当前位置:网站首页>多种深度模型实现手写字母MNIST的识别(CNN,RNN,DNN,逻辑回归,CRNN,LSTM/Bi-LSTM,GRU/Bi-GRU)
多种深度模型实现手写字母MNIST的识别(CNN,RNN,DNN,逻辑回归,CRNN,LSTM/Bi-LSTM,GRU/Bi-GRU)
2022-08-10 18:23:00 【王延凯的博客】
多种深度模型实现手写字母MNIST的识别(CNN,RNN,DNN,逻辑回归,CRNN,LSTM/Bi-LSTM,GRU/Bi-GRU
1.CNN模型
1.1 代码
import torch
import torch.nn as nn
from torch.autograd import Variable
import torch.utils.data as Data
import torchvision
import matplotlib.pyplot as plt
# Hyper prameters
EPOCH = 1
BATCH_SIZE = 50
LR = 0.001
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist',
train=True,
transform=torchvision.transforms.ToTensor(), # 将下载的文件转换成pytorch认识的tensor类型,且将图片的数值大小从(0-255)归一化到(0-1)
download=DOWNLOAD_MNIST
)
# 画一个图片显示出来
# print(train_data.data.size())
# print(train_data.targets.size())
# plt.imshow(train_data.data[0].numpy(),cmap='gray')
# plt.title('%i'%train_data.targets[0])
# plt.show()
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
test_data = torchvision.datasets.MNIST(
root='./mnist',
train=False,
)
with torch.no_grad():
test_x = Variable(torch.unsqueeze(test_data.data, dim=1)).type(torch.FloatTensor)[
:2000] / 255 # 只取前两千个数据吧,差不多已经够用了,然后将其归一化。
test_y = test_data.targets[:2000]
'''开始建立CNN网络'''
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
'''
一般来说,卷积网络包括以下内容:
1.卷积层
2.神经网络
3.池化层
'''
self.conv1 = nn.Sequential(
nn.Conv2d( # --> (1,28,28)
in_channels=1, # 传入的图片是几层的,灰色为1层,RGB为三层
out_channels=16, # 输出的图片是几层
kernel_size=5, # 代表扫描的区域点为5*5
stride=1, # 就是每隔多少步跳一下
padding=2, # 边框补全,其计算公式=(kernel_size-1)/2=(5-1)/2=2
), # 2d代表二维卷积 --> (16,28,28)
nn.ReLU(), # 非线性激活层
nn.MaxPool2d(kernel_size=2), # 设定这里的扫描区域为2*2,且取出该2*2中的最大值 --> (16,14,14)
)
self.conv2 = nn.Sequential(
nn.Conv2d( # --> (16,14,14)
in_channels=16, # 这里的输入是上层的输出为16层
out_channels=32, # 在这里我们需要将其输出为32层
kernel_size=5, # 代表扫描的区域点为5*5
stride=1, # 就是每隔多少步跳一下
padding=2, # 边框补全,其计算公式=(kernel_size-1)/2=(5-1)/2=
), # --> (32,14,14)
nn.ReLU(),
nn.MaxPool2d(kernel_size=2), # 设定这里的扫描区域为2*2,且取出该2*2中的最大值 --> (32,7,7),这里是三维数据
)
self.out = nn.Linear(32 * 7 * 7, 10) # 注意一下这里的数据是二维的数据
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x) # (batch,32,7,7)
# 然后接下来进行一下扩展展平的操作,将三维数据转为二维的数据
x = x.view(x.size(0), -1) # (batch ,32 * 7 * 7)
output = self.out(x)
return output
cnn = CNN()
# print(cnn)
# 添加优化方法
optimizer = torch.optim.Adam(cnn.parameters(), lr=LR)
# 指定损失函数使用交叉信息熵
loss_fn = nn.CrossEntropyLoss()
'''
开始训练我们的模型哦
'''
step = 0
for epoch in range(EPOCH):
# 加载训练数据
for step, data in enumerate(train_loader):
x, y = data
# 分别得到训练数据的x和y的取值
b_x = Variable(x)
b_y = Variable(y)
output = cnn(b_x) # 调用模型预测
loss = loss_fn(output, b_y) # 计算损失值
optimizer.zero_grad() # 每一次循环之前,将梯度清零
loss.backward() # 反向传播
optimizer.step() # 梯度下降
# 每执行50次,输出一下当前epoch、loss、accuracy
if (step % 50 == 0):
# 计算一下模型预测正确率
test_output = cnn(test_x)
y_pred = torch.max(test_output, 1)[1].data.squeeze()
accuracy = sum(y_pred == test_y).item() / test_y.size(0)
print('now epoch : ', epoch, ' | loss : %.4f ' % loss.item(), ' | accuracy : ', accuracy)
