当前位置:网站首页>PyTorch入门:(五)模型的搭建
PyTorch入门:(五)模型的搭建
2022-08-08 18:59:00 【Here_SDUT】
前言:本文为学习 PyTorch深度学习快速入门教程(绝对通俗易懂!)【小土堆】时记录的 Jupyter 笔记,部分截图来自视频中的课件。
神经网络的骨架 nn.Module
import torch.nn as nn
import torch
class Model(nn.Module):
def __init__(self):
super().__init__()
def forward(self,input):
output = input + 1
return output
model = Model()
x = torch.tensor(1.0)
model(x)tensor(2.)上面演示了神经网络的创建和使用,可以发现直接使用 "对象名()" 的方式就能调用这个网络,具体原理应该是通过继承的Module中的 __call__ 实现的。
卷积操作
在torch.nn.functional 和 torch.nn 中都有与卷积相关的类,两者差别不大,命名为conv1d、conv2d、conv3d,分别表示对不同维度的数据进行卷积操作,以torch.nn.functional.conv2d为例:
卷积操作举例如下:
下面用代码模拟一下上图的卷积操作:
import torch
import torch.nn.functional as F
x = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]])
kernal = torch.tensor([[1,2,1],
[0,1,0],
[2,1,0]])
x = torch.reshape(x,[1,1,5,5])
kernal = torch.reshape(kernal,[1,1,3,3])
out = F.conv2d(x, kernal, stride=1)
outtensor([[[[10, 12, 12],
[18, 16, 16],
[13, 9, 3]]]])神经网络中的卷积层
具体每个参数的作用,这里有个可视化的介绍:https://github.com/vdumoulin/conv_arithmetic/blob/master/README.md
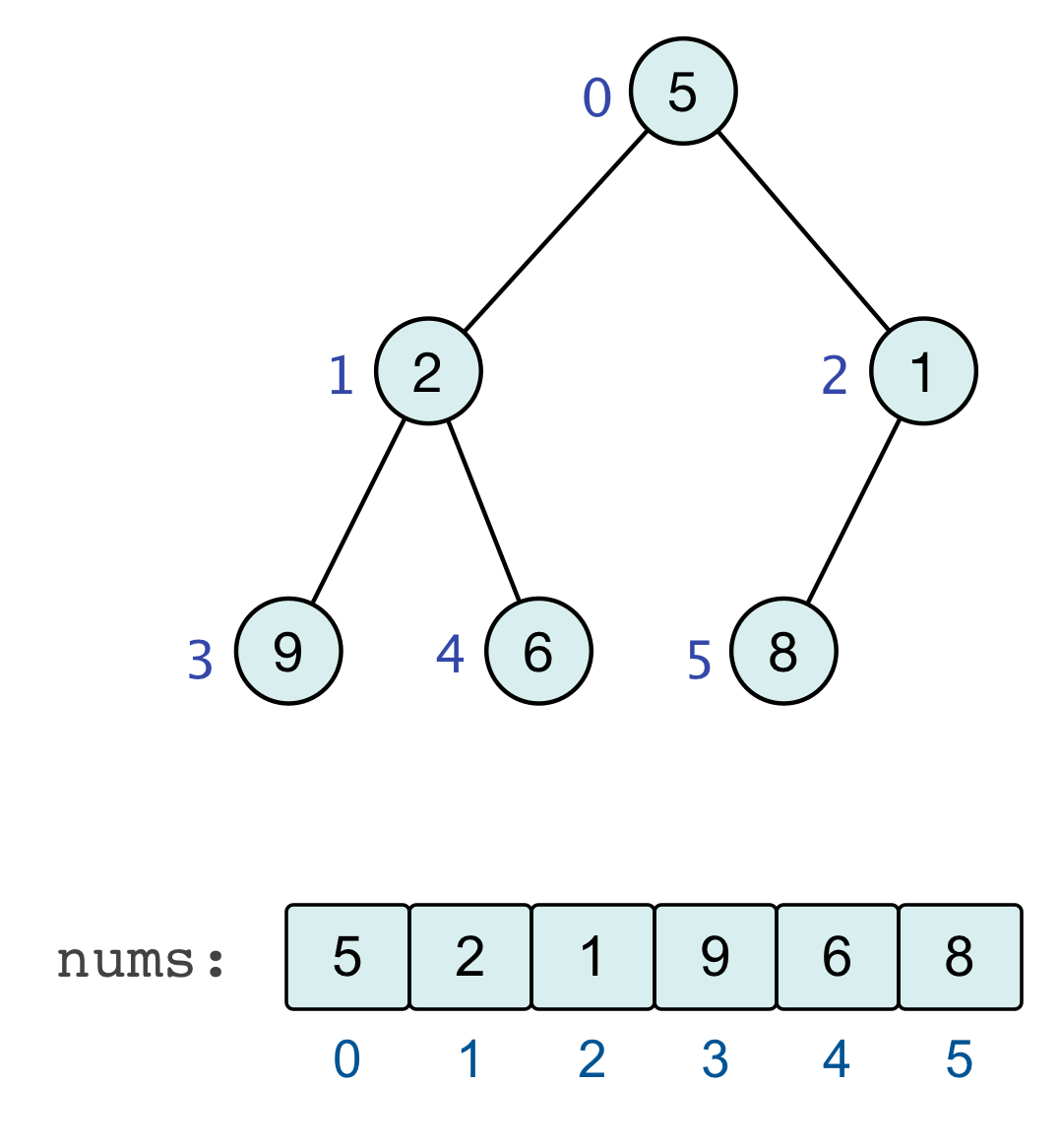
池化操作
from torch.nn import MaxPool2d
x2 = torch.tensor([[1,2,0,3,1],
[0,1,2,3,1],
[1,2,1,0,0],
[5,2,3,1,1],
[2,1,0,1,1]],dtype = torch.float32) # 池化操作需要浮点数
x2 = torch.reshape(x2,[-1,1,5,5])
class Model2(nn.Module):
def __init__(self):
super().__init__()
self.maxpool1 = MaxPool2d(kernel_size=3, ceil_mode=True)
def forward(self,input):
output =self.maxpool1(input)
return output
test = Model2()
out = test(x2)
outC:\Users\86176\anaconda3\envs\pytorch-gpu\lib\site-packages\torch\nn\functional.py:780: UserWarning: Note that order of the arguments: ceil_mode and return_indices will changeto match the args list in nn.MaxPool2d in a future release.
