当前位置:网站首页>MATLAB小技巧(6)七种滤波方法比较
MATLAB小技巧(6)七种滤波方法比较
2022-04-23 18:05:00 【mozun2020】
MATLAB小技巧(6)七种滤波方法比较
前言
MATLAB进行图像处理相关的学习是非常友好的,可以从零开始,对基础的图像处理都已经有了封装好的许多可直接调用的函数,这个系列文章的话主要就是介绍一些大家在MATLAB中常用一些概念函数进行例程演示!
七种滤波方法分别为巴特沃斯低通滤波、FIR低通滤波、移动平均滤波、中值滤波、维纳滤波、自适应滤波、小波滤波。不同的滤波处理方式,对各种的噪声会有不同的侧重点,处理效果也各有不同。在本实验中自适应滤波方式得到的滤波效果较好。
一. MATLAB仿真
%****************************************************************************************
%
% 创建两个信号Mix_Signal_1 和信号 Mix_Signal_2
%
%***************************************************************************************
clc;clear;close;
Fs = 1000; %采样率
N = 1000; %采样点数
n = 0:N-1;
t = 0:1/Fs:1-1/Fs; %时间序列
Signal_Original_1 =sin(2*pi*10*t)+sin(2*pi*20*t)+sin(2*pi*30*t);
Noise_White_1 = [0.3*randn(1,500), rand(1,500)]; %前500点高斯分部白噪声,后500点均匀分布白噪声
Mix_Signal_1 = Signal_Original_1 + Noise_White_1; %构造的混合信号
Signal_Original_2 = [zeros(1,100), 20*ones(1,20), -2*ones(1,30), 5*ones(1,80), -5*ones(1,30), 9*ones(1,140), -4*ones(1,40), 3*ones(1,220), 12*ones(1,100), 5*ones(1,20), 25*ones(1,30), 7 *ones(1,190)];
Noise_White_2 = 0.5*randn(1,1000); %高斯白噪声
Mix_Signal_2 = Signal_Original_2 + Noise_White_2; %构造的混合信号
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作巴特沃斯低通滤波。
%
%***************************************************************************************
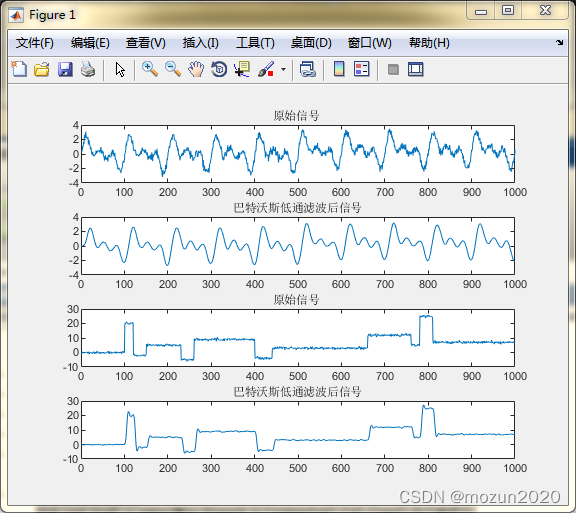
%混合信号 Mix_Signal_1 巴特沃斯低通滤波
figure(1);
Wc=2*50/Fs; %截止频率 50Hz
[b,a]=butter(4,Wc);
Signal_Filter=filter(b,a,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-4,4]);
title('巴特沃斯低通滤波后信号');
%混合信号 Mix_Signal_2 巴特沃斯低通滤波
Wc=2*100/Fs; %截止频率 100Hz
[b,a]=butter(4,Wc);
Signal_Filter=filter(b,a,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('巴特沃斯低通滤波后信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作FIR低通滤波。
%
