当前位置:网站首页>Robocode教程7——雷达锁定
Robocode教程7——雷达锁定
2022-04-23 05:45:00 【dawnsun001】
在这次教程中,我们要写这样一个代码,它将让敌人逃不出我们的眼睛。雷达锁定是一个高效战斗机器人的基础,因为robot只有执行onScannedRobot方法,我们才能够获取敌人的信息,而onScannedRobot方法只有在我们的雷达扫描到敌人之后才会被调用,当然,调用的过程是自动的。
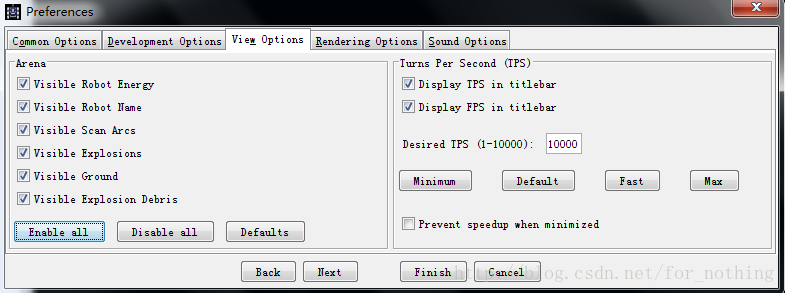
雷达是以机器人为圆心的一条射线,为了更直观,我们最好打开雷达图形显示,方法是:
进入robocode,打开Options-> Preferences->viewoptions,勾选Visible Scan Arcs
还记得我们的Enemy类吗?它在我们的这个机器人中有着至关重要的作用。所以如果不太熟悉class Enemy的话还是先去看看吧。
在Enemy类中有一个direction变量,它的值为:
direction= bearingRadian+ me.getHeadingRadians();

如这张图所示,弄懂了direction变量,雷达锁定就很简单了。
雷达的扫描实际上是一条线,当扫描线扫描到目标时,触发onScannedRobot事件,更新当前数据,包括direction。当程序执行到onScannedRobot内的代码时,雷达扫描线的角度getRadarHeadingRadians()已经和direction有所偏离。为了锁定目标,我们可以把雷达往反方向扫描。因为雷达旋转很快,而且getRadarHeadingRadians()和direction的偏移量不大,机器人是有一定大小的。于是扫描线在目标身上来回扫动,实现了雷达锁定。
public voidonScannedRobot(ScannedRobotEvent e) {
enemy.update(e,this);
doubleOffset = rectify( enemy.direction-getRadarHeadingRadians() );
setTurnRadarRightRadians( Offset * 1.5);
}
这是我们的onScannedRobot方法,enemy.updata(e,this);是调用我们的enemy对象里面的方法,更新敌人信息,当然,忘了一点,在这之前,我们需要生成一个enemy对象,具体方法为:
Enemy enemy = new Enemy();
这里我们还要解释一下rectify方法,它的作用是对角度进行修正,因为direction减去我们雷达的朝向,有可能会大于180度或者小于-180度,比如当大于180度时,我们所需要转动的角度并不需要那么大,只需方向转一个角度就可以了。这个rectify方法很简单,当在后面应用很多。它的代码为:
public double rectify ( doubleangle )
{
if ( angle < -Math.PI )
angle += 2*Math.PI;
if ( angle > Math.PI )
angle -= 2*Math.PI;
return angle;
}
在代码中,enemy.direction -getRadarHeadingRadians()是雷达所要旋转的偏移量。假设之前雷达顺时针扫描,那么enemy.direction略小于getRadarHeadingRadians(),为负。经rectify()方法修正后即为需要转动的值。然后用setTurnRadarRightRadians旋转雷达,旋转度数为偏移的1.5倍,因为RadarOffset为负,故反方向扫描,保证无论目标
如何移动,扫描线始终在目标身上。上面的1.5可以改成2,3等数。当你在Options中打开了Visible Scan Arcs选项后,就可以看到绿色的扇形,倍数为1.5的时候,类似一条线,而倍数为2,3的时候就可以看到像是一个扇形。
另外我们还要说一下另外两段代码:
setAdjustGunForRobotTurn( true );
setAdjustRadarForGunTurn( true );
它们的作用是使雷达、大炮、车身运动独立,具体参考API手册。
到这里我们雷达扫描的代码就完成了,运行试试我们的“观察者号”吧!!

附:观察者号完整代码:
package cm;
import java.awt.*;
import robocode.*;
public class ObserverRobo extends AdvancedRobot
{
Enemy enemy= newEnemy();
public static double PI = Math.PI;
public void run()
{
setAdjustGunForRobotTurn(true);
setAdjustRadarForGunTurn( true );
this.setColors(Color.red, Color.blue, Color.yellow, Color.black, Color.green);
while(true){
if(enemy.name == null){
setTurnRadarRightRadians(2*PI);
execute();
}
else{
execute();
}
}
}
public void onScannedRobot(ScannedRobotEvent e)
{
enemy.update(e,this);
double Offset = rectify( enemy.direction -getRadarHeadingRadians() );
setTurnRadarRightRadians( Offset *1.5);
}
//角度修正方法,重要
public double rectify ( doubleangle )
{
if ( angle < -Math.PI )
angle += 2*Math.PI;
if ( angle > Math.PI )
angle -= 2*Math.PI;
return angle;
}
public class Enemy {
public double x,y;
public String name = null;
public double headingRadian = 0.0D;
public double bearingRadian = 0.0D;
public double distance = 1000D;
public double direction = 0.0D;
public double velocity = 0.0D;
public double prevHeadingRadian = 0.0D;
public double energy = 100.0D;
public void update(ScannedRobotEvent e,AdvancedRobotme){
name = e.getName();
headingRadian =e.getHeadingRadians();
bearingRadian = e.getBearingRadians();
this.energy = e.getEnergy();
this.velocity = e.getVelocity();
this.distance = e.getDistance();
direction = bearingRadian +me.getHeadingRadians();
x = me.getX() + Math.sin( direction ) * distance;
y= me.getY() + Math.cos( direction ) * distance;
}
}
}
版权声明
本文为[dawnsun001]所创,转载请带上原文链接,感谢
https://blog.csdn.net/dawnsun2013/article/details/17718539
边栏推荐
猜你喜欢

Addition, deletion, modification and query of MySQL table
![[leetcode 202] happy number](/img/b2/a4e65688aef3a0cec8088bcaba048f.jpg)
[leetcode 202] happy number

Understanding and installing MySQL

Advanced operation of idea debug

Basic knowledge of network in cloud computing
20 excellent plug-ins recommended by idea
Solution to the trial of ycu Blue Bridge Cup programming competition in 2021

小区房价可视化
MySQL table constraints and table design

P1586 solution to tetragonal theorem
随机推荐
[leetcode 350] intersection of two arrays II
Export the articles written in CSDN to PDF format
Doomsday (simple computational geometry)
Rust 中的 Rc智能指针
Consistent hash algorithm used for redis cache load balancing
Plane semi intersecting plate
电机与拖动(戚金清版)学习整理
Rust 中的指针:Box、Rc、Cell、RefCell
Cf1427c the hard work of paparazzi
Conversion between JS object and string
[leetcode 150] evaluation of inverse Polish expression
ThreadLocal. Threadlocalmap analysis
H. Are You Safe? Convex hull naked problem
Import of data
Detection technology and principle
安全授信
Addition, deletion, query and modification of data
程序設計訓練
SQL optimization best practices
Record the installation and configuration of gestermer on TX2, and then use GST RTSP server