当前位置:网站首页>FOC电机库 定点PID代码分析
FOC电机库 定点PID代码分析
2022-04-23 05:50:00 【tilblackout】
代码来源于STM32 FOC电机库中的pid_regulator.c。
PID结构体
typedef struct PID_Handle
{
int16_t hDefKpGain; /**< Default @f$K_{pg}@f$ gain */
int16_t hDefKiGain; /**< Default @f$K_{ig}@f$ gain */
int16_t hKpGain; /**< @f$K_{pg}@f$ gain used by PID component */
int16_t hKiGain; /**< @f$K_{ig}@f$ gain used by PID component */
int32_t wIntegralTerm; /**< integral term */
int32_t wUpperIntegralLimit; /**< Upper limit used to saturate the integral
term given by @f$\frac{K_{ig}}{K_{id}} @f$ * integral of
process variable error */
int32_t wLowerIntegralLimit; /**< Lower limit used to saturate the integral
term given by Ki / Ki divisor * integral of
process variable error */
int16_t hUpperOutputLimit; /**< Upper limit used to saturate the PI output */
int16_t hLowerOutputLimit; /**< Lower limit used to saturate the PI output */
uint16_t hKpDivisor; /**< Kp gain divisor, used in conjuction with
Kp gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKiDivisor; /**< Ki gain divisor, used in conjuction with
Ki gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKpDivisorPOW2; /**< Kp gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
uint16_t hKiDivisorPOW2; /**< Ki gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
int16_t hDefKdGain; /**< Default Kd gain */
int16_t hKdGain; /**< Kd gain used by PID component */
uint16_t hKdDivisor; /**< Kd gain divisor, used in conjuction with
Kd gain allows obtaining fractional values.
If FULL_MISRA_C_COMPLIANCY is not defined
the divisor is implemented through
algebrical right shifts to speed up PI
execution. Only in this case this parameter
specifies the number of right shifts to be
executed */
uint16_t hKdDivisorPOW2; /*!< Kd gain divisor expressed as power of 2.
E.g. if gain divisor is 512 the value
must be 9 as 2^9 = 512 */
int32_t wPrevProcessVarError; /*!< previous process variable used by the
derivative part of the PID component */
} PID_Handle_t;- 变量命名的开头:h表示half word,w表示word。
(1)hKpGain、hKiGain、hKdGain
- 代码中用到的PID增益参数
(2)hDefKpGain、hDefKiGain、hDefKdGain
- 默认PID增益设置,在电机初始化时设置给hKpGain、hKiGain、hKdGain。个人感觉没必要再用这三个变量,老版本的ST电机库也没有这些参数。
(3)wIntegralTerm
- 积分项
(4)wPrevProcessVarError
- 微分项需要记录的每次的误差
(5)wUpperIntegralLimit、wLowerIntegralLimit
- 积分项最大值限制、积分项最小值限制
(6)hUpperOutputLimit、hLowerOutputLimit
- PID输出最大值限制、PID输出最小值限制
(7)hKpDivisor、hKiDivisor、hKdDivisor
- PID的增益参数应该是小数,而定点PID的增益是整数,需要除以一个比例
(8)hKpDivisorPOW2、hKiDivisorPOW2、hKdDivisorPOW2
- CPU算除法效率不太高,所以上面的PID增益的除数一般设置为
 ,对应
,对应 ,这样在代码中算术右移,这样大大提高了运算速率。
,这样在代码中算术右移,这样大大提高了运算速率。
 ,对应
,对应 ,这样在代码中算术右移,这样大大提高了运算速率。
,这样在代码中算术右移,这样大大提高了运算速率。PID函数实现
有的控制不需要用到微分项,所以ST将PID函数分为PI控制函数和PID控制函数。代码很简单,具体参考注释。
PI控制函数
__weak int16_t PI_Controller( PID_Handle_t * pHandle, int32_t wProcessVarError )
{
int32_t wProportional_Term, wIntegral_Term, wOutput_32, wIntegral_sum_temp;
int32_t wDischarge = 0;
int16_t hUpperOutputLimit = pHandle->hUpperOutputLimit;
int16_t hLowerOutputLimit = pHandle->hLowerOutputLimit;
/* 计算比例项 */
wProportional_Term = pHandle->hKpGain * wProcessVarError;
/* 计算积分项 */
if ( pHandle->hKiGain == 0 )
{
/* 积分增益为0,清空之前的积分项 */
pHandle->wIntegralTerm = 0;
}
else
{
/* 积分增益非0,计算本次误差的积分 */
wIntegral_Term = pHandle->hKiGain * wProcessVarError;
/* 加上之前已经累加的积分 */
wIntegral_sum_temp = pHandle->wIntegralTerm + wIntegral_Term;
/* 判断溢出 */
if ( wIntegral_sum_temp < 0 )
{
if ( pHandle->wIntegralTerm > 0 )
{
if ( wIntegral_Term > 0 )
{
/* 如果本次积分与之前的积分都为正,其和小于0,说明超过了INT32_MAX */
wIntegral_sum_temp = INT32_MAX;
}
}
}
else
{
if ( pHandle->wIntegralTerm < 0 )
{
if ( wIntegral_Term < 0 )
