当前位置:网站首页>H. Are You Safe? Convex hull naked problem
H. Are You Safe? Convex hull naked problem
2022-04-23 06:22:00 【Bzdhxs_ nt】
Ideas
Find convex hull
Whether the judgment point is in the convex hull
Note the order of the output convex hull Graham The algorithm will be more convenient
#include<iostream>
#include<cstdio>
#include<cmath>
#include<algorithm>
#include<cstring>
#include<string>
#include<vector>
#include<map>
#include<queue>
#include<set>
using namespace std;
template <typename T>
inline void read(T &s){
s = 0;T w = 1, ch = getchar();while (!isdigit(ch)) {
if (ch == '-') w = -1; ch = getchar(); }while (isdigit(ch)) {
s = (s << 1) + (s << 3) + (ch ^48); ch = getchar();} s *= w;}
template <typename T>
inline void write(T s){
if (s < 0) putchar('-'), s = -s;if (s > 9) write(s / 10);putchar(s % 10 + '0');}
#define int long long
#define endl "\n"
#define _orz ios::sync_with_stdio(false),cin.tie(0)
#define mem(str,num) memset(str,num,sizeof(str))
#define forr(i,a,b) for(int i = a; i <= b;i++)
#define forn(i,n) for(int i = 0; i < n; i++)
#define dbug() cout <<"0k!"<< endl;
#define lg __lg
typedef long long ll;
int pri[16] = {
2, 3, 5, 7, 11, 13, 17, 19, 23, 29, 31, 37, 41, 43, 47, 53};
const int inf = 0x3f3f3f3f;
const int INF = ~0ULL;
const int N = 1e6+10;
const double eps = 1e-8;
const double Dinf = 1e18;
const double pi = acos(-1.0);
// Judge positive and negative
int sgn(double x){
if(fabs(x) < eps) return 0;
if(x > 0) return 1; // Positive numbers
return -1;
}
// double Compare the size
int dcmp(double x, double y){
if(fabs(x - y) < eps)
return 0;
if(x > y)
return 1;
return -1;
}
// Point class
struct Point{
double x,y;
Point(double x = 0,double y = 0):x(x),y(y){
} // Constructors
bool operator < (const Point&B)const{
return x < B.x || x == B.x && y < B.y;}
};
typedef Point Vector;
// After the vector translation, it's still the same vector , So you just need the origin and the end of the vector
//! vector + vector = vector , spot + vector = vector
// Overloading vector operators + - * / < ==
Vector operator + (Vector A , Vector B) {
return Vector{
A.x+B.x,A.y+B.y};}
Vector operator - (Point A , Point B) {
return Vector{
A.x-B.x,A.y-B.y};}
Vector operator * (Point A , double p) {
return Vector{
A.x*p,A.y*p};} // Number multiplication
Vector operator / (Point A , double p) {
return Vector{
A.x/p,A.y/p};}
//! spot / Vector comparison function
// It can be used to find the bottom left point
// bool operator < (Point &A,Point&B){return A.x < B.x || A.x == B.x && A.y < B.y;}
bool operator == (const Point &a ,const Point& b) {
return !sgn(a.x-b.x) && !sgn(a.y-b.y);}
// Return radian system
double Polar_angle(Vector A){
return atan2(A.y,A.x);}
// Dot product The relationship between the included angle and the dot product
double Dot(Vector A,Vector B){
return A.x*B.x+A.y*B.y;}
// Cross product
double Cross(Vector A,Vector B){
return A.x*B.y-A.y*B.x;}
// spot c Is it in a vector ab Left side
bool ToLeftTest(Point a,Point b,Point c){
return Cross(b-a,c-a) >= 0;}
double Length(Vector A) {
return sqrt(Dot(A,A));}
double Angle(Vector A,Vector B) {
return acos(Dot(A,B)/Length(A)/Length(B));}
//! Three points determine two vectors ,( Intersection point for A Two vectors of AB and AC) Then find the cross product of these two vectors ( Cross riding )
double Area2(Point A,Point B,Point C){
return Cross(B-A,C-A);}
// The vector after the vector rotates counterclockwise
Vector Rotate(Vector A,double rad){
return Vector(A.x*cos(rad)-A.y*sin(rad),A.x*sin(rad)+A.y*cos(rad));}
int c,p;
Point pt[55];
Point ask[55];
int stk[1005];
int top;
int cnt = 0;
bool cmp(Point a,Point b){
double t = Cross(a-pt[1],b-pt[1]);
if(sgn(t) > 0) return true;
if(sgn(t) == 0 && dcmp(Length(a-pt[1]),Length(b-pt[1])) < 0) return true;
return false;
}
void Graham(){
top = 0;
sort(pt+1,pt+1+c);
sort(pt+2,pt+1+c,cmp);
stk[++top] = 1,stk[++top] = 2;
forr(i,3,c){
while(top >=2 && sgn(Cross(pt[stk[top]]-pt[stk[top-1]],pt[i] - pt[stk[top-1]])) <= 0) top--; // < Collinear join convex hull
stk[++top] = i;
}
stk[++top] = 1;
}
bool check(int i){
forr(j,1,top-1){
Vector t = pt[stk[j+1]] - pt[stk[j]];
Vector w = ask[i] - pt[stk[j]];
if(sgn(Cross(t,w)) < 0) return true;
}
return false;
}
void print(){
forr(i,1,top) cout << pt[stk[i]].x <<" "<< pt[stk[i]].y << endl;
}
void solve(){
cin>>c>>p;
forr(i,1,c) cin>>pt[i].x >> pt[i].y;
forr(i,1,p) cin >> ask[i].x >> ask[i].y;
Graham();
printf("Case %d\n",++cnt);
print();
forr(i,1,p){
if (check(i)) printf("%.0f %.0f is safe!\n",ask[i].x,ask[i].y);
else printf("%.0f %.0f is unsafe!\n",ask[i].x,ask[i].y);
}
cout << endl;
}
signed main()
{
int t;cin>>t;
while(t--) solve();
return 0;
}
版权声明
本文为[Bzdhxs_ nt]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204210617218971.html
边栏推荐
- Font shape `OMX/cmex/m/n‘ in size <10.53937> not available (Font) size <10.95> substituted.
- Optional best practices
- List segmentation best practices
- 線性代數第二章-矩陣及其運算
- Collections multiple parameter sorting
- POI and easyexcel exercises
- Problems and solutions of database migration
- 1. Calculate a + B
- Installation and usage skills of idea
- 线性代数第三章-矩阵的初等变换与线性方程组
猜你喜欢
Linear algebra Chapter 2 - matrices and their operations

