当前位置:网站首页>Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight
2022-04-23 07:52:00 【Apple Laboratory of Central South University】
author : 19 the lz
date :2021-11-3
The paper :《Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight》
problem :
Under the condition of limited time and airborne computing resources , The existing work can not guarantee the generation of safe and feasible dynamic trajectory with high success rate .
contribution :
(1) A set dynamics path search algorithm is proposed 、b A robust and efficient method integrating spline optimization and time adjustment .
(2) A new method based on b Optimization formula of spline convex hull characteristics .
(3) A method based on derivative control points and non-uniform control points is adopted b Adjustment method of spline time allocation .
One 、 background :
Two 、 Related work :
Hard constraint method
The global optimality is guaranteed by convex form . However , Ignoring the distance from obstacles in free space , This often causes the trajectory to approach obstacles . Besides , Dynamic constraints are conservative , Make the track speed insufficient , Fly fast .
Soft constraint
Methods using gradient information to push the trajectory away from obstacles , But there is a local minimum problem , There is no strong guarantee of feasibility and success rate . Our optimization method also uses gradient information to improve the security of trajectory . However , It is different from the previous methods of calculating expensive integration along the trajectory line , be based on b Convex hull properties of splines , Make the formula simpler . It greatly improves the computational efficiency and convergence speed .
3、 ... and 、 Research process and results :
Front end trajectory generation
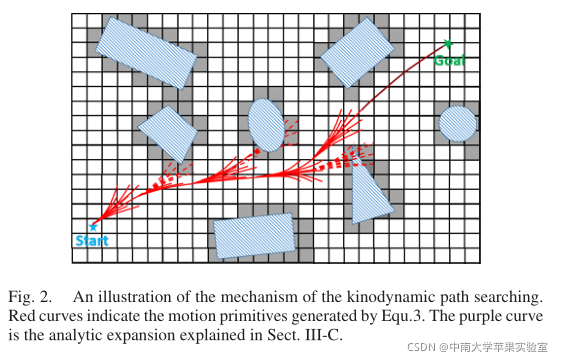
Purple line : Because the end of the search is difficult to just fall on the target , Each time from open set After the node pops up , Calculate a track from the current point to the end point , If the trajectory passes the safety and feasibility check , The search is terminated in advance .
Sports primitives
Using the optimal control formula to generate motion primitives


heuristic
Using Pontryagin's minimum principle , To calculate the J(t) To minimize the xc To the target state xg Track of

Back end trajectory optimization
B Spline trajectory optimization

The trajectory consists of b Spline representation (pb = 3).
Its first derivative ( Speed ) Still convex .



The red curve is the initial path , The green curve is optimized b Splines . Yellow nodes representative b Control points of splines . Because the distance information is ignored , The initial path approaches the obstacle , Need to combine gradient information , use B Spline optimization pushes the trajectory away .
Loss function

Smoothness guarantee

Make the track smooth
Reliability guarantee

d(Qi): The distance from the control point to the nearest obstacle
Move the track away from the obstacle
Dynamic feasibility guarantee

Time adjustment
The basic reason is that gradient information tends to lengthen the whole trajectory , And push it away from obstacles . therefore , The original time allocation may make some trajectories infeasible ( Excessive speed and acceleration ).
resolvent : Make time adjustments , To make the velocity and acceleration on the trajectory below the maximum limit
It is assumed that the control point of the speed curve exceeds the feasibility constraint , You only need to control the interval of the node vector between the initial control points , You can reduce the part that exceeds the speed threshold .

If  , Then speed will be feasible . because :
, Then speed will be feasible . because :

Acceleration optimization is the same .

Overall process

Is to calculate the motion primitive at each point , Then iterate the points in the motion primitive to calculate the motion primitive , In this process, use A Algorithm to calculate and search the path . And then use it b Spline curve to match the obtained A Path optimization .
result
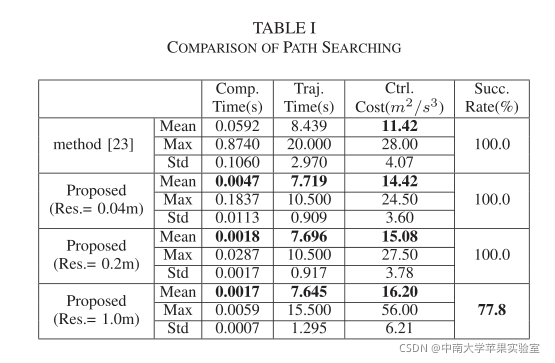
The front-end trajectory generates contrast :
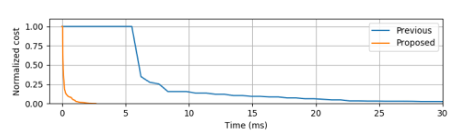
Back end trajectory optimization comparison :


conclusion
A novel on-line motion planning method for four rotor autonomous navigation is proposed in this paper . The online fast motion planning problem is decomposed into front-end dynamic path search and back-end nonlinear trajectory optimization . The dynamic path search algorithm is used to find the safe path 、 Dynamic feasible and shortest initial path , The smoothness and gap of the initial path are further improved by gradient optimization algorithm .
版权声明
本文为[Apple Laboratory of Central South University]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230626397863.html
边栏推荐
猜你喜欢

MySQL in window10 version does not work after setting remote access permission

FUEL: Fast UAV Exploration using Incremental Frontier Structure and Hierarchical Planning

Unity获取真实地理地图应用Terrain笔记

防抖和节流

H5 local storage data sessionstorage, localstorage

Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments

Date object (JS built-in object)

King glory - unity learning journey

中间人环境mitmproxy搭建

Shapley Explanation Networks
随机推荐
Mongodb 启动警告信息处理
对复杂字典Dictionary<T1,T2>排序问题
canvas学习第一篇
取得所有点列表中的最大值GetMaxPoint
Encapsulate the debug function of unity
js之什么是事件?事件三要素以及操作元素
C#控制相机,旋转,拖拽观察脚本(类似Scenes观察方式)
MySQL in window10 version does not work after setting remote access permission
Houdini>建筑道路可变,学习过程笔记
Rethink | open the girl heart mode of station B and explore the design and implementation of APP skin changing mechanism
Index locked data cannot be written to es problem handling
Nodejs (I) event driven programming
SampleCameraFilter
【NLP笔记】CRF原理初探
Event system (II) multicast events
Gets the maximum getmaxpoint in the list of all points
庄懂的TA笔记(零)<铺垫与学习方法>
H5 local storage data sessionstorage, localstorage
系统与软件安全研究(一)
How does Apache Hudi accelerate traditional batch mode?