当前位置:网站首页>HLS / chisel practice CORDIC high performance computing complex square root
HLS / chisel practice CORDIC high performance computing complex square root
2022-04-23 02:57:00 【AlwaysDayOne】
CORDIC( Coordinate rotation digital algorithm ) It's a computational triangle 、 Numerical algorithms for hyperbolic and other mathematical functions , Each operation produces a result output . This enables us to adjust the accuracy of the algorithm according to the application requirements ; More accurate results can be obtained by increasing the number of operation iterations .CORDIC Is to use only addition 、 Subtraction 、 Shift and look-up table implementation of a simple algorithm , This algorithm is in FPGA High efficiency in , It is often used in hardware algorithm implementation .
The paper [1] This paper introduces a method through CORDIC In the algorithm, CR、CV、HV Three modes are used to split the method of high-performance calculation of complex square root , This article will use Chisel Implement the method , The default here is in the following articles CORDIC Based on the principle .
HLS / Chisel Realization CORDIC The algorithm calculates the inverse trigonometric function ( Vector mode of circular coordinate system )
HLS / Chisel Realization CORDIC Algorithmic hyperbolic system
HLS / Chisel utilize CORDIC Calculation of square root of hyperbolic system
principle
CORDIC background
CORDIC The algorithm has two modes: rotation and vector , They can be in circular coordinates 、 Linear coordinate system and hyperbolic coordinate system use , So we can work out 8 Operations , And combined with this 8 This operation can also derive many other operations . The following table shows 8 Operation in CORDIC The derivation of the core formula in the algorithm :