'''
打印十个测试集的结果
'''
test_output = cnn(test_x[:10])
y_pred = torch.max(test_output, 1)[1].data.squeeze() # 选取最大可能的数值所在的位置
print(y_pred.tolist(), 'predecton Result')
print(test_y[:10].tolist(), 'Real Result')
1.2 运行结果

2.RNN模型
2.1 LSTM/Bi-LSTM
import torch
from torch import nn
import torchvision.datasets as dsets
import torchvision.transforms as transforms
# import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # train the training data n times, to save time, we just train 1 epoch
BATCH_SIZE = 64
TIME_STEP = 28 # rnn time step / image height
INPUT_SIZE = 28 # rnn input size / image width
LR = 0.01 # learning rate
DOWNLOAD_MNIST = True # set to True if haven't download the data
# Mnist digital dataset
train_data = dsets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST, # download it if you don't have it
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
# plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
# plt.title('%i' % train_data.train_labels[0])
# plt.show()
# Data Loader for easy mini-batch return in training
train_loader = torch.utils.data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# convert test data into Variable, pick 2000 samples to speed up testing
test_data = dsets.MNIST(root='./mnist/', train=False, transform=transforms.ToTensor())
test_x = test_data.test_data.type(torch.FloatTensor)[:2000]/255. # shape (2000, 28, 28) value in range(0,1)
test_y = test_data.test_labels.numpy()[:2000] # covert to numpy array
class RNN(nn.Module):
def __init__(self):
super(RNN, self).__init__()
self.rnn = nn.LSTM( # if use nn.RNN(), it hardly learns
input_size=INPUT_SIZE,
hidden_size=64, # rnn hidden unit
num_layers=1, # number of rnn layer
batch_first=True, # input & output will has batch size as 1s dimension. e.g. (batch, time_step, input_size)
bidirectional=False, #如果是Bi-LSTM的话,需要将bidirectional设置为True,并将下一行的(64,10)改为(64*2,10)
#如果是LSTM的话,保持此设置即可。
)
self.out = nn.Linear(64, 10)
def forward(self, x):
# x shape (batch, time_step, input_size)
# r_out shape (batch, time_step, output_size)
# h_n shape (n_layers, batch, hidden_size)
# h_c shape (n_layers, batch, hidden_size)
r_out, (h_n, h_c) = self.rnn(x, None) # None represents zero initial hidden state
# print('1111111',x.size())
# choose r_out at the last time step
out = self.out(r_out[:, -1, :])
return out
rnn = RNN()
print(rnn)
optimizer = torch.optim.Adam(rnn.parameters(), lr=LR) # optimize all cnn parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# training and testing
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # gives batch data
# print('000',b_x.size())
b_x = b_x.view(-1, 28, 28) # reshape x to (batch, time_step, input_size)
# print("222",b_x.size())
output = rnn(b_x) # rnn output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if step % 50 == 0:
test_output = rnn(test_x) # (samples, time_step, input_size)
pred_y = torch.max(test_output, 1)[1].data.numpy()
accuracy = float((pred_y == test_y).astype(int).sum()) / float(test_y.size)
