当前位置:网站首页>SCNet:Semantic Consistency Networks for 3D Object Detection
SCNet:Semantic Consistency Networks for 3D Object Detection
2022-08-11 05:23:00 【zhSunw】
框架采用VoteNet和PointNet++作为pipeline.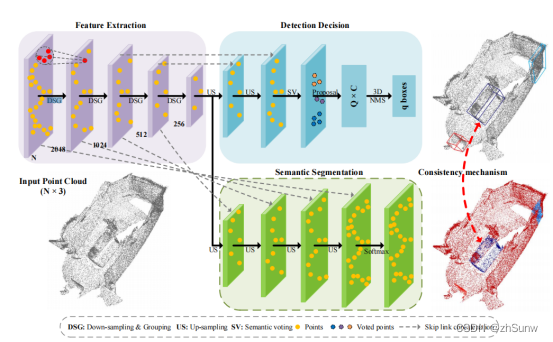
- Semantic Voting:将语义信息也作为每个点投票(预测)的信息
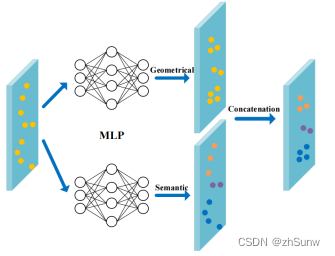
- 两个MLP分支分别完成正常VoteNet的投票(xyz坐标与feature特征)和Semantic Vote
- 将每个点的两个分支预测结果相结合
- Loss Function

设置超参数权重对各个任务loss进行加权 - Semantic Consistency Mechanism and Loss
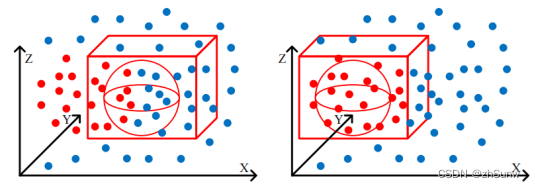
如上图所示,以每个BBox的中心为球心,设置半径为0.2m的球内的点进行语义一致性loss计算: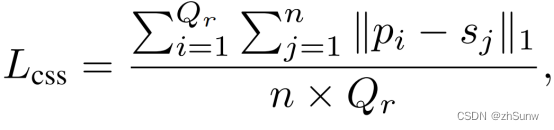
pi为BBox的预测概率,sj为每个查询点的语义信息。
可以使得模型能够学习到几何信息和语义信息之间的关系,让预测BBOX更准确。
边栏推荐
猜你喜欢




随机推荐
Laravel5.7反序列化
BGP联邦实验
ES6 模块化
电脑推荐软件
Nodered系列—使用mqtt写入国产数据库tDengine
解决SmartRefreshLayout/SwipeRefreshLayout与RecyclerView下拉冲突的问题
正则(三剑客和文本处理工具)
Socket 网络协议 等
Redis哨兵模式
LNMP源码搭建
emqx安装及mqttx连接使用
GBase 8s是如何保证数据一致性
DAPP系统开发及智能合约实现技术
GBase 8s中IO读写方法
《现代密码学》学习笔记——第三章 分组密码
Nodered系列—写入tDengine超级表,自动创建子表
云计算学习笔记——第五章 网络虚拟化
二,八,十,十六进制转换
Promise
函数:万能的百宝箱