%***************************************************************************************
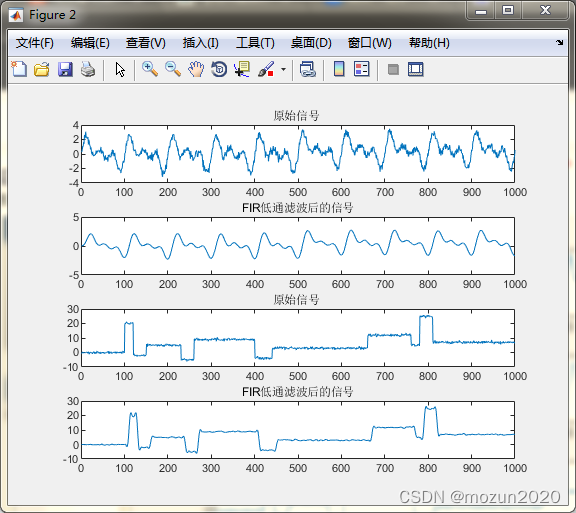
%混合信号 Mix_Signal_1 FIR低通滤波
figure(2);
F = [0:0.05:0.95];
A = [1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ;
b = firls(20,F,A);
Signal_Filter = filter(b,1,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 FIR低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('FIR低通滤波后的信号');
%混合信号 Mix_Signal_2 FIR低通滤波
F = [0:0.05:0.95];
A = [1 1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ;
b = firls(20,F,A);
Signal_Filter = filter(b,1,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 FIR低通滤波滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('FIR低通滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作移动平均滤波
%
%***************************************************************************************
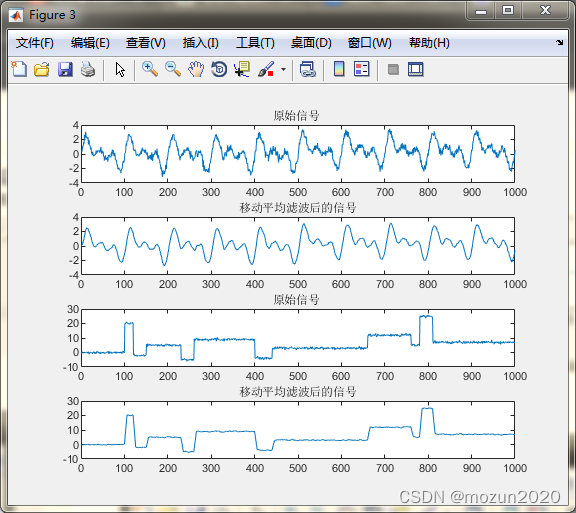
%混合信号 Mix_Signal_1 移动平均滤波
figure(3);
b = [1 1 1 1 1 1]/6;
Signal_Filter = filter(b,1,Mix_Signal_1);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-4,4]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 移动平均滤波后信号
plot(Signal_Filter);
axis([0,1000,-4,4]);
title('移动平均滤波后的信号');
%混合信号 Mix_Signal_2 移动平均滤波
b = [1 1 1 1 1 1]/6;
Signal_Filter = filter(b,1,Mix_Signal_2);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 移动平均滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('移动平均滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作中值滤波
%
%***************************************************************************************
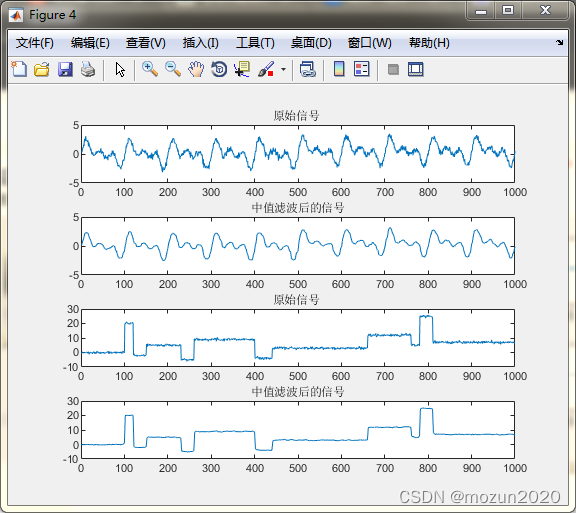
%混合信号 Mix_Signal_1 中值滤波
figure(4);
Signal_Filter=medfilt1(Mix_Signal_1,10);
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 中值滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('中值滤波后的信号');