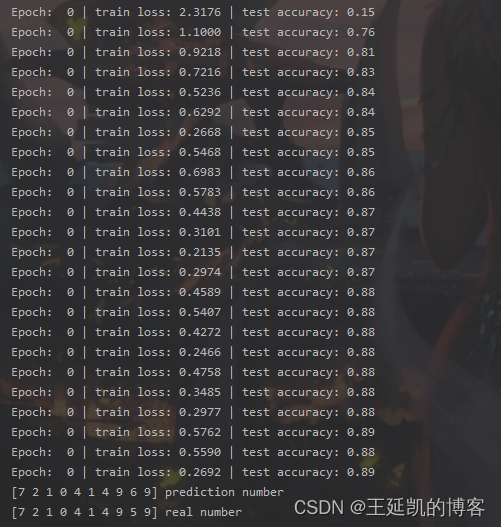
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
# print 10 predictions from test data
test_output = rnn(test_x[:10].view(-1, 28, 28))
pred_y = torch.max(test_output, 1)[1].data.numpy()
print(pred_y, 'prediction number')
print(test_y[:10], 'real number')
2.2 运行结果
| LSTM | Bi-LSTM |
|---|---|
 |  |
2.3GRU/Bi-GRU
import time,os
import math
import torch
import torchvision
import torch.nn as nn
import torch.utils.data as Data
import matplotlib.pyplot as plt
class GRUCell(nn.Module):
"""Gated recurrent unit (GRU) cell"""
def __init__(self, input_size, hidden_size):
super(GRUCell, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_size
self.weight_ih = nn.Parameter(torch.Tensor(input_size, hidden_size * 3))
self.weight_hh = nn.Parameter(torch.Tensor(hidden_size, hidden_size * 3))
self.bias_ih = nn.Parameter(torch.Tensor(hidden_size * 3))
self.bias_hh = nn.Parameter(torch.Tensor(hidden_size * 3))
self.init_parameters()
def init_parameters(self):
stdv = 1.0 / math.sqrt(self.hidden_size)
for param in self.parameters():
nn.init.uniform_(param, -stdv, stdv)
def forward(self, x, h_t_minus_1):
idx = self.hidden_size * 2
gates_ih = torch.mm(x, self.weight_ih) + self.bias_ih
gates_hh = torch.mm(h_t_minus_1, self.weight_hh[:, :idx]) + self.bias_hh[:idx]
resetgate_i, updategate_i, output_i = gates_ih.chunk(3, dim=1)
resetgate_h, updategate_h = gates_hh.chunk(2, dim=1)
r = torch.sigmoid(resetgate_i + resetgate_h)
z = torch.sigmoid(updategate_i + updategate_h)
h_tilde = torch.tanh(output_i + (torch.mm((r * h_t_minus_1), self.weight_hh[:, idx:]) + self.bias_hh[idx:]))
h = (1 - z) * h_t_minus_1 + z * h_tilde
return h
class GRU(nn.Module):
"""Multi-layer gated recurrent unit (GRU)"""
def __init__(self, input_size, hidden_size, num_layers=1, batch_first=False):
super(GRU, self).__init__()
self.hidden_size = hidden_size
self.num_layers = num_layers
self.batch_first = batch_first
layers = [GRUCell(input_size, hidden_size)]
for i in range(num_layers - 1):
layers += [GRUCell(hidden_size, hidden_size)]
self.net = nn.Sequential(*layers)
def forward(self, x, init_state=None):
# Input and output size: (seq_length, batch_size, input_size)
# State size: (num_layers, batch_size, hidden_size)
if self.batch_first:
x = x.transpose(0, 1)
self.h = torch.zeros(x.size(0), self.num_layers, x.size(1), self.hidden_size).to(x.device)
if init_state is not None:
self.h[0, :] = init_state
inputs = x
for i, cell in enumerate(self.net): # Layers
h_t = self.h[0, i].clone()
for t in range(x.size(0)): # Sequences
h_t = cell(inputs[t], h_t)
self.h[t, i] = h_t
inputs = self.h[:, i].clone()
if self.batch_first:
return self.h[:, -1].transpose(0, 1), self.h[-1]
return self.h[:, -1], self.h[-1]