Pyqt5 learning (I): Layout Management + signal and slot association + menu bar and toolbar + packaging resource package
Best practices for MySQL storage time

深度学习基础——简单了解meta learning(来自李宏毅课程笔记)

Chapter 4 of line generation - linear correlation of vector systems
Programming record - picture rotation function SciPy ndimage. Simple use and effect observation of rotate()

Fundamentals of digital image processing (Gonzalez) II: gray transformation and spatial filtering
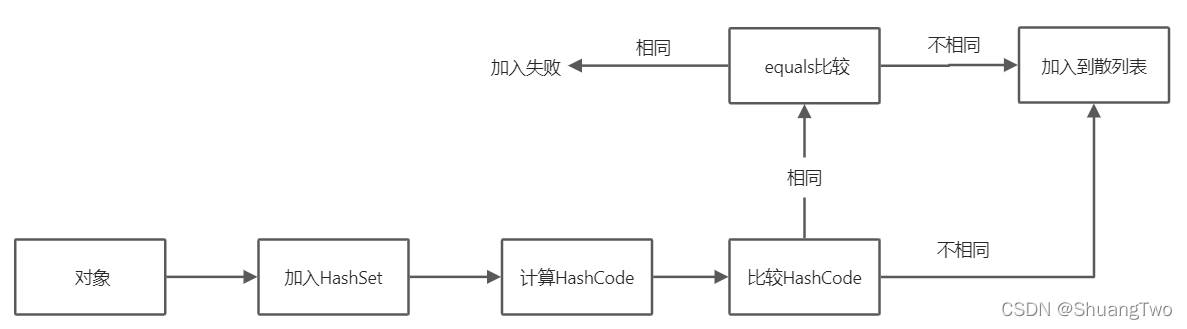
Illustrate the significance of hashcode

Understanding and installing MySQL

Kalman filter and inertial integrated navigation

随机推荐
MySQL best practices for creating tables
Unsupervised denoising - [tmi2022] ISCL: dependent self cooperative learning for unpaired image denoising
Paper on Image Restoration - [red net, nips16] image restoration using very deep revolutionary encoder decoder networks wi
Supply chain service terms
无监督去噪——[TMI2022]ISCL: Interdependent Self-Cooperative Learning for Unpaired Image Denoising
8. Integer Decomposition
PHP processing JSON_ Decode() parses JSON stringify
PyTorch笔记——实现线性回归完整代码&手动或自动计算梯度代码对比
去噪论文——[Noise2Void,CVPR19]Noise2Void-Learning Denoising from Single Noisy Images
20 excellent plug-ins recommended by idea
Fundamentals of in-depth learning -- a simple understanding of meta learning (from Li Hongyi's course notes)
Development environment EAS login license modification
ThreadLocal. Threadlocalmap analysis
Preparedstatement prevents SQL injection
治疗TensorFlow后遗症——简单例子记录torch.utils.data.dataset.Dataset重写时的图片维度问题
Installation and usage skills of idea
PyTorch笔记——通过搭建ResNet熟悉网络搭建方式(完整代码)
Linear algebra Chapter 2 - matrices and their operations
JDBC tool class encapsulation
Best practices for MySQL storage time