%混合信号 Mix_Signal_2 中值滤波
Signal_Filter=medfilt1(Mix_Signal_2,10);
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 中值滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('中值滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作维纳滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 维纳滤波
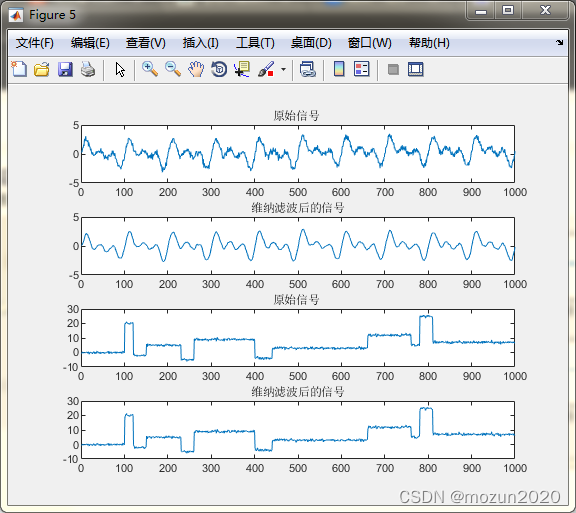
figure(5);
Rxx=xcorr(Mix_Signal_1,Mix_Signal_1); %得到混合信号的自相关函数
M=100; %维纳滤波器阶数
for i=1:M %得到混合信号的自相关矩阵
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N);
end
end
Rxy=xcorr(Mix_Signal_1,Signal_Original_1); %得到混合信号和原信号的互相关函数
for i=1:M
rxy(i)=Rxy(i+N-1);
end %得到混合信号和原信号的互相关向量
h = inv(rxx)*rxy'; %得到所要涉及的wiener滤波器系数
Signal_Filter=filter(h,1, Mix_Signal_1); %将输入信号通过维纳滤波器
subplot(4,1,1); %Mix_Signal_1 原始信号
plot(Mix_Signal_1);
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2); %Mix_Signal_1 维纳滤波后信号
plot(Signal_Filter);
axis([0,1000,-5,5]);
title('维纳滤波后的信号');
%混合信号 Mix_Signal_2 维纳滤波
Rxx=xcorr(Mix_Signal_2,Mix_Signal_2); %得到混合信号的自相关函数
M=500; %维纳滤波器阶数
for i=1:M %得到混合信号的自相关矩阵
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N);
end
end
Rxy=xcorr(Mix_Signal_2,Signal_Original_2); %得到混合信号和原信号的互相关函数
for i=1:M
rxy(i)=Rxy(i+N-1);
end %得到混合信号和原信号的互相关向量
h=inv(rxx)*rxy'; %得到所要涉及的wiener滤波器系数
Signal_Filter=filter(h,1, Mix_Signal_2); %将输入信号通过维纳滤波器
subplot(4,1,3); %Mix_Signal_2 原始信号
plot(Mix_Signal_2);
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4); %Mix_Signal_2 维纳滤波后信号
plot(Signal_Filter);
axis([0,1000,-10,30]);
title('维纳滤波后的信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作自适应滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 自适应滤波
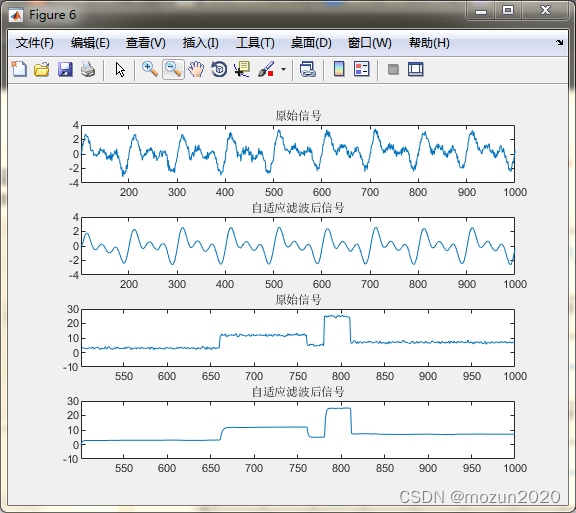
figure(6);
N=1000; %输入信号抽样点数N
k=100; %时域抽头LMS算法滤波器阶数
u=0.001; %步长因子
%设置初值
yn_1=zeros(1,N); %output signal