# if init_state is not None:
# h_0 = init_state
# else:
# h_0 = torch.zeros(self.num_layers, x.size(1), self.hidden_size).to(x.device)
#
# inputs, outputs, h = x, [], []
# for i, cell in enumerate(self.net): # Layers
# h_t = h_0[i]
# for t in range(x.size(0)): # Sequences
# h_t = cell(inputs[t], h_t)
# outputs += [h_t]
# inputs, outputs = outputs, []
# h += [h_t]
#
# if self.batch_first:
# return torch.stack(inputs).transpose(0, 1), torch.stack(h)
#
# return torch.stack(inputs), torch.stack(h)
class GRUModel(nn.Module):
def __init__(self, input_size, hidden_size, num_layers, output_size):
super(GRUModel, self).__init__()
self.hidden_size = hidden_size
self.num_layers = num_layers
self.gru = GRU(input_size, hidden_size, num_layers, batch_first=True)
self.fc = nn.Linear(hidden_size, output_size)
def forward(self, x):
out, _ = self.gru(x, None)
out = self.fc(out[:, -1, :])
return out
'''
超参数设置
'''
learning_rate = 0.001
num_epochs = 1
BATCH_SIZE = 50
print_step = 200
num_layers = 3
input_size = 28
time_step = 28
hidden_size = 128
output_size = 10
DOWNLOAD_MNIST = True
# Mnist digits dataset
if not(os.path.exists('./mnist/')) or not os.listdir('./mnist/'):
# not mnist dir or mnist is empyt dir
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST,
)
test_data = torchvision.datasets.MNIST(
root='./mnist/',
train=False, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST,
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
# plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
# plt.title('%i' % train_data.train_labels[0])
# plt.show()
# Data Loader for easy mini-batch return in training, the image batch shape will be (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# pick 2000 samples to speed up testing
# test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
test_loader = Data.DataLoader(dataset=test_data, batch_size=BATCH_SIZE, shuffle=True)
# for data,labels in test_loader:
# print(data,labels)
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = GRUModel(input_size, hidden_size, num_layers, output_size).to(device)
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
start = time.time()
steps = len(train_loader)
test_total = len(test_loader.dataset)
print('Train on {} samples, test on {} samples'.format(len(train_loader.dataset), test_total))
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch + 1, num_epochs))
running_loss = 0.0
corrects = 0
total = 0
for i, (inputs, labels) in enumerate(train_loader):
inputs = inputs.view(-1, time_step, input_size).to(device)
labels = labels.to(device, non_blocking=True)
# Clear the gradients
optimizer.zero_grad()
# Forward pass
outputs = model(inputs)
loss = criterion(outputs, labels)
# Backward and optimize
loss.backward()
optimizer.step()
# Statistics
running_loss += loss.item() * inputs.size(0)
_, preds = torch.max(outputs, 1)
corrects += torch.sum(preds == labels).item()
total += inputs.size(0)
if (i + 1) % print_step == 0 or (i + 1) == steps:
# Test phase
test_running_loss = 0.0
test_corrects = 0
for inputs, labels in test_loader:
inputs = inputs.view(-1, time_step, input_size).to(device)
labels = labels.to(device)
