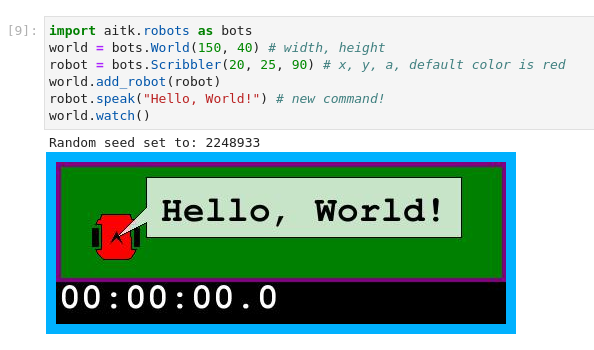
aitk.robots

A lightweight Python robot simulator for JupyterLab, Notebooks, and other Python environments.
Goals
- A lightweight mobile robotics simulator
- Usable in the classroom, research, or exploration
- Explore wheeled robots with range, cameras, smell, and light sensors
- Operate quickly without a huge amount of resources
- Create reproducible experiments
- Designed for exposition, experimentation, and analysis
- Sensors designed for somewhat realistic problems (such as image recognition)
- Especially designed to work easily with Machine Learning and Artificial Intelligence systems
Installation
For the core operations, you will need to install just aitk.robots:
pip install aitk.robots
To use the Jupyter enhancements, you'll also need the browser-based extensions. You can install those with:
jupyter labextension install @jupyter-widgets/jupyterlab-manager
If not in a conda environment, then you will also need to:
jupyter nbextension enable --py widgetsnbextension
For additional information, please see:



 2 Nov 11, 2022
2 Nov 11, 2022
 1 Nov 20, 2021
1 Nov 20, 2021
 1 Jun 30, 2021
1 Jun 30, 2021
 5 Jan 27, 2022
5 Jan 27, 2022
 1 Oct 26, 2021
1 Oct 26, 2021
 199 Dec 06, 2022
199 Dec 06, 2022
 42 Sep 21, 2022
42 Sep 21, 2022
 82 Jan 07, 2023
82 Jan 07, 2023
 19 Dec 15, 2022
19 Dec 15, 2022
 36 Nov 11, 2022
36 Nov 11, 2022
 1 Jan 15, 2022
1 Jan 15, 2022
 8 Feb 22, 2022
8 Feb 22, 2022
 613 Jan 08, 2023
613 Jan 08, 2023
 589 Dec 29, 2022
589 Dec 29, 2022
 5 Aug 04, 2022
5 Aug 04, 2022
 0 Jul 25, 2022
0 Jul 25, 2022
 5 Feb 24, 2022
5 Feb 24, 2022
 172 Dec 21, 2022
172 Dec 21, 2022
 1 Jan 18, 2022
1 Jan 18, 2022
 12 Aug 18, 2022
12 Aug 18, 2022