{
/* 如果本次积分与之前的积分都为负,其和大于0,说明超过了-INT32_MAX */
wIntegral_sum_temp = -INT32_MAX;
}
}
}
/* 判断是否超出用户定义的积分限制范围 */
if ( wIntegral_sum_temp > pHandle->wUpperIntegralLimit )
{
pHandle->wIntegralTerm = pHandle->wUpperIntegralLimit;
}
else if ( wIntegral_sum_temp < pHandle->wLowerIntegralLimit )
{
pHandle->wIntegralTerm = pHandle->wLowerIntegralLimit;
}
else
{
pHandle->wIntegralTerm = wIntegral_sum_temp;
}
}
/* 定点PID,需要除以一个比例 */
#ifdef FULL_MISRA_C_COMPLIANCY
wOutput_32 = ( wProportional_Term / ( int32_t )pHandle->hKpDivisor ) + ( pHandle->wIntegralTerm /
( int32_t )pHandle->hKiDivisor );
#else
/* 需要保证编译器对这行代码的处理是算术右移,而不是逻辑右移 */
wOutput_32 = ( wProportional_Term >> pHandle->hKpDivisorPOW2 ) + ( pHandle->wIntegralTerm >> pHandle->hKiDivisorPOW2 );
#endif
/* 判断PID输出结果是否超过用户定义的范围 */
if ( wOutput_32 > hUpperOutputLimit )
{
/* 超过用户定义的最大范围,将本次超过的值赋给wDischarge */
wDischarge = hUpperOutputLimit - wOutput_32;
wOutput_32 = hUpperOutputLimit;
}
else if ( wOutput_32 < hLowerOutputLimit )
{
/* 超过用户定义的最小范围,将本次超过的值赋给wDischarge */
wDischarge = hLowerOutputLimit - wOutput_32;
wOutput_32 = hLowerOutputLimit;
}
else { /* Nothing to do here */ }
/* 将wDischarge赋值给积分项,下一次计算用 */
pHandle->wIntegralTerm += wDischarge;
return ( ( int16_t )( wOutput_32 ) );
}PID控制函数
__weak int16_t PID_Controller( PID_Handle_t * pHandle, int32_t wProcessVarError )
{
int32_t wDifferential_Term;
int32_t wDeltaError;
int32_t wTemp_output;
if ( pHandle->hKdGain != 0 ) /* derivative terms not used */
{
/* 积分项计算本次误差和上次的误差的差值 */
wDeltaError = wProcessVarError - pHandle->wPrevProcessVarError;
/* 计算微分项 */
wDifferential_Term = pHandle->hKdGain * wDeltaError;
#ifdef FULL_MISRA_C_COMPLIANCY
wDifferential_Term /= ( int32_t )pHandle->hKdDivisor;
#else
/* WARNING: the below instruction is not MISRA compliant, user should verify
that Cortex-M3 assembly instruction ASR (arithmetic shift right)
is used by the compiler to perform the shifts (instead of LSR
logical shift right)*/
/* 定点PID,需要除以一个比例 */
wDifferential_Term >>= pHandle->hKdDivisorPOW2;
#endif
/* 记录本次的微分项 */
pHandle->wPrevProcessVarError = wProcessVarError;
/* 计算比例项和积分项,再加上微分项作为本次输出 */
wTemp_output = PI_Controller( pHandle, wProcessVarError ) + wDifferential_Term;
/* 用户定义的范围限制 */
if ( wTemp_output > pHandle->hUpperOutputLimit )
{
wTemp_output = pHandle->hUpperOutputLimit;
}
else if ( wTemp_output < pHandle->hLowerOutputLimit )
{
wTemp_output = pHandle->hLowerOutputLimit;
}
else
{}
}
else
{
/* 微分增益为0,只计算比例项和积分项 */
wTemp_output = PI_Controller( pHandle, wProcessVarError );
}
return ( ( int16_t ) wTemp_output );
}参数调整
应该先调整内环再调整外环。这里定点PID实际应该先调整hKxDivisorPOW2的大小,如果没调好除法项就去调PID的增益,有可能怎么调参数最后PID输出都溢出。
版权声明
本文为[tilblackout]所创,转载请带上原文链接,感谢
https://blog.csdn.net/tilblackout/article/details/121726399
边栏推荐
- sqlite编译
- 深蓝学院激光slam 理论与实践 第三章激光雷达去畸变 作业习题
- 基于VGG卷积神经网络的图像识别代码实现
- C语言数组处理批量数据
- C语言实用小技巧合集(持续更新)
- 实现一个计算m~n(m<n)之间所有整数的和的简单函数
- 大学概率论与数理统计知识点详细整理
- [UDS unified diagnosis service] IV. typical diagnosis service (1) - diagnosis and communication management function unit
- [UDS unified diagnosis service] IV. typical diagnosis service (3) - read fault information function unit (storage data transmission function unit)
- [ThreadX] ThreadX source code reading plan (I)
猜你喜欢
![[UDS unified diagnosis service] IV. typical diagnosis service (1) - diagnosis and communication management function unit](/img/4f/7ca6505b545fb825b0dba36f474da7.png)
[UDS unified diagnosis service] IV. typical diagnosis service (1) - diagnosis and communication management function unit
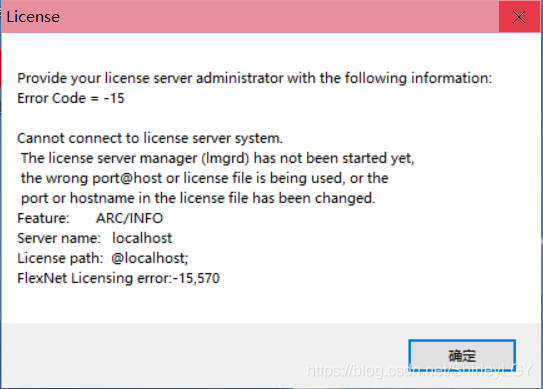
ArcGIS license错误-15解决方法

