当前位置:网站首页>Comparison of indoor positioning methods of several intelligent robots
Comparison of indoor positioning methods of several intelligent robots
2022-04-23 08:08:00 【MocapLeader】
In recent years, with the development of control algorithm , Unmanned aerial vehicle (uav) 、 Intelligent robots such as unmanned vehicles are developing rapidly in various fields . When R & D personnel conduct relevant research on intelligent robots , It is usually necessary to complete the simulation debugging experiment in the indoor environment , In these experiments , Determine the positioning of each agent and its relative position with other agents , That is, accurate positioning , Is very important .

Indoor positioning algorithm principle
In principle, the current location algorithm , In general, it can be divided into the following three types .
One 、 Proximity information method : Using the limited range of signal action , To determine whether the point to be measured is near a reference point , This method can only provide approximate location information
Two 、 Scenario analysis : Measure the strength of the received signal , With the realization of measurement 、 Compare the signal strength of the location where the database exists .
3、 ... and 、 Geometric feature method : An algorithm for positioning based on geometric principles , Specifically, it is divided into trilateral positioning method 、 Triangular positioning method and hyperbolic positioning method .

According to the positioning algorithm introduced above , A variety of indoor positioning technologies have been derived . At present, most of the positioning technology needs the help of auxiliary nodes , The position of the node to be measured relative to the auxiliary node is calculated through different ranging methods , Then compare it with the data collected in advance in the database , To determine the current position .
The main process of indoor positioning is to set fixed auxiliary nodes in the indoor environment , The location of these nodes is known , Some location information exists directly in the node , Such as RFID (RFID) The label of , Some are stored in the database of computer terminals , Such as infrared 、 Ultrasound, etc .
Then measure the distance from the node to be tested to the auxiliary node , So as to determine the relative position , Ranging in some way usually requires a pair of transmitting and receiving equipment , According to the position of transmitter and receiver, it can be divided into two types : One is that the transmitter is located at the node under test , The receiver is located at the auxiliary node , For example, infrared , Ultrasonic and radio frequency identification (RFID); The other is that the transmitter is located at the auxiliary node , The receiver is located at the node under test , for example WiFi、 Ultra wide band (UWB)、ZigBee.
Indoor positioning technology comparison
Here are the principles, advantages and disadvantages of eight indoor positioning technologies .
One 、WiFi Location Technology , The location method is scene analysis , The positioning accuracy is different due to the coverage , You can achieve 2-50m. The advantage is easy installation 、 The overall accuracy of the system is relatively high , The disadvantage is that there is a large amount of fingerprint information collection 、 Susceptible to interference from other signals .

Two 、 Video recognition (RFID) technology , The location method is proximity information method , Its positioning accuracy is 5cm-5m Between . The advantage of this method is high accuracy 、 Low cost 、 Small size of logo , The disadvantage is the short positioning distance 、 Not easy to integrate .
3、 ... and 、ZigBee Location Technology , The location method is proximity information method , Positioning accuracy in 1-2m. The advantage is low power consumption 、 Low cost , The disadvantage is low stability 、 Disturbed by the environment .

Four 、 Infrared positioning technology , The location method is proximity information method , Positioning accuracy in 5-10m. The advantage is high positioning accuracy , The disadvantage is the high cost 、 High power consumption 、 Affected by light .
5、 ... and 、 UWB positioning (UWB), The positioning method is trilateral positioning method , Positioning accuracy in 6-10cm, The advantage is strong penetration 、 High precision 、 Low power consumption , The disadvantage is that the cost is relatively high .

6、 ... and 、 Ultrasonic positioning technology , The positioning method is trilateral positioning method , Positioning accuracy in 1-10cm. The advantage is high accuracy 、 Simple structure , The disadvantage is the multipath effect 、 Affected by ambient temperature 、 The signal attenuation is obvious .
7、 ... and 、 Inertial positioning method , It is the motion data collected by inertial sensor , Such as acceleration sensor 、 Gyroscopes, etc. measure the speed of objects 、 Direction 、 Acceleration and other information , By integral positioning method or based on dead reckoning , After calculation, the position information of the object is obtained . Its advantage is that it does not depend on the external environment , The disadvantage is that with the increase of walking time , There are accumulated errors in inertial navigation and positioning , Therefore, it is generally used for data fusion with other sensors .