# Prevent tracking history
with torch.no_grad():
outputs = model(inputs)
loss = criterion(outputs, labels)
test_running_loss += loss.item() * inputs.size(0)
_, preds = torch.max(outputs, 1)
test_corrects += torch.sum(preds == labels).item()
train_acc = corrects / total
train_loss = running_loss / total
test_acc = test_corrects / test_total
test_loss = test_running_loss / test_total
print('step: {}/{} - loss: {:.4f} - acc: {:.3f} - test_loss: {:.4f} - test_acc: {:.3f}'.format(
i + 1, steps, train_loss, train_acc, test_loss, test_acc))
elapsed_time = time.time() - start
print('Training complete in {:.0f}m {:.0f}s'.format(elapsed_time // 60, elapsed_time % 60))
inputs = inputs.cpu().numpy()
preds = preds.cpu().numpy()
labels = labels.cpu().numpy()
n_rows, n_cols = (2, 8)
plt.figure(figsize=(n_cols, n_rows))
for i in range(n_rows * n_cols):
plt.subplot(n_rows, n_cols, i + 1)
plt.axis('off')
plt.title(preds[i])
plt.imshow(inputs[i], cmap='gray')
plt.tight_layout()
plt.show()
3.DNN模型
3.1 代码
import os
import torch
import torchvision
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.data as Data
class mnist_DNN_model(nn.Module):
def __init__(self):
super(mnist_DNN_model, self).__init__()
self.model_path = 'torch_model'
self.model_name = 'mnist_DNN_model'
self.dropout_p = 0.5
self.sequential_1 = nn.Sequential(
nn.Linear(28*28, 512),
nn.BatchNorm1d(512),
nn.ReLU(),
nn.Dropout(self.dropout_p)
)
self.fc_2 = nn.Linear(512, 256)
self.bn_2 = nn.BatchNorm1d(256)
self.d_3 = nn.Dropout(self.dropout_p)
self.fc_3 = nn.Linear(256, 128)
self.bn_3 = nn.BatchNorm1d(128)
self.d_3 = nn.Dropout(self.dropout_p)
self.fc_oupt = nn.Linear(128, 10)
def forward(self, x):
re_x = x.view((-1, 28*28))
fc_1 = self.sequential_1(re_x)
fc_2 = self.fc_2(fc_1)
bn_2 = F.relu(self.bn_2(fc_2))
d_2 = self.d_3(bn_2)
fc_3 = self.fc_3(d_2)
bn_3 = F.elu(self.bn_3(fc_3))
d_3 = self.d_3(bn_3)
fc_oupt = self.fc_oupt(d_3)
return F.log_softmax(fc_oupt)
# Hyper Parameters
EPOCH = 1 # train the training data n times, to save time, we just train 1 epoch
BATCH_SIZE = 50
LR = 0.001 # learning rate
DOWNLOAD_MNIST = False
# Mnist digits dataset
if not(os.path.exists('./mnist/')) or not os.listdir('./mnist/'):
# not mnist dir or mnist is empyt dir
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST,
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
# plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
# plt.title('%i' % train_data.train_labels[0])
# plt.show()
# Data Loader for easy mini-batch return in training, the image batch shape will be (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# pick 2000 samples to speed up testing
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = mnist_DNN_model().to(device)
print(model)
optimizer = torch.optim.Adam(model.parameters(), lr=LR) # optimize all logistic parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # gives batch data, normalize x when iterate train_loader