yn_1(1:k)=Mix_Signal_1(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=Mix_Signal_1((i-k+1):(i));
yn_1(i)=w*XN';
e(i)=Signal_Original_1(i)-yn_1(i);
w=w+2*u*e(i)*XN;
end
subplot(4,1,1);
plot(Mix_Signal_1); %Mix_Signal_1 原始信号
axis([k+1,1000,-4,4]);
title('原始信号');
subplot(4,1,2);
plot(yn_1); %Mix_Signal_1 自适应滤波后信号
axis([k+1,1000,-4,4]);
title('自适应滤波后信号');
%混合信号 Mix_Signal_2 自适应滤波
N=1000; %输入信号抽样点数N
k=500; %时域抽头LMS算法滤波器阶数
u=0.000011; %步长因子
%设置初值
yn_1=zeros(1,N); %output signal
yn_1(1:k)=Mix_Signal_2(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=Mix_Signal_2((i-k+1):(i));
yn_1(i)=w*XN';
e(i)=Signal_Original_2(i)-yn_1(i);
w=w+2*u*e(i)*XN;
end
subplot(4,1,3);
plot(Mix_Signal_2); %Mix_Signal_1 原始信号
axis([k+1,1000,-10,30]);
title('原始信号');
subplot(4,1,4);
plot(yn_1); %Mix_Signal_1 自适应滤波后信号
axis([k+1,1000,-10,30]);
title('自适应滤波后信号');
%****************************************************************************************
%
% 信号Mix_Signal_1 和 Mix_Signal_2 分别作小波滤波
%
%***************************************************************************************
%混合信号 Mix_Signal_1 小波滤波
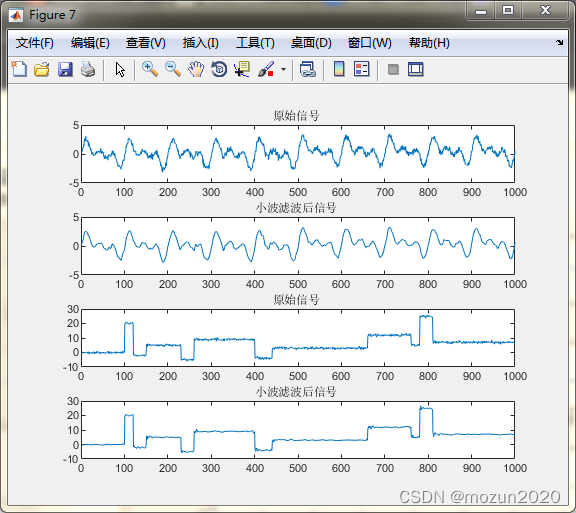
figure(7);
subplot(4,1,1);
plot(Mix_Signal_1); %Mix_Signal_1 原始信号
axis([0,1000,-5,5]);
title('原始信号 ');
subplot(4,1,2);
[xd,cxd,lxd] = wden(Mix_Signal_1,'sqtwolog','s','one',2,'db3');
plot(xd); %Mix_Signal_1 小波滤波后信号
axis([0,1000,-5,5]);
title('小波滤波后信号 ');
%混合信号 Mix_Signal_2 小波滤波
subplot(4,1,3);
plot(Mix_Signal_2); %Mix_Signal_2 原始信号
axis([0,1000,-10,30]);
title('原始信号 ');
subplot(4,1,4);
[xd,cxd,lxd] = wden(Mix_Signal_2,'sqtwolog','h','sln',3,'db3');
plot(xd); %Mix_Signal_2 小波滤波后信号
axis([0,1000,-10,30]);
title('小波滤波后信号 ');
二. 仿真结果
三. 小结
在本节的仿真中主要是处理添加噪声的样本进行滤波处理,后续会看情况,试采用真实带噪样本,例如带噪图片或者带噪语音进行滤波处理,对比各滤波方法的处理效果。每天学一个MATLAB小知识,大家一起来学习进步阿!