warnings.warn("Note that order of the arguments: ceil_mode and return_indices will change"tensor([[[[2., 3.],
[5., 1.]]]])可以看到和图片中的结果相同,那么最大池化有什么作用呢?
保留输入的特征同时减小数据量(数据降维),使得训练更快。
在tensorboard输出池化后的图形,可以发现,有一种类似马赛克的效果。
非线性激活
常用的非线性激活函数有 ReLu Sigmoid等,用于给神经网络增加非线性,使得网络有更好的表达能力。
线性变换
用于将数据从一个维度通过线性变换成另外一个维度,类似ANN中的前向传播
损失函数与反向传播
损失函数用于计算输出和目标之间的差距,为神经网络的参数更新提供一定的依据(反向传播)
可以在这里看PyTorch支持的损失函数:
https://pytorch.org/docs/stable/nn.html#loss-functions
在损失函数中需要重点关注的就是输入输出数据要求的维度大小。
import torch
from torch.nn import L1Loss, MSELoss, CrossEntropyLoss
inputs = torch.tensor([1,2,3], dtype=torch.float32)
outputs = torch.tensor([1,2,5], dtype = torch.float32)
inputs = torch.reshape(inputs, (1,1,1,3))
outputs = torch.reshape(outputs, (1,1,1,3))
loss = L1Loss(reduction='sum')
loss2 = MSELoss()
loss3 = CrossEntropyLoss()
result = loss(inputs, outputs)
result2 = loss2(inputs, outputs)
result3 = loss3(inputs, outputs)
print("loss1 = %lf loss2 = %lf loss3 = %lf" %(result, result2, result3))loss1 = 2.000000 loss2 = 1.333333 loss3 = -0.000000下面根据上述介绍的函数建立一个神经网络模型,以下图模型为例(CIFAR10-quick model):
# 在网络中应用
import torchvision
from torch.utils.data import DataLoader
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear, Module
dataset = torchvision.datasets.CIFAR10("./dataset_CIFAR10/", train = False, transform=torchvision.transforms.ToTensor(),download=False)
dataloader = DataLoader(dataset, batch_size=1)
class Model(Module):
def __init__(self):
super(Model, self).__init__()
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32,64,5,padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024,64),
Linear(64,10)
)
def forward(self, x):
x = self.model(x)
return x
# 查看第一批数据的输出结果
iterator = iter(dataloader)
model = Model()
imgs, targets = iterator.next()
imgs.requires_grad = True
outputs = model(imgs)
result_loss = loss3(outputs, targets)
print("outputs = ", outputs)
print("label = %d" %targets.item())
print("loss = %lf" %result_loss.item())
result_loss.backward()
# 反向传播后得到输入数据imgs某一维度的梯度:
print(imgs.grad[0][0][0])outputs = tensor([[ 0.0962, -0.1525, 0.0624, -0.0246, -0.1077, 0.0627, 0.0115, -0.0504,
0.0796, -0.0587]], grad_fn=<AddmmBackward0>)
label = 3
loss = 2.322197
tensor([-9.1752e-05, 1.9347e-04, -3.4172e-04, 6.5890e-04, -2.8083e-04,
-3.6005e-04, 7.4641e-05, 2.9763e-04, -6.5787e-04, -8.7575e-05,
6.1196e-04, 2.6139e-04, -1.9589e-04, 8.2434e-04, -3.5418e-04,
1.8183e-05, 1.3080e-03, -1.7294e-04, 4.4629e-04, -1.2231e-04,
-1.6606e-04, 7.2360e-05, 3.0993e-04, -9.2893e-04, 6.6193e-05,
-1.6203e-04, -2.1413e-05, 1.7245e-04, 8.3499e-05, 1.4657e-04,
-9.5108e-06, 4.2742e-04])优化器
上面得到了损失函数,并用损失函数进行梯度下降得到了每个参数对应的梯度,下一步就是使用优化器对神经网络的参数进行更新了。
pytorch支持的优化器可以在:https://pytorch.org/docs/stable/optim.html 中查看。
model2 = Model()
optim = torch.optim.Adam(model2.parameters(), lr=0.005) # 设置模型中需要更新的参数和学习率
imgs.requires_grad = False
for epoch in range(4):
running_loss = 0.0
for data in dataloader:
imgs, targets = data
outputs = model2(imgs)
