
D-NeRF: Neural Radiance Fields for Dynamic Scenes
[Project] [Paper]
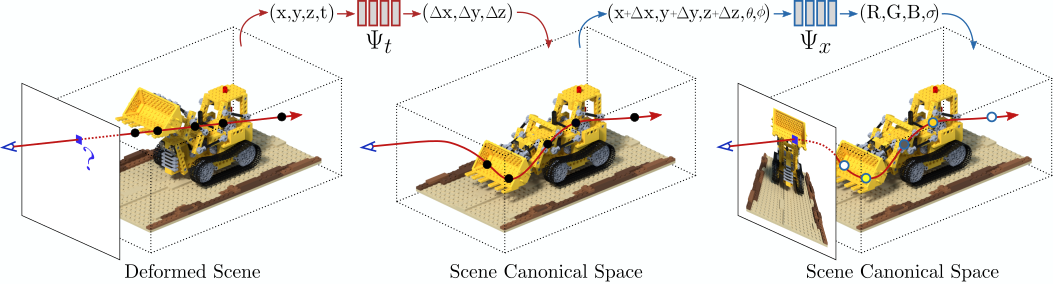
D-NeRF is a method for synthesizing novel views, at an arbitrary point in time, of dynamic scenes with complex non-rigid geometries. We optimize an underlying deformable volumetric function from a sparse set of input monocular views without the need of ground-truth geometry nor multi-view images.
This project is an extension of NeRF enabling it to model dynmaic scenes. The code heavily relays on NeRF-pytorch.
Installation
git clone https://github.com/albertpumarola/D-NeRF.git
cd D-NeRF
conda create -n dnerf python=3.6
conda activate dnerf
pip install -r requirements.txt
cd torchsearchsorted
pip install .
cd ..
Download Pre-trained Weights
You can download the pre-trained models from drive or dropbox. Unzip the downloaded data to the project root dir in order to test it later. See the following directory structure for an example:
├── logs
│ ├── mutant
│ ├── standup
│ ├── ...
Download Dataset
You can download the datasets from drive or dropbox. Unzip the downloaded data to the project root dir in order to train. See the following directory structure for an example:
├── data
│ ├── mutant
│ ├── standup
│ ├── ...
Demo
We provide simple jupyter notebooks to explore the model. To use them first download the pre-trained weights and dataset.
| Description | Jupyter Notebook |
|---|---|
| Synthesize novel views at an arbitrary point in time. | render.ipynb |
| Reconstruct mesh at an arbitrary point in time. | reconstruct.ipynb |
| Quantitatively evaluate trained model. | metrics.ipynb |
Test
First download pre-trained weights and dataset. Then,
python run_dnerf.py --config configs/mutant.txt --render_only --render_test
This command will run the mutant experiment. When finished, results are saved to ./logs/mutant/renderonly_test_799999 To quantitatively evaluate model run metrics.ipynb notebook
Train
First download the dataset. Then,
conda activate dnerf
export PYTHONPATH='path/to/D-NeRF'
export CUDA_VISIBLE_DEVICES=0
python run_dnerf.py --config configs/mutant.txt
Citation
If you use this code or ideas from the paper for your research, please cite our paper:
@article{pumarola2020d,
title={D-NeRF: Neural Radiance Fields for Dynamic Scenes},
author={Pumarola, Albert and Corona, Enric and Pons-Moll, Gerard and Moreno-Noguer, Francesc},
journal={arXiv preprint arXiv:2011.13961},
year={2020}
}

 5.1k Jan 08, 2023
5.1k Jan 08, 2023
 31 Nov 19, 2022
31 Nov 19, 2022
 68 Jan 04, 2023
68 Jan 04, 2023
 3 Sep 30, 2021
3 Sep 30, 2021
 11 Nov 19, 2022
11 Nov 19, 2022
 320 Jan 08, 2023
320 Jan 08, 2023
 6 Oct 09, 2022
6 Oct 09, 2022
 16 Aug 30, 2022
16 Aug 30, 2022
 410 Jan 03, 2023
410 Jan 03, 2023
 1 Jan 11, 2022
1 Jan 11, 2022
 401 Jan 02, 2023
401 Jan 02, 2023
 529 Dec 30, 2022
529 Dec 30, 2022
 29 Aug 30, 2022
29 Aug 30, 2022
 5 Dec 05, 2022
5 Dec 05, 2022
 34 Jul 22, 2022
34 Jul 22, 2022
 130 Jan 06, 2023
130 Jan 06, 2023
 4.3k Jan 08, 2023
4.3k Jan 08, 2023
 3 Jul 06, 2022
3 Jul 06, 2022
 143 Jan 05, 2023
143 Jan 05, 2023