8、 ... and 、NOKOV Measure indoor positioning technology , It is mainly used for real-time and accurate measurement , Record the trajectory or attitude of an object in real three-dimensional space . Its optical motion capture system uses multiple high-speed cameras , Monitor and track the marker points on the target to be captured from different angles , According to the principle of computer vision , It can be obtained from the continuous image sequence of multiple high-speed cameras , Determine the position and trajectory of a point in space , Obtain the real-time rigid body pose data through SDK Sent to UAV Ground Station , The ground station outputs control commands to further control the motion of the UAV . Considering different actual situations , The motion capture workstation can also pass the real-time rigid body pose data through SDK, Sent to the control chip of the UAV , Use UAV to solve data , Realize autonomous cooperative control .


By contrast, we can find , Among all indoor positioning technologies , Motion capture technology ranks first in accuracy , Its measurement accuracy is as high as submillimeter .NOKOV The measurement motion capture system can obtain the position of the target 、 Attitude and speed 、 Acceleration and other information , High technical maturity 、 High precision 、 High sampling frequency , It is suitable for research with high-precision positioning requirements .
NOKOV The measurement action capture data is used as the truth value for algorithm verification
For some autonomous navigation UAVs , Such as using lidar 、 Binocular camera 、 Depth camera 、 Airborne sensors such as optical flow sensor are used as the scheme of positioning and obstacle avoidance ,NOKOV The data acquired by the measurement motion capture system does not participate in flight control , Only high-precision reference standard position information is provided for analysis results .

For example, in the UAV cluster autonomous construction system developed by the school of architecture and urban planning of Tongji University , I used NOKOV Measuring motion capture systems . The whole construction system consists of UAV space pose feedback and ground station trajectory planning and control , The system positioning requirements are divided into two parts : Pose control and global positioning control . Even though NOKOV The measurement motion capture system can solve the pose of indoor rigid bodies , And the calculation accuracy is better than that of airborne inertial measurement unit , However, the built-in inertial measurement unit of the system is enough to support the attitude estimation of the rigid body , So the pose control part , It uses the solutions commonly used in the field of UAV Control , That is, using the airborne attitude sensor 、 Magnetometer 、 Barometer, airspeed meter and other sensor systems comprehensively process the real-time local attitude information of UAV . The global positioning control of the system is based on optical infrared camera NOKOV Measuring motion capture systems , Replace the commonly used outdoor GPS The positioning system tracks the real-time position of the UAV , To meet the operation requirements of stable hovering of indoor UAV , At the same time, the UAV coordinate information is transmitted back to the visual interface of the ground station computer .

This is based on NOKOV UAVs that measure motion capture systems independently build real-time control systems and visual interface platforms , The capability of UAV for discrete structure construction is verified , At the same time, the overall structure form and discrete element form of UAV masonry are put forward by using the principle of space mosaic , This series of achievements provide further research ideas and methods for the independent construction of air Cluster agents .
版权声明
本文为[MocapLeader]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230642292888.html
边栏推荐
- Chapter VII asset impairment
- 数据库之MySQL——基本常用查询命令
- 巨头押注的全屋智能,正在驱动海信、华为、小米们「自我革命」
- Three minutes to teach you to use Houdini fluid > > to solve particle fluid droplets
- PHP high precision computing
- MySQL——第一章节(MySQL中的数据类型)
- Chapter V investment real estate
- Flutter之Provider共享数据的两种方式
- Fibula dynamic programming
- 智能名片小程序名片详情页功能实现关键代码
猜你喜欢

Intranet penetration series: dnscat2 of Intranet tunnel

Thinkphp6 + JWT realizes login verification

一篇文章看懂变量提升(hoisting)

数据库之MySQL——基础篇
![[programming practice / embedded competition] learning record of embedded competition (II): picture streaming based on TCP](/img/6c/7408180d0c24560b4a68982635520e.jpg)
[programming practice / embedded competition] learning record of embedded competition (II): picture streaming based on TCP

数据库之Mysql——概述安装篇
![BUUCTF [极客大挑战 2019]EasySQL1](/img/ad/afca09bc1da003393319af700e90e3.png)
BUUCTF [极客大挑战 2019]EasySQL1

