Unsupervised State Representation Learning in Atari
Ankesh Anand*, Evan Racah*, Sherjil Ozair*, Yoshua Bengio, Marc-Alexandre Côté, R Devon Hjelm
This repo provides code for the benchmark and techniques introduced in the paper Unsupervised State Representation Learning in Atari
-
📦 Install -- Install relevant dependencies and the project -
🔧 Usage -- Learn how to use AtariARI and train representations with Spatio-Temporal DeepInfomax (ST-DIM) -
🕹️ RAM Annotations -- Mapping of RAM indexes to semantic state variables -
📜 Poster -- Summary of the paper in a poster format -
🎞️ Slides -- Slides describing the paper
Install
AtariARI Wrapper
You can do a minimal install to get just the AtariARI (Atari Annotated RAM Interface) wrapper by doing:
pip install 'gym[atari]'
pip install git+git://github.com/mila-iqia/atari-representation-learning.git
This just requires gym[atari] and it gives you the ability to play around with the AtariARI wrapper. If you want to use the code for training representation learning methods and probing them, you will need a full installation:
Full installation (AtariARI Wrapper + Training & Probing Code)
# PyTorch and scikit learn
conda install pytorch torchvision -c pytorch
conda install scikit-learn
# Baselines for Atari preprocessing
# Tensorflow is a dependency, but you don't need to install the GPU version
conda install tensorflow
pip install git+git://github.com/openai/baselines
# pytorch-a2c-ppo-acktr for RL utils
pip install git+git://github.com/ankeshanand/pytorch-a2c-ppo-acktr-gail
# Clone and install our package
pip install -r requirements.txt
pip install git+git://github.com/mila-iqia/atari-representation-learning.git
Usage
Atari Annotated RAM Interface (AtariARI):
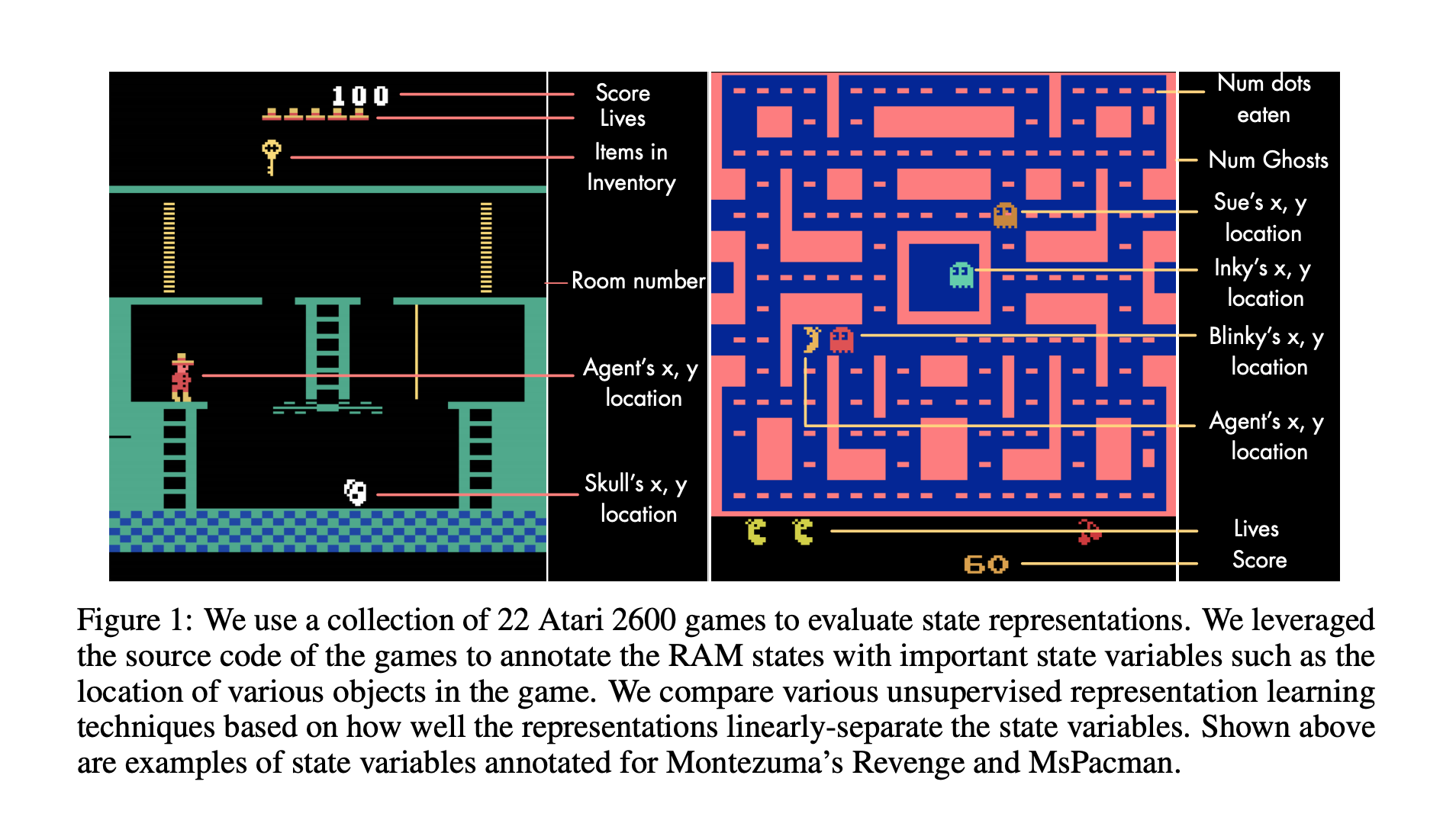
AtariARI exposes the ground truth labels for different state variables for each observation. We have made AtariARI available as a Gym wrapper, to use it simply wrap an Atari gym env with AtariARIWrapper.