result_loss = loss3(outputs, targets)
optim.zero_grad()
result_loss.backward()
optim.step()
running_loss = running_loss + result_loss
print("epoch%d loss = %lf" %(epoch, running_loss))epoch0 loss = 337001.468750
epoch1 loss = 2112099.500000
epoch2 loss = 3675678.000000
epoch3 loss = 715378.125000注:可以发现loss下降一段后又逐渐增大了,这可能是学习率过高的原因。
现有模型的使用
pytorch中也提供了一些已经训练好的模型可以使用并且修改,以VGG16模型为例做分类问题,模型结构如下:
在pytorch中,使用方法如下:
import torchvision
# vgg16在ImageNet中训练完成,但是由于ImageNet数据集过大(100多G),所以不下载使用
vgg16_false = torchvision.models.vgg16(pretrained=False) # 未进行训练,只有网络结构
vgg16_true = torchvision.models.vgg16(pretrained=True) # 训练好的模型,包括参数和结构,会在网络上下载网络参数
print(vgg16_true)VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)从上面的vgg16的参数中可以看到,它输出的维度out_features = 1000,所以它可以进行1000分类的任务,如果我们想将这个模型用在CIFAR10中,有两种途径:
- 把 out_features 改成10
- 在输出层下再加入一层,使得输出变成10
from torch import nn
dataset = torchvision.datasets.CIFAR10("./dataset_CIFAR10/", train = False, transform=torchvision.transforms.ToTensor(),download=False)
# 增加一层使得输出变为10
vgg16_true.classifier.add_module("add_linear", nn.Linear(1000,10))
vgg16_true
# 修改最后一层的输出
vgg16_false.classifier[6] = nn.Linear(4096,10)
vgg16_falseVGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
(add_linear): Linear(in_features=1000, out_features=10, bias=True)
)
)VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=10, bias=True)
)
)网络模型的保存和读取
# 保存方法1
vgg16 = torchvision.models.vgg16(pretrained=False)
torch.save(vgg16, "vgg16_method_false.pth")
# 加载模型方法1
model_load = torch.load("vgg16_method_false.pth")
# 保持方法2--模型参数(官方推荐,空间小)
torch.save(vgg16.state_dict(), "vgg16_mothod_dict.pth")
# 加载模型方式2
model_load_dict = torch.load("vgg16_mothod_dict.pth") # 导入字典参数
vgg16_load_dict = torchvision.models.vgg16(pretrained=False) # 新建模型结构
vgg16_load_dict.load_state_dict(model_load_dict) # 从字典中导入参数<All keys matched successfully>边栏推荐
- run fscript with lua
- Implementing Forward+ in Unity URP
- nyoj685 查找字符串(map)
- 几何g6将搭载harmonyos系统,产品竞争力全面升级
- Will ODPS spark on Dataworks process data more efficiently than directly using ODPS SQL?
- 为啥程序员下班后只关显示器从不关电脑?看看各大网站的答案~
- 文档管理系统对于企业来说有哪些作用?
- 最长子串(长沙理工大学第十一届程序设计竞赛 离线 做了n天.....崩溃了)
- 软件测试基础笔记
- Fortinet全新云原生保护产品上线亚马逊云科技平台
猜你喜欢






随机推荐
BP神经网络
Fortinet new cloud native protection products launched amazon cloud platform of science and technology
hdu2647 N!Again
浅谈C语言简单实现二分查找
期货开户哪家公司好,要正规安全的
第4讲:SQL语句之DDL类型的数据库定义语言
Laravel 5.8笔记
Redis之SDS数据结构
Transsion Holdings: At present, there is no clear plan for the company's mobile phone products to enter the Chinese market
ABAP 报表中如何给报表的输入参数增添 F4 Value Help 试读版
Will ODPS spark on Dataworks process data more efficiently than directly using ODPS SQL?
十六、一起学习Lua 文件 I/O
n个数取出r个数排列
Laravel queue consumption instance and timed task add task consumption
nyoj685 查找字符串(map)
hdu2647 N!Again
Flush can buy stock?Is it safe to buy stocks?
synApps -- Autosave
oracle视图v$active_session_history,dba_hist_active_session_history如何记录IP地址
Oracle存储修改以前的历史记录,怎么查找?