版权声明
本文为[mozun2020]所创,转载请带上原文链接,感谢
https://blog.csdn.net/sinat_34897952/article/details/124334993
边栏推荐
- C1 notes [task training chapter I]
- Mode of interprocess communication
- Installation du docker redis
- Cloud native Virtualization: building edge computing instances based on kubevirt
- Crack sliding verification code
- Operators in C language
- k8s之实现redis一主多从动态扩缩容
- Format problems encountered in word typesetting
- C language input and output (printf and scanf functions, putchar and getchar functions)
- Rust: shared variable in thread pool
猜你喜欢

Cloud native Virtualization: building edge computing instances based on kubevirt
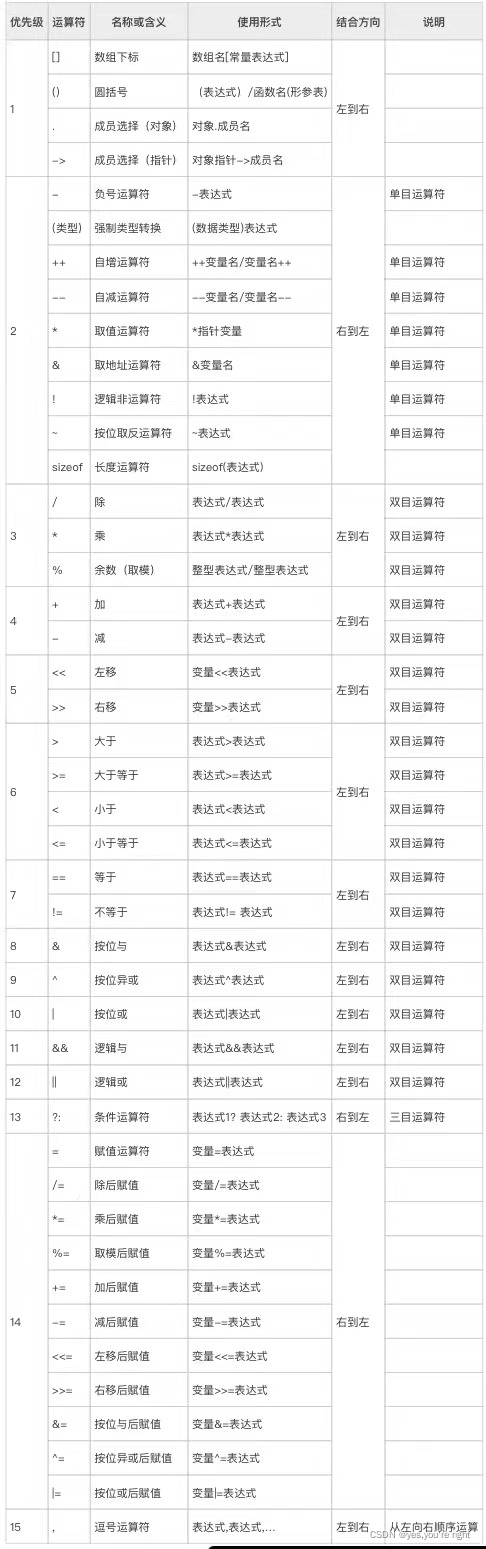
Operators in C language
SSD硬盘SATA接口和M.2接口区别(详细)总结
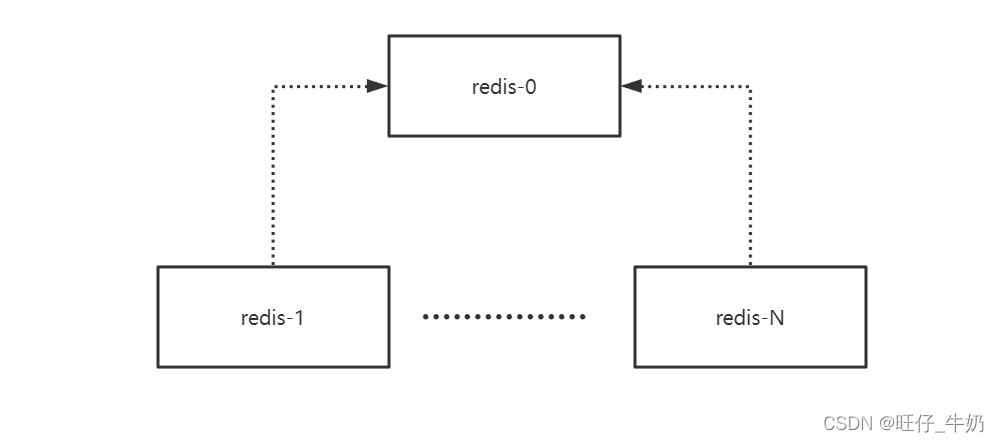
Implementation of k8s redis one master multi slave dynamic capacity expansion
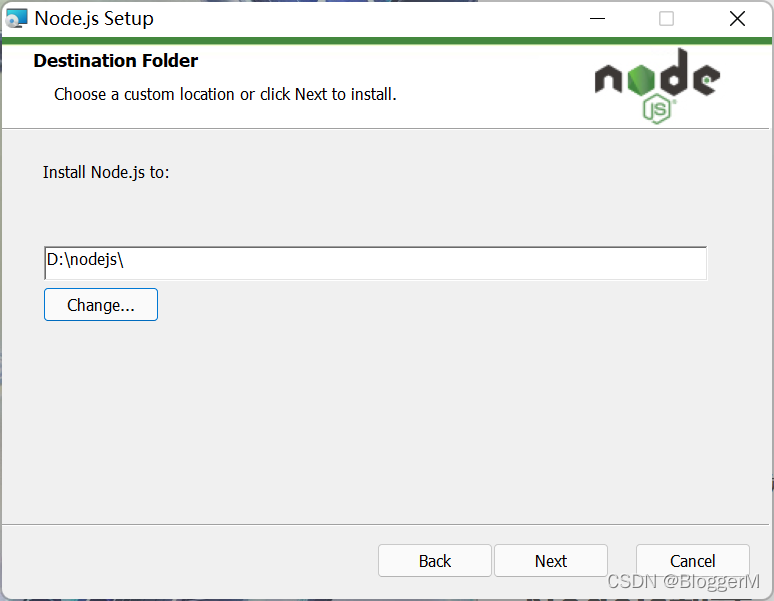
Nodejs安装
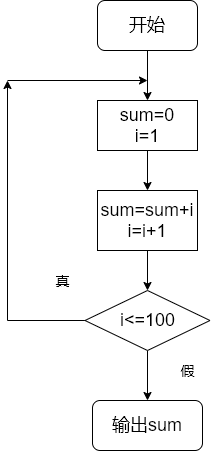
C language loop structure program

Docker 安装 MySQL
Map basemap Library
Docker installation MySQL
深度学习经典网络解析目标检测篇(一):R-CNN
随机推荐
Install pyshp Library
cv_ Solution of mismatch between bridge and opencv
Laser slam theory and practice of dark blue College Chapter 3 laser radar distortion removal exercise
SSD硬盘SATA接口和M.2接口区别(详细)总结
C# 的数据流加密与解密
Jenkspy package installation
MySQL auto start settings start with systemctl start mysqld
Docker 安裝 Redis
Secure credit
Thirteen documents in software engineering
Clion installation tutorial
[UDS unified diagnostic service] IV. typical diagnostic service (6) - input / output control unit (0x2F)
2022 Jiangxi Photovoltaic Exhibition, China Distributed Photovoltaic Exhibition, Nanchang Solar Energy Utilization Exhibition
Qt读写XML文件(含源码+注释)
Flash - Middleware
Fashion classification case based on keras
I/O多路复用及其相关详解
mysql自动启动设置用Systemctl start mysqld启动
Logic regression principle and code implementation
Nat Commun|在生物科学领域应用深度学习的当前进展和开放挑战