# print(b_x.size())
# b_x = b_x.view(-1, 28*28)
# print(b_x.size())
output = model(b_x) # logistic output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if step % 50 == 0:
test_output = model(test_x)
pred_y = torch.max(test_output, 1)[1].data.numpy()
accuracy = float((pred_y == test_y.data.numpy()).astype(int).sum()) / float(test_y.size(0))
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
# if HAS_SK:
# # Visualization of trained flatten layer (T-SNE)
# tsne = TSNE(perplexity=30, n_components=2, init='pca', n_iter=5000)
# plot_only = 500
# low_dim_embs = tsne.fit_transform(last_layer.data.numpy()[:plot_only, :])
# labels = test_y.numpy()[:plot_only]
# plot_with_labels(low_dim_embs, labels)
# plt.ioff()
# print 10 predictions from test data
test_output = model(test_x[:10])
pred_y = torch.max(test_output, 1)[1].data.numpy()
print(pred_y, 'prediction number')
print(test_y[:10].numpy(), 'real number')
3.2 运行结果

4.逻辑回归模型
4.1 代码
import os
import torch
import torch.nn as nn
import torch.utils.data as Data
import torchvision
# import matplotlib.pyplot as plt
# torch.manual_seed(1) # reproducible
# Hyper Parameters
EPOCH = 1 # train the training data n times, to save time, we just train 1 epoch
BATCH_SIZE = 50
LR = 0.001 # learning rate
DOWNLOAD_MNIST = False
# Mnist digits dataset
if not(os.path.exists('./mnist/')) or not os.listdir('./mnist/'):
# not mnist dir or mnist is empyt dir
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist/',
train=True, # this is training data
transform=torchvision.transforms.ToTensor(), # Converts a PIL.Image or numpy.ndarray to
# torch.FloatTensor of shape (C x H x W) and normalize in the range [0.0, 1.0]
download=DOWNLOAD_MNIST,
)
# plot one example
print(train_data.train_data.size()) # (60000, 28, 28)
print(train_data.train_labels.size()) # (60000)
# plt.imshow(train_data.train_data[0].numpy(), cmap='gray')
# plt.title('%i' % train_data.train_labels[0])
# plt.show()
# Data Loader for easy mini-batch return in training, the image batch shape will be (50, 1, 28, 28)
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
# pick 2000 samples to speed up testing
test_data = torchvision.datasets.MNIST(root='./mnist/', train=False)
test_x = torch.unsqueeze(test_data.test_data, dim=1).type(torch.FloatTensor)[:2000]/255. # shape from (2000, 28, 28) to (2000, 1, 28, 28), value in range(0,1)
test_y = test_data.test_labels[:2000]
class logisticRg(nn.Module):
def __init__(self):
super(logisticRg, self).__init__()
self.lr = nn.Sequential(
nn.Linear(28*28,10)
)
def forward(self, x):
output = self.lr(x)
return output, x # return x for visualization
lor = logisticRg()
print(lor) # net architecture
optimizer = torch.optim.Adam(lor.parameters(), lr=LR) # optimize all logistic parameters
loss_func = nn.CrossEntropyLoss() # the target label is not one-hotted