import gym
from atariari.benchmark.wrapper import AtariARIWrapper
env = AtariARIWrapper(gym.make('MsPacmanNoFrameskip-v4'))
obs = env.reset()
obs, reward, done, info = env.step(1)
Now, info is a dictionary of the form:
{'ale.lives': 3,
'labels': {'enemy_sue_x': 88,
'enemy_inky_x': 88,
'enemy_pinky_x': 88,
'enemy_blinky_x': 88,
'enemy_sue_y': 80,
'enemy_inky_y': 80,
'enemy_pinky_y': 80,
'enemy_blinky_y': 50,
'player_x': 88,
'player_y': 98,
'fruit_x': 0,
'fruit_y': 0,
'ghosts_count': 3,
'player_direction': 3,
'dots_eaten_count': 0,
'player_score': 0,
'num_lives': 2}}
Note: In our experiments, we use additional preprocessing for Atari environments mainly following Minh et. al, 2014. See atariari/benchmark/envs.py for more info!
If you want the raw RAM annotations (which parts of ram correspond to each state variable), check out atariari/benchmark/ram_annotations.py
Probing
We provide an interface for the included probing tasks.
First, get episodes for train, val and, test:
from atariari.benchmark.episodes import get_episodes
tr_episodes, val_episodes,\
tr_labels, val_labels,\
test_episodes, test_labels = get_episodes(env_name="PitfallNoFrameskip-v4",
steps=50000,
collect_mode="random_agent")
Then probe them using ProbeTrainer and your encoder (my_encoder):
from atariari.benchmark.probe import ProbeTrainer
probe_trainer = ProbeTrainer(my_encoder, representation_len=my_encoder.feature_size)
probe_trainer.train(tr_episodes, val_episodes,
tr_labels, val_labels,)
final_accuracies, final_f1_scores = probe_trainer.test(test_episodes, test_labels)
To see how we use ProbeTrainer, check out scripts/run_probe.py
Here is an example of my_encoder:
# get your encoder
import torch.nn as nn
import torch
class MyEncoder(nn.Module):
def __init__(self, input_channels, feature_size):
super().__init__()
self.feature_size = feature_size