Next, we will use the above CV、HV Three modes realize the square root of complex numbers
The square root of a complex number
First of all, there is the following complex square root formula x + i y \sqrt{x+i y} x+iy The results are derived , First convert to polar mode r c o s θ + i r s i n θ \sqrt{rcos\theta+i rsin\theta} rcosθ+irsinθ, from De Moivre The formula of complex power can be obtained as follows :
Z n = [ r ( c o s θ + i s i n θ ] n = r n [ c o s ( n θ ) + i s i n ( n θ ) ] Z^n = [r(cos\theta+isin\theta]^n = r^n[cos(n\theta)+isin(n\theta)] Zn=[r(cosθ+isinθ]n=rn[cos(nθ)+isin(nθ)]
Then find the square root as :
Z 1 2 = r ( c o s θ 2 + s i n θ 2 ) Z^{\frac 1 2} = \sqrt r (cos{\frac \theta 2} + sin{\frac \theta 2}) Z21=r(cos2θ+sin2θ)
because :
c o s θ 2 = ± 1 + c o s θ 2 , s i n θ 2 = ± 1 − c o s θ 2 cos{\frac \theta 2} = \pm \sqrt{\frac {1+cos\theta} 2},sin{\frac \theta 2} = \pm \sqrt{\frac {1-cos\theta} 2} cos2θ=±21+cosθ,sin2θ=±21−cosθ
And
x > 0 , θ ∈ [ − π 2 , π 2 ] x>0,\theta∈[-\frac \pi 2, \frac \pi 2] x>0,θ∈[−2π,2π]
Then the polar coordinates are transformed into the original coordinate system, and the following results can be obtained :
x + i y = x 2 + y 2 + x 2 ± i x 2 + y 2 − x 2 \sqrt{x+i y}=\sqrt{\frac{\sqrt{x^{2}+y^{2}}+x}{2}} \pm i \sqrt{\frac{\sqrt{x^{2}+y^{2}}-x}{2}} x+iy=2x2+y2+x±i2x2+y2−x
CORDIC High performance computing principle of complex square root
- CV The mode is converted to polar form
Reference article HLS / Chisel Realization CORDIC The algorithm calculates the inverse trigonometric function ( Vector mode of circular coordinate system )
First enter the following values
X 0 = x , Y 0 = y , Z 0 = 0 \mathrm{X}_{0}=x, \quad Y_{0}=y, \quad Z_{0}=0 X0=x,Y0=y,Z0=0
Here, the inverse trigonometric function calculation module can get the following results :
X = K x 2 + y 2 = r , Y = 0 , Z = tan ( y / x ) − 1 X=K \sqrt{x^{2}+y^{2}} = r , \quad \mathrm{Y}=0, \quad Z=\tan (y / x)^{-1} X=Kx2+y2=r,Y=0,Z=tan(y/x)−1
among K stay CV The derivation of the model is introduced in the article , Is a fixed constant .
- HV_square_root Mode calculation
Reference article HLS / Chisel utilize CORDIC Calculation of square root of hyperbolic system
take 1 Results in r Do the following :
a r e = ( r + x ) / 2 , a i m = ( r − x ) / 2 a_{re}=(r+x)/2,a_{im}=(r-x)/2 are=(r+x)/2,aim=(r−x)/2
The input HV The value of the module is :
X 0 = a + 1 , Y 0 = a − 1 , Z 0 = 0 \mathrm{X}_{0}=a+1, \quad Y_{0}=a-1, \quad Z_{0}=0 X0=a+1,Y0=a−1,Z0=0
Specifically HV For the calculation inside the module, refer to the above cited articles and HLS / Chisel Realization CORDIC Algorithmic hyperbolic system Realization .
Use two final HV_square_root The module calculates the real part and imaginary part respectively, and the results are as follows :
X = x 2 + y 2 + x 2 Y = x 2 + y 2 − x 2 X = \sqrt{\frac{\sqrt{x^{2}+y^{2}}+x}{2}} \quad Y= \sqrt{\frac{\sqrt{x^{2}+y^{2}}-x}{2}} X=2x2+y2+xY=2x2+y2−x
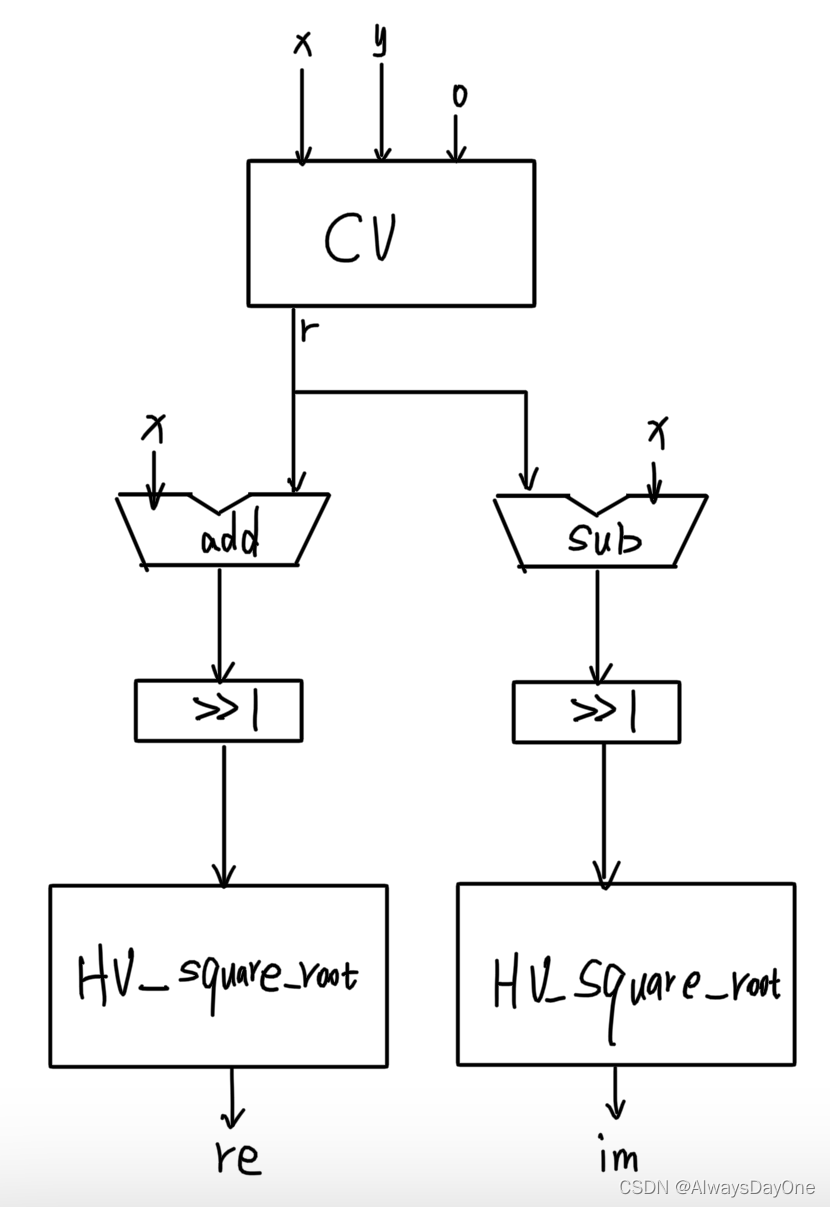
The specific process modules are as follows :
HLS practice
#define COS_SIN_TYPE float
#define NUM_ITERATIONS 50
typedef struct {
COS_SIN_TYPE re, im; } Complex;
THETA_TYPE cordic_K = 0.6072529350088814
void cordic_complex_square_root(Complex x, Complex &res)
{
COS_SIN_TYPE p,q;
p = divisor.re;
q = divisor.im;
/* CV Pattern */
for(int j = 0;j < NUM_ITERATIONS; j++){
COS_SIN_TYPE temp_cos = p;
if(y < 0){
p = p - q >> j;
q = q + temp_cos >> j;
} else{
x = x + y >> j;
q = q - temp_cos >> j;
}
}
// Set ther final sine and cosine values
r = p * cordic_K_n;
/* Intermediate treatment */
COS_SIN_TYPE x_next = (r + p) >> 1;
COS_SIN_TYPE y_next = (r - p) >> 1;
/* HV modular , Call the function implemented in the previous article */
cordic_hv_square_root(x_next , res.re);
cordic_hv_square_root(y_next , res.im);
}
CHISEL practice
Fixed point number definition
First define the number of fixed points , Pay attention to chisel.experimental There are fixed-point classes in the package
/* Cordic Global constant definition of */
trait Cordic_Const_Data extends HasDataConfig{
/* Number of iterations configuration */
val NUM_ITERATIONS = 20
}
trait HasDataConfig {
/* Bit width definition of fixed-point number */
val DataWidth = 32
val BinaryPoint = 20
}
The source code to achieve
class cordic_complex_square_root extends Module with HasDataConfig with Cordic_Const_Data {
/* * @io.op : Entered divisor A complex number represented by a fixed-point number Complex Input range R+ * @io.res : Output complex division result A complex number represented by a fixed-point number Complex Range R * details: utilize cordic Realize complex division , The period is 2* The number of iterations NUM_ITERATIONS **/
val io = IO(new Bundle {
val op: Complex = Input(new Complex())
val res: Complex = Output(new Complex())
