LaneDetectionAndLaneKeeping
This project is part of my bachelor's thesis. The goal is to get a gopigo car to detect lanes provided by the raspberry pi camera v2. Return an information about the direction of the lane and keep the lane with a p-controller. Additionally, I implemented an obstacle detection with a haar cascade for cars.
Pipeline

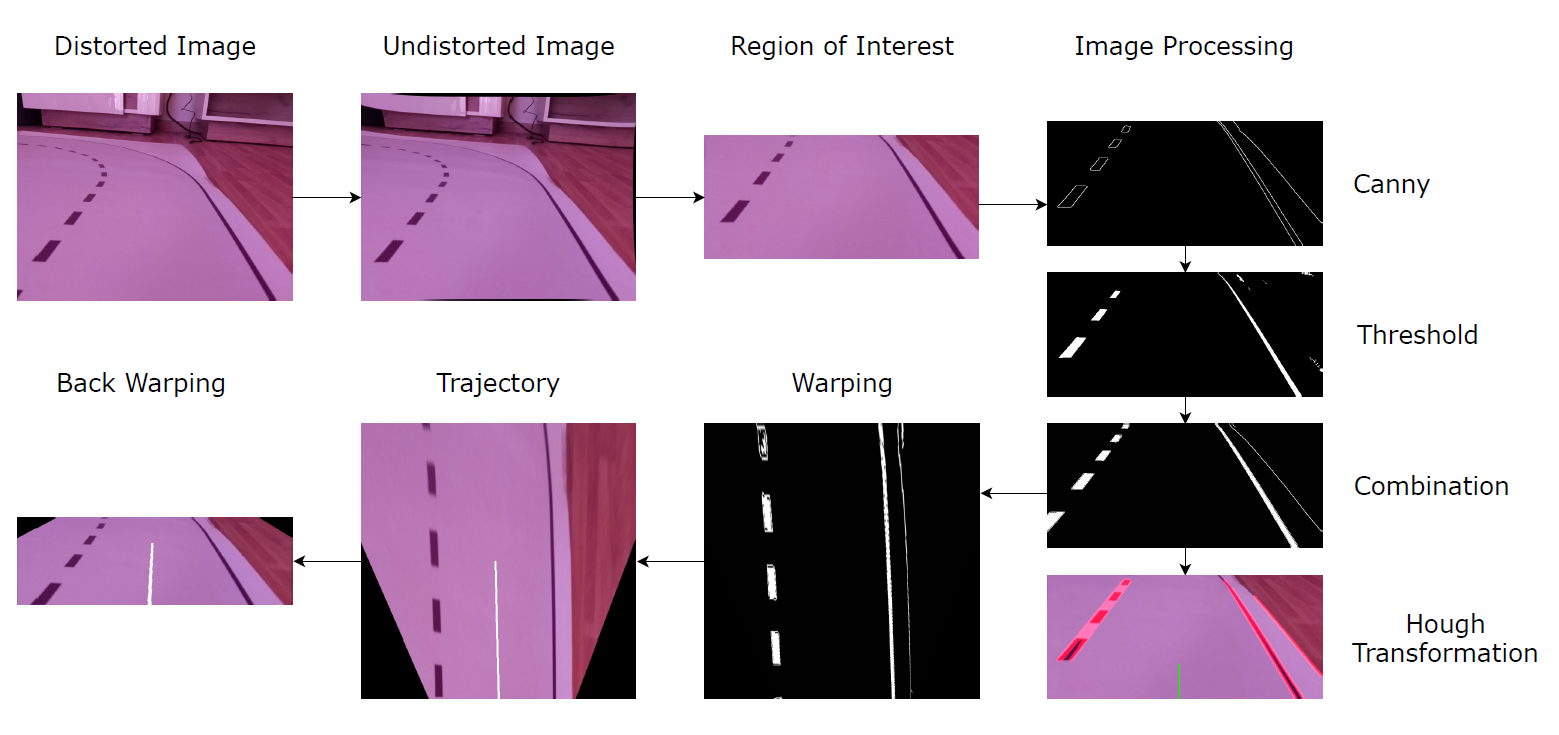
The workthrough of the lane detection and lane keeping is the following:
- A possibly distorted input image is provided by the raspberry pi camera. With the file camcalib.py the input image is getting undistorted.