self.input_channels = input_channels
self.final_conv_size = 64 * 9 * 6
self.cnn = nn.Sequential(
nn.Conv2d(input_channels, 32, 8, stride=4),
nn.ReLU(),
nn.Conv2d(32, 64, 4, stride=2),
nn.ReLU(),
nn.Conv2d(64, 128, 4, stride=2),
nn.ReLU(),
nn.Conv2d(128, 64, 3, stride=1),
nn.ReLU()
)
self.fc = nn.Linear(self.final_conv_size, self.feature_size)
def forward(self, inputs):
x = self.cnn(inputs)
x = x.view(x.size(0), -1)
return self.fc(x)
my_encoder = MyEncoder(input_channels=1,feature_size=256)
# load in weights
my_encoder.load_state_dict(torch.load(open("path/to/my/weights.pt", "rb")))
Spatio-Temporal DeepInfoMax:
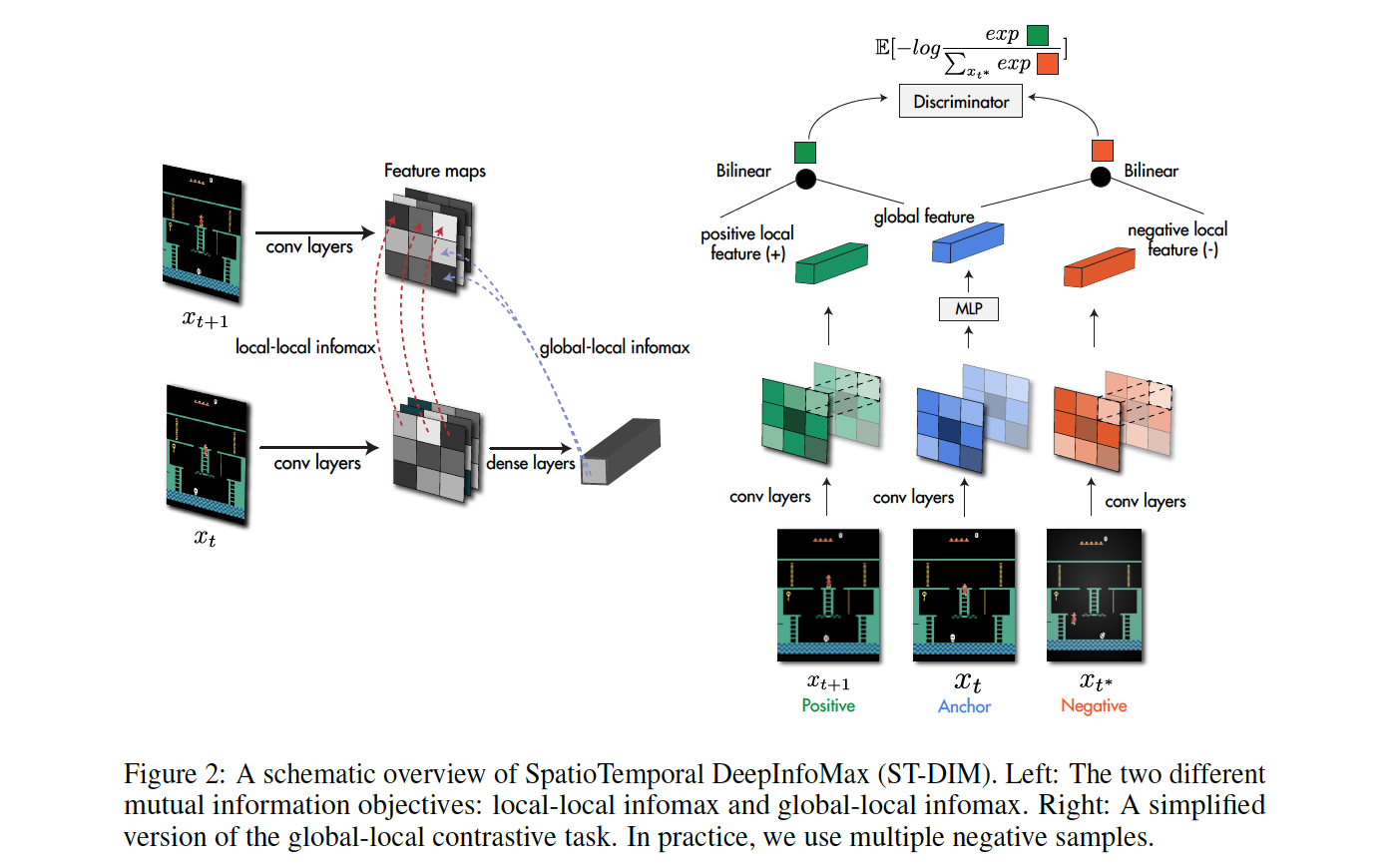
src/ contains implementations of several representation learning methods, along with ST-DIM. Here's a sample usage:
python -m scripts.run_probe --method infonce-stdim --env-name {env_name}
where env_name is of the form {game}NoFrameskip-v4, such as PongNoFrameskip-v4
Citation
@article{anand2019unsupervised,
title={Unsupervised State Representation Learning in Atari},
author={Anand, Ankesh and Racah, Evan and Ozair, Sherjil and Bengio, Yoshua and C{\^o}t{\'e}, Marc-Alexandre and Hjelm, R Devon},
journal={arXiv preprint arXiv:1906.08226},
year={2019}
}

 144 Jan 08, 2023
144 Jan 08, 2023
 60 Dec 05, 2022
60 Dec 05, 2022
 288 Oct 28, 2022
288 Oct 28, 2022
 1 Nov 03, 2022
1 Nov 03, 2022
 9 Oct 18, 2022
9 Oct 18, 2022
 5 Mar 30, 2022
5 Mar 30, 2022
 6 Dec 21, 2022
6 Dec 21, 2022
 1.1k Dec 30, 2022
1.1k Dec 30, 2022
 14 Dec 17, 2022
14 Dec 17, 2022
 0 Jun 02, 2022
0 Jun 02, 2022
 2.2k Dec 31, 2022
2.2k Dec 31, 2022
 25 May 20, 2022
25 May 20, 2022
 39 Dec 08, 2022
39 Dec 08, 2022
 8 Mar 31, 2022
8 Mar 31, 2022
 76 Jan 03, 2023
76 Jan 03, 2023
 56 Nov 15, 2022
56 Nov 15, 2022
 9 Jun 01, 2022
9 Jun 01, 2022
 32 Nov 22, 2022
32 Nov 22, 2022
 4 Sep 05, 2022
4 Sep 05, 2022
 434 Dec 30, 2022
434 Dec 30, 2022