# following function (plot_with_labels) is for visualization, can be ignored if not interested
# from matplotlib import cm
# try: from sklearn.manifold import TSNE; HAS_SK = True
# except: HAS_SK = False; print('Please install sklearn for layer visualization')
# def plot_with_labels(lowDWeights, labels):
# plt.cla()
# X, Y = lowDWeights[:, 0], lowDWeights[:, 1]
# for x, y, s in zip(X, Y, labels):
# c = cm.rainbow(int(255 * s / 9)); plt.text(x, y, s, backgroundcolor=c, fontsize=9)
# plt.xlim(X.min(), X.max()); plt.ylim(Y.min(), Y.max()); plt.title('Visualize last layer'); plt.show(); plt.pause(0.01)
# plt.ion()
# training and testing
for epoch in range(EPOCH):
for step, (b_x, b_y) in enumerate(train_loader): # gives batch data, normalize x when iterate train_loader
# print(b_x.size())
b_x = b_x.view(-1, 28*28)
# print(b_x.size())
output = lor(b_x)[0] # logistic output
loss = loss_func(output, b_y) # cross entropy loss
optimizer.zero_grad() # clear gradients for this training step
loss.backward() # backpropagation, compute gradients
optimizer.step() # apply gradients
if step % 50 == 0:
test_output, last_layer = lor(test_x.view(-1,28*28))
pred_y = torch.max(test_output, 1)[1].data.numpy()
accuracy = float((pred_y == test_y.data.numpy()).astype(int).sum()) / float(test_y.size(0))
print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)
# if HAS_SK:
# # Visualization of trained flatten layer (T-SNE)
# tsne = TSNE(perplexity=30, n_components=2, init='pca', n_iter=5000)
# plot_only = 500
# low_dim_embs = tsne.fit_transform(last_layer.data.numpy()[:plot_only, :])
# labels = test_y.numpy()[:plot_only]
# plot_with_labels(low_dim_embs, labels)
# plt.ioff()
# print 10 predictions from test data
test_output, _ = lor(test_x[:10].view(-1,28*28))
pred_y = torch.max(test_output, 1)[1].data.numpy()
print(pred_y, 'prediction number')
print(test_y[:10].numpy(), 'real number')
4.2 运行结果
5.CRNN模型(CNN-LSTM/CNN-Bi-LSTM)
5.1代码
import torch
import torch.nn as nn
from torch.autograd import Variable
import torch.utils.data as Data
import torchvision
import matplotlib.pyplot as plt
# Hyper prameters
EPOCH = 1
BATCH_SIZE = 50
LR = 0.0001
DOWNLOAD_MNIST = True
train_data = torchvision.datasets.MNIST(
root='./mnist',
train=True,
transform=torchvision.transforms.ToTensor(), # 将下载的文件转换成pytorch认识的tensor类型,且将图片的数值大小从(0-255)归一化到(0-1)
download=DOWNLOAD_MNIST
)
# 画一个图片显示出来
# print(train_data.data.size())
# print(train_data.targets.size())
# plt.imshow(train_data.data[0].numpy(),cmap='gray')
# plt.title('%i'%train_data.targets[0])
# plt.show()
train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True)
test_data = torchvision.datasets.MNIST(
root='./mnist',
train=False,
)
with torch.no_grad():
test_x = Variable(torch.unsqueeze(test_data.data, dim=1)).type(torch.FloatTensor)[
:2000] / 255 # 只取前两千个数据吧,差不多已经够用了,然后将其归一化。
test_y = test_data.targets[:2000]
'''开始建立CNN网络'''
class CRNN(nn.Module):
def __init__(self):
super(CRNN, self).__init__()
'''
一般来说,卷积网络包括以下内容:
1.卷积层
2.神经网络
3.池化层
'''
self.conv1 = nn.Sequential(
nn.Conv2d( # --> (1,28,28)
in_channels=1, # 传入的图片是几层的,灰色为1层,RGB为三层
out_channels=16, # 输出的图片是几层