【UDS统一诊断服务】一、诊断概述(1)— 诊断概述

大学概率论与数理统计知识点详细整理
![[ThreadX] ThreadX source code reading plan (I)](/img/e0/f182a101af24581c808e1d16a0c1fc.jpg)
[ThreadX] ThreadX source code reading plan (I)
Programmers can also write novels
逻辑回归原理及代码实现

【无标题】

cuda工程更换环境(电脑)后遇到的一系列编译问题
Qt 添加QSerialPort类 实现串口操作

随机推荐
1006 finding a mex (hdu6756)
【UDS统一诊断服务】(补充)五、ECU bootloader开发要点详解 (2)
基于VGG对五种类别图片的迁移学习
友元函数,友元类,类模板
利用文件保存数据(c语言)
Call procedure of function
C [document operation] PDF files and pictures are converted to each other
OpenCV使用 GenericIndex 进行 KNN 搜索
Friend function, friend class, class template
[UDS unified diagnostic service] IV. typical diagnostic service (2) - data transmission function unit
修改注册表的值
爬取彩票数据
Uniapp encapsulates request
Opencv uses genericindex for KNN search
PM2 deploy nuxt project
Latex configuration and use
Figure guessing game
卷积神经网络实现CIFAR100数据集分类
PM2 deploy nuxt related commands
类的继承与派生