How to import Excel data in SQL server, 2019 Edition
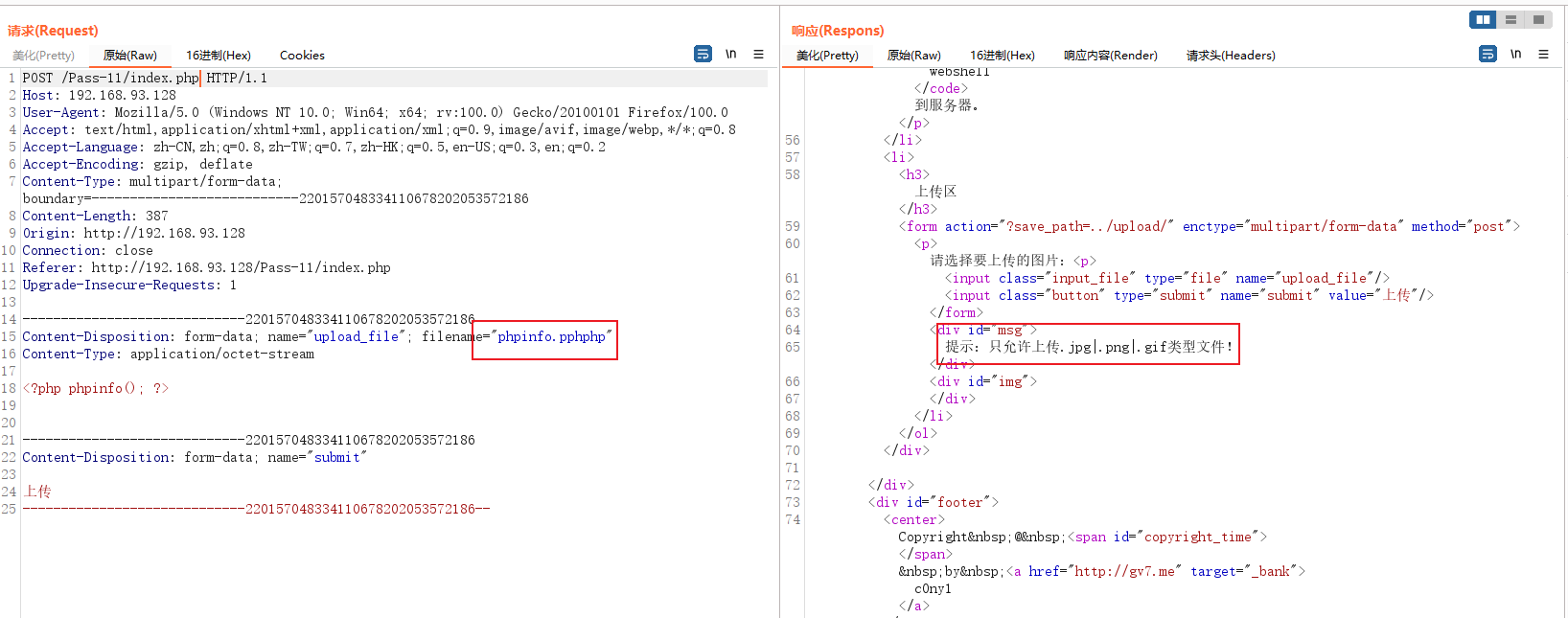
upload-labs 靶场练习

MySQL -- the secret of lock -- how to lock data
随机推荐
数据库之Mysql——概述安装篇
NLLLoss+log_SoftMax=CE_Loss
Cloud computing skills competition -- Part 2 of openstack private cloud environment
雲計算技能大賽 -- openstack私有雲環境 第一部分
在线YAML转XML工具
NIH降血脂指南《your guide to lowering your Cholesterol with TLC》笔记(持续更新中)
Alibaba sentinel学习QA
1+x云计算中级--脚本搭建读写分离
Talking about distributed storage from ES, mongodb, redis and rocketmq
智能名片小程序名片详情页功能实现关键代码
Go语学习笔记 - 异常处理 | 从零开始Go语言
Ignis公链的NFT生态发展:Unicorn.art的捐赠开发之路
Internal network security attack and defense: a practical guide to penetration testing (8): Authority maintenance analysis and defense
Ribbon启动流程
Flutter之Provider共享数据的两种方式
Essays (updated from time to time)
Interview learning route
Ribbon start process
Thinkphp6 + JWT realizes login verification
Reading notes