kernel_size=5, # 代表扫描的区域点为5*5
stride=1, # 就是每隔多少步跳一下
padding=2, # 边框补全,其计算公式=(kernel_size-1)/2=(5-1)/2=2
), # 2d代表二维卷积 --> (16,28,28)
nn.ReLU(), # 非线性激活层
nn.MaxPool2d(kernel_size=2), # 设定这里的扫描区域为2*2,且取出该2*2中的最大值 --> (16,14,14)
)
self.conv2 = nn.Sequential(
nn.Conv2d( # --> (16,14,14)
in_channels=16, # 这里的输入是上层的输出为16层
out_channels=49, # 在这里我们需要将其输出为32层
kernel_size=5, # 代表扫描的区域点为5*5
stride=1, # 就是每隔多少步跳一下
padding=2, # 边框补全,其计算公式=(kernel_size-1)/2=(5-1)/2=
), # --> (32,14,14)
nn.ReLU(),
nn.MaxPool2d(kernel_size=2), # 设定这里的扫描区域为2*2,且取出该2*2中的最大值 --> (32,7,7),这里是三维数据
)
self.lstm=nn.LSTM(input_size=49,hidden_size=100,num_layers=1,bidirectional=False) #输入为32*7*7,隐藏层为100,双向
self.out = nn.Linear(100, 10) # 注意一下这里的数据是二维的数据
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x) # (batch,32,7,7)
# 然后接下来进行一下扩展展平的操作,将三维数据转为二维的数据
# print("000",x.size())
# x = x.view(x.size(0), -1) # (batch ,32 * 7 * 7)
x=x.reshape(x.size(0),7*7,7*7)
# print('111',x.size())
# print('222',y.size())
r_out, (h_n, h_c)=self.lstm(x) #这里需要输入三维数据,应该为(batch,*,*)
# print("333",r_out.size())
output = self.out(r_out[:, -1, :])
return output
crnn = CRNN()
# print(cnn)
# 添加优化方法
optimizer = torch.optim.Adam(crnn.parameters(), lr=LR)
# 指定损失函数使用交叉信息熵
loss_fn = nn.CrossEntropyLoss()
'''
开始训练我们的模型哦
'''
step = 0
for epoch in range(EPOCH):
# 加载训练数据
for step, data in enumerate(train_loader):
x, y = data
# 分别得到训练数据的x和y的取值
b_x = Variable(x)
b_y = Variable(y)
output = crnn(b_x) # 调用模型预测
loss = loss_fn(output, b_y) # 计算损失值
optimizer.zero_grad() # 每一次循环之前,将梯度清零
loss.backward() # 反向传播
optimizer.step() # 梯度下降
# 每执行50次,输出一下当前epoch、loss、accuracy
if (step % 50 == 0):
# 计算一下模型预测正确率
test_output = crnn(test_x)
y_pred = torch.max(test_output, 1)[1].data.squeeze()
accuracy = sum(y_pred == test_y).item() / test_y.size(0)
print('now epoch : ', epoch, ' | loss : %.4f ' % loss.item(), ' | accuracy : ', accuracy)
'''
打印十个测试集的结果
'''
test_output = crnn(test_x[:10])
y_pred = torch.max(test_output, 1)[1].data.squeeze() # 选取最大可能的数值所在的位置
print(y_pred.tolist(), 'predecton Result')
print(test_y[:10].tolist(), 'Real Result')
5.2 运行结果

边栏推荐
猜你喜欢

Xilinx FPGA收发器参考时钟设计应用

Toronto Research Chemicals BTK抑制剂丨ACP-5197
【图像分割】基于元胞自动机实现图像分割附matlab代码
Major upgrade of MSE Governance Center - Traffic Governance, Database Governance, Same AZ Priority
三星Galaxy Watch5产品图片流出 非Pro表款亦有蓝宝石加持
Go 语言快速入门指南:第四篇 与数据为舞之数组

阿里云贾朝辉:云 XR 平台支持彼真科技呈现国风科幻虚拟演唱会

宝塔部署flask项目
Keil5退出仿真调试卡死的解决办法

运维如何学习、自我提升价值?

随机推荐
消息队列初见:一起聊聊引入系统mq 之后的问题
欧洲核子研究中心首次在量子机器学习研究中取得实效
FPGA工程师面试试题集锦81~90
websocket校验token:使用threadlocal存放和获取当前登录用户
智能出价策略如何影响广告效果?
flex&bison系列第一章:flex Hello World
接口测试进阶接口脚本使用—apipost(预/后执行脚本)
破解校园数字安全难点,联想推出智慧教育安全体系
装饰者模式
FlexSim仿真软件入门笔记:基本操作、快捷键
从企业的视角来看,数据中台到底意味着什么?
三星Galaxy Watch5产品图片流出 非Pro表款亦有蓝宝石加持
幕维三维动画——港珠澳大桥沉管安装三维动画实况
【深度学习21天学习挑战赛】4、初尝循环神经网络(RNN)——股票预测
多线程与高并发(五)—— 源码解析 ReentrantLock
开源一夏 | mysql5.7 安装部署 -二进制安装
漫谈测试成长之探索——测试文档
一小时搞定 简单VBA编程 Excel宏编程快速扫盲
flex使用align-content无效
MySQL安装步骤