// val debug_cv_out: FixedPoint = Output(FixedPoint(DataWidth.W, BinaryPoint.BP))
})
val x = WireInit(io.op.re)
val y = WireInit(io.op.im)
/* CV Pattern seeking square(x^2+y^2) */
/* Initializes the calculated register array , formation NUM_ITERATIONS It's a cascade of water */
val current_x: Vec[FixedPoint] = RegInit(VecInit(Seq.fill(NUM_ITERATIONS)(FixedPoint.fromDouble(0.0, DataWidth.W, BinaryPoint.BP)))) // cos
val current_y: Vec[FixedPoint] = RegInit(VecInit(Seq.fill(NUM_ITERATIONS)(FixedPoint.fromDouble(0.0, DataWidth.W, BinaryPoint.BP)))) // sin
val cordic_K: FixedPoint = FixedPoint.fromDouble(0.6072529350088814, DataWidth.W, BinaryPoint.BP)
/* Deposit the originally entered x value */
val reg_x: Vec[FixedPoint] = RegInit(VecInit(Seq.fill(NUM_ITERATIONS)(FixedPoint.fromDouble(0.0, DataWidth.W, BinaryPoint.BP)))) // cos
for (i <- 0 until NUM_ITERATIONS) {
/* * x[i] = K(x[i-1] - sigma * 2^(-i) * y[i-1]) * y[i] = K(y[i-1] + sigma * 2^(-i) * x[i-1]) **/
if (i == 0) {
reg_x(0) := x
/* The first stage of the pipeline is directly connected to (io.x,io.y) Click to do the operation */
when(y < FixedPoint.fromDouble(0.0, DataWidth.W, BinaryPoint.BP)) {
current_x(i) := x - (y >> i)
current_y(i) := y + (x >> i)
}.otherwise {
current_x(i) := x + (y >> i)
current_y(i) := y - (x >> i)
}
} else {
reg_x(i) := reg_x(i - 1)
when(current_y(i - 1) < FixedPoint.fromDouble(0.0, DataWidth.W, BinaryPoint.BP)) {
current_x(i) := current_x(i - 1) - (current_y(i - 1) >> i) // Shift instead of multiplication
current_y(i) := current_y(i - 1) + (current_x(i - 1) >> i)
}.otherwise {
current_x(i) := current_x(i - 1) + (current_y(i - 1) >> i)
current_y(i) := current_y(i - 1) - (current_x(i - 1) >> i)
}
}
}
// io.debug_cv_out := current_x(NUM_ITERATIONS - 1)*cordic_K
val temp_cv_out = current_x(NUM_ITERATIONS - 1)*cordic_K
/* HV Find the square root of a real number in a pattern */
val next_x = (temp_cv_out + reg_x(NUM_ITERATIONS - 1)) >> 1
val next_y = (temp_cv_out - reg_x(NUM_ITERATIONS - 1)) >> 1
io.res.re := cordic_hv_square_root(next_x)
io.res.im := cordic_hv_square_root(next_y)
}
object cordic_complex_square_root{
def apply(x: Complex): Complex = {
/* * @io.op : Entered divisor A complex number represented by a fixed-point number Complex Input range R+ * @io.res : Output complex division result A complex number represented by a fixed-point number Complex Range R * details: utilize cordic Realize complex division , The period is 2* The number of iterations NUM_ITERATIONS **/
val unit = Module(new cordic_complex_square_root)
unit.io.op := x
unit.io.res
}
}
test
import org.scalatest._
import chisel3._
import chiseltest._
import chisel3.experimental._
import scala.math._
class Cordic_Complex_Square_Root_Tester extends FlatSpec with ChiselScalatestTester with Matchers {
behavior of "mytest2"
it should "do something" in {
val NUM_ITERATIONS = 20
test(new cordic_complex_square_root) {
c =>
val opre = 0.6
val opim = 0.6
c.io.op.re.poke(FixedPoint.fromDouble(opre, 32.W, 20.BP))
c.io.op.im.poke(FixedPoint.fromDouble(opim, 32.W, 20.BP))
// The control group
// val cv_out = pow(opre * opre + opim * opim, 0.5)
val opposite_resre = pow((pow(opre * opre + opim * opim, 0.5) + opre) / 2, 0.5)
val opposite_resim = pow((pow(opre * opre + opim * opim, 0.5) - opre) / 2, 0.5)
for (i <- 0 to NUM_ITERATIONS * 2) {
println(s"*****************${
i}******************")
println(s"res.re ${
c.io.res.re.peek}")
println(s"res.im ${
c.io.res.im.peek}\n")
// println(s"debug_cv_out ${c.io.debug_cv_out.peek}\n")
c.clock.step(1)
}
// println(s"cv_out ${cv_out}")
println(s"opposite_res.re ${
opposite_resre}")
println(s"opposite_res.im ${
opposite_resim}")
}
test(new cordic_complex_square_root) {
c =>
val opre = 3.0
val opim = -3.0
c.io.op.re.poke(FixedPoint.fromDouble(opre, 32.W, 20.BP))
c.io.op.im.poke(FixedPoint.fromDouble(opim, 32.W, 20.BP))
// The control group
val opposite_resre = pow((pow(opre * opre + opim * opim, 0.5) + opre) / 2, 0.5)
val opposite_resim = pow((pow(opre * opre + opim * opim, 0.5) - opre) / 2, 0.5)
c.clock.step(41)
println(s"res.re ${
c.io.res.re.peek}")
println(s"res.im ${
c.io.res.im.peek}\n")
println(s"opposite_res.re ${
opposite_resre}")
println(s"opposite_res.im ${
opposite_resim}")
}
}
}
// perform sbt "testOnly Cordic_Complex_Square_Root_Tester"
版权声明
本文为[AlwaysDayOne]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204220648125225.html
边栏推荐
- Innovation and management based on Scrum
- 学习正则表达式选项、断言
- The way to conquer C language
- 《信息系统项目管理师总结》第六章 项目人力资源管理
- Numpy stack function
- Chapter IV project cost management of information system project manager summary
- 第46届ICPC亚洲区域赛(昆明) B Blocks(容斥+子集和DP+期望DP)
- 接口请求时间太长,jstack观察锁持有情况
- Flink learning (XI) watermark
- Sonic cloud real machine tutorial
猜你喜欢

