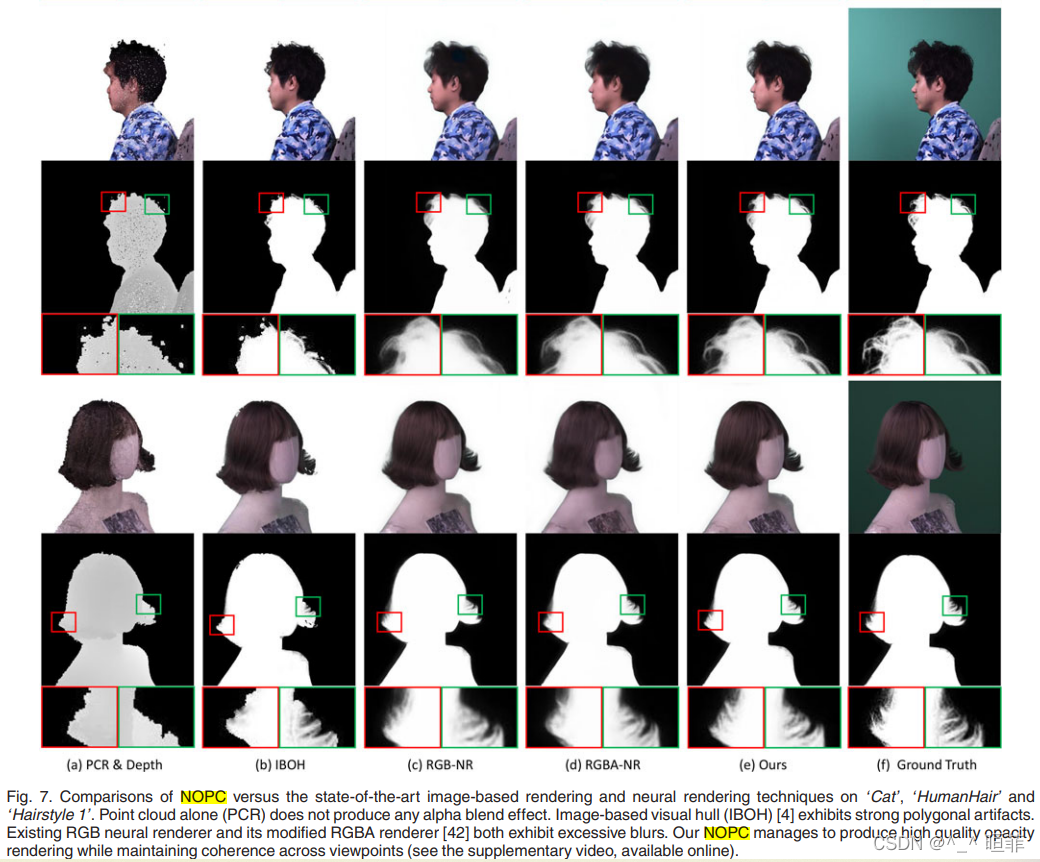
实验效果:


5. 总结
Rendering渲染: Good Image + Poor Geometry
Reconstruction重建: Learning based feature,matching,proxy estimation,Optimization
Neural Representation = Neural Modeling + Rendering
那么这篇其实也在告诉我们,差一些的点云+ 好的图片= 就能得到超级多的好图片
版权声明
本文为[^_^ 晅菲]所创,转载请带上原文链接,感谢
https://blog.csdn.net/weixin_43882112/article/details/122046336
边栏推荐
- Migrating your native/mobile application to Unified Plan/WebRTC 1.0 API
- PyMySQL连接数据库
- 机器学习笔记 一:学习思路
- 第2章 Pytorch基础2
- 【动态规划】杨辉三角
- torch. mm() torch. sparse. mm() torch. bmm() torch. Mul () torch The difference between matmul()
- 1.1 PyTorch和神经网络
- ThreadLocal,看我就够了!
- BottomSheetDialogFragment 与 ListView RecyclerView ScrollView 滑动冲突问题
- face_recognition人脸检测
猜你喜欢

【点云系列】点云隐式表达相关论文概要

Easyui combobox 判断输入项是否存在于下拉列表中
![[2021 book recommendation] effortless app development with Oracle visual builder](/img/db/d8802b42d5374e4117db638a0b82b0.png)
[2021 book recommendation] effortless app development with Oracle visual builder
![[2021 book recommendation] practical node red programming](/img/f4/e397c01f1551cd6c59ea4f54c197e6.png)
[2021 book recommendation] practical node red programming
![[recommendation of new books in 2021] enterprise application development with C 9 and NET 5](/img/1d/cc673ca857fff3c5c48a51883d96c4.png)
[recommendation of new books in 2021] enterprise application development with C 9 and NET 5

第8章 生成式深度学习

./gradlew: Permission denied

免费使用OriginPro学习版
![[2021 book recommendation] Red Hat Certified Engineer (RHCE) Study Guide](/img/36/1c484aec5efbac8ae49851844b7946.png)
[2021 book recommendation] Red Hat Certified Engineer (RHCE) Study Guide

ThreadLocal,看我就够了!
随机推荐
xcode 编译速度慢的解决办法
Android暴露组件——被忽略的组件安全
[recommendation for new books in 2021] professional azure SQL managed database administration
【 planification dynamique】 différentes voies 2
Project, how to package
PyMySQL连接数据库
【点云系列】Learning Representations and Generative Models for 3D pointclouds
Five methods are used to obtain the parameters and calculation of torch network model
三子棋小游戏
Component learning (2) arouter principle learning
MySQL5. 7 insert Chinese data and report an error: ` incorrect string value: '\ xb8 \ XDF \ AE \ xf9 \ X80 at row 1`
【2021年新书推荐】Practical IoT Hacking
第5 章 机器学习基础
Some common data type conversion methods in pytorch are similar to list and NP Conversion method of ndarray
树莓派:双色LED灯实验
【3D形状重建系列】Implicit Functions in Feature Space for 3D Shape Reconstruction and Completion
MySQL notes 4_ Primary key auto_increment
adb shell 常用命令
Personal blog website construction
微信小程序 使用wxml2canvas插件生成图片部分问题记录