- After that the region of intested is being set. A lot of different lane detection projects use a trapezoid for the ROI, but this wasn't possible for this project since in turns the inner lane disappears and I need a the information that I get. ROI also helps with the computing power needed -> smaller images, faster computation

- The image process contains of canny edge detection and a threshold image. The combination of both is the combo_image and is used to warp the image. To visualize the lanes a hough transformation is used (right image)

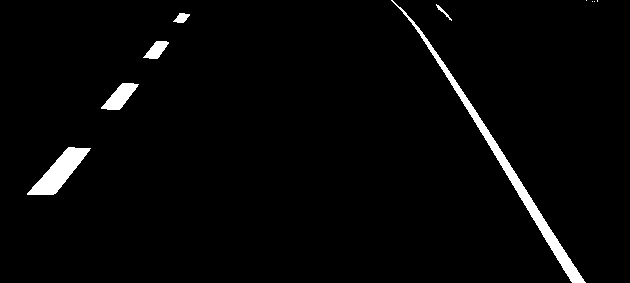


- The warping of the image into a birdeye-view provids an optimal image perspective to extract the lane information especially in curved lanes.

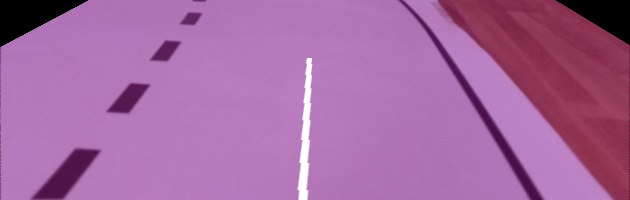
- To calculate the aimed trajectory the birdeye-image is being halfed. This halfed image is being scanned for the lanes. As a return a few middlepoints are generated and averaged. The trajectory is drawn into the birdeye-image from the middle of vehicle (bottom of the image) to the half of the image. As a x-value the averaged middlepoints is used. After that I rewarped the image to display the image in normal perspective as well!

-
The detect_lanes_img function returnes the direction of the trajectory and the center of the car for a variance analysis.
-
The last part is the implementation of a p-controller that is correcting the error between the trajectory and the middle of the car
The workthrough of the obstacle detection is the following:
- First you need a haar cascade for cars -> cars.xml
- After that take a reference image of an obstacle you want to detect
- Meassure the distance to the object and the width of the object and correct the variables KNOWN_DISTANCE and KNOWN_WIDTH
- Adjust the wanted distance before stopping
- After that drive onto the object and hope that all goes to play and nothing get's smashed :)



 914 Dec 21, 2022
914 Dec 21, 2022
 438 Dec 22, 2022
438 Dec 22, 2022
 10 Apr 06, 2022
10 Apr 06, 2022
 66 Nov 16, 2022
66 Nov 16, 2022
 28 Oct 10, 2022
28 Oct 10, 2022
 5 Dec 10, 2022
5 Dec 10, 2022
 107 Dec 26, 2022
107 Dec 26, 2022
 29 Nov 25, 2022
29 Nov 25, 2022
 73 Nov 06, 2022
73 Nov 06, 2022
 65 Sep 12, 2022
65 Sep 12, 2022
 24 Nov 30, 2022
24 Nov 30, 2022
 10 Nov 10, 2022
10 Nov 10, 2022
 116 Dec 26, 2022
116 Dec 26, 2022
 6.7k Dec 28, 2022
6.7k Dec 28, 2022
 8 Nov 02, 2022
8 Nov 02, 2022
 248 Jan 02, 2023
248 Jan 02, 2023
 6 Mar 10, 2022
6 Mar 10, 2022
 14 Oct 18, 2022
14 Oct 18, 2022
 1 Dec 02, 2021
1 Dec 02, 2021
 74 Jan 07, 2023
74 Jan 07, 2023