当前位置:网站首页>[point cloud series] Introduction to scene recognition
[point cloud series] Introduction to scene recognition
2022-04-23 13:17:00 【^_^ Min Fei】
List of articles
Finally, I can simply write the guide to this piece , It's been delayed for more than a week . I hope I can help you ;)
1. Background knowledge
Point cloud retrieval (point cloud retrieval) vs Scene recognition (place recognition)
Point cloud retrieval , It's actually very intuitive , It's like Image retrieval is the same , Map search , It's just a little cloud search . With the data from 1D–>2D–>3D The development of , Such a retrieval system is naturally needed .

Scene recognition You can view it as Point cloud retrieval An example of , Or an application scenario .
Scene recognition is mainly aimed at automatic driving , It can identify whether the current scene is in the planned route and judge .
2. Definition
Suppose the database set is M, The point cloud queue is Q, Our goal is to retrieve the point cloud queue Q Each of these point clouds is in the data set M The one with the most similar structure . The design task is a little :
- How to express a pair of point clouds ?
- How to measure similarity ?
3. traditional method
Step 3: datum line :
- feature extraction
- Feature code
- matching

Refer to the process for details :
An evaluation of feature encoding techniques for non-rigid and rigid 3D point cloud retrieval
Other relevant references :
- A survey of content based 3d shape retrieval methods 2004
- local descriptors: A comprehensive performance evaluation of 3d local feature descriptors( Traditional local feature descriptors )
- mesh retrieval:Feature encoding of spectral signatures for 3d non-rigid shape retrieval
- The bag of words approach for retrieval and categorization of 3d objects
- 3D point cloud retrieval with bidirectional feature match IEEE Access 2019 ( matching )
- 3D point cloud retrieval with bidirectional feature match ( matching )
4. Methods based on deep learning
Existing history :
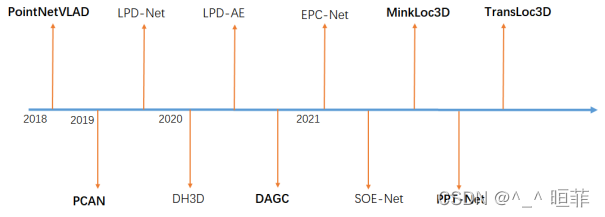
Introduction to individual methods :
- PointNetVLAD: Pioneer work , Mainly combined with PointNet+NetVLAD+ Quad user function
- PCAN: Use PointNet++ The idea of grouping to improve feature expression ;
- LPD-Net: Features use learning based methods + Hand designed , At the same time, the graph structure is used to improve the effect , High cost
- DH3D: Use 6 freedom , Focus more on SLAM Direction , So there is no specific reading
- LPD-AE: yes LPD-Net Subsequent versions , Use AE, among Encoder For feature extraction ,Decoder For refactoring , Two tasks are realized at the same time : The extracted features are used to retrieve ; Refactoring is used to reproduce features to point clouds ;
- DAGC: Mainly used DGCNN Graph convolution of , And two way attention.
- EPC-Net: Not yet .Efficient 3D Point Cloud Feature Learning for Large-Scale Place Recognition
- SOE-Net: Yes PointShift The thought of that article has directional characteristics .
- MinkLoc3D: Minkovs base point cloud convolution is used to simplify feature expression , At the same time Geo Mean Pool method replaces NetVLAD, Is the most effective method at present
- PPT-Net: Pyramid architecture + The graph structure , The best effect
- TransLoc3D: And PPT-Net Similar thinking , Yes Transformer Thought ,arXiv The latest article .
The follow-up that has not been explained in detail is slowly increasing .
5. Other reference :
- Related meetings : 3D oject retrieva (3DOR)
- Track:14 years of Retrieval Contest (SHREC) track
- Relevant latest list :https://github.com/kxhit/awesome-point-cloud-place-recognition
版权声明
本文为[^_^ Min Fei]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230611136981.html
边栏推荐
- MySQL basic statement query
- Design of body fat detection system based on 51 single chip microcomputer (51 + OLED + hx711 + US100)
- AUTOSAR from introduction to mastery 100 lectures (83) - bootloader self refresh
- AUTOSAR from introduction to mastery 100 lectures (87) - key weapon of advanced EEA - AUTOSAR and DDS
- SHA512 / 384 principle and C language implementation (with source code)
- decast id.var measure.var数据拆分与合并
- CSDN College Club "famous teacher college trip" -- Hunan Normal University Station
- Wu Enda's programming assignment - logistic regression with a neural network mindset
- X509 parsing
- [dynamic programming] 221 Largest Square
猜你喜欢

How do ordinary college students get offers from big factories? Ao Bing teaches you one move to win!

MySQL 8.0.11 download, install and connect tutorials using visualization tools

Solve the problem of Oracle Chinese garbled code

初鉴canvas,展示个小小的小案例

FatFs FAT32 learning notes
MySQL 8.0.11下载、安装和使用可视化工具连接教程

melt reshape decast 长数据短数据 长短转化 数据清洗 行列转化

9419页最新一线互联网Android面试题解析大全

100 lectures on practical application cases of Excel (VIII) - report connection function of Excel

X509 parsing
随机推荐
vscode小技巧
Data warehouse - what is OLAP
How to convert opencv pictures to bytes
51 single chip microcomputer stepping motor control system based on LabVIEW upper computer (upper computer code + lower computer source code + ad schematic + 51 complete development environment)
POM of SSM integration xml
Use Proteus to simulate STM32 ultrasonic srf04 ranging! Code+Proteus
Conflict between Mui picker and drop-down refresh
7_Addmodule和基因加和法add 得到的细胞类型打分在空间上空转对比
Translation of multi modal visual tracking: review and empirical comparison
数据仓库—什么是OLAP
Is Hongmeng system plagiarism? Or the future? Professional explanation that can be understood after listening in 3 minutes
Metalama简介4.使用Fabric操作项目或命名空间
These vscode extensions are my favorite
The difference between string and character array in C language
Proteus 8.10 installation problem (personal test is stable and does not flash back!)
According to the salary statistics of programmers in June 2021, the average salary is 15052 yuan. Are you holding back?
叮~ 你的奖学金已到账!C认证企业奖学金名单出炉
Request和Response及其ServletContext总结
XML
【行走的笔记】