How to build an integrated industrial Internet plus hazardous safety production management platform?

Traversée de l'arbre L2 - 006
![[wechat applet] set the bottom menu (tabbar) for the applet](/img/e2/98711dfb1350599cbdbdf13508b84f.png)
[wechat applet] set the bottom menu (tabbar) for the applet
Innovation and management based on Scrum

The input of El input input box is invalid, and error in data(): "referenceerror: El is not defined“
基于多态的职工管理系统源码与一些理解

ROP Emporium x86_ 64 7 ~ 8 questions

Solve the problem that PowerShell mining occupies 100% of cpu7 in win7

How can enterprises with major hazard installations ensure the completion of the digital construction task of double prevention mechanism by the end of the year
LeetCode 1450 - 1453
随机推荐
Modify the content of MySQL + PHP drop-down box
Store consumption SMS notification template
Practical combat of industrial defect detection project (II) -- steel surface defect detection based on deep learning framework yolov5
The penultimate K nodes in jz22 linked list
How to use C language to realize [guessing numbers game]
【工欲善其事必先利其器】论文编辑及文献管理(Endnote,Latex,JabRef ,overleaf)资源下载及使用指南
[unity3d] rolling barrage effect in live broadcasting room
Rhcsa day 3 operation
The usage of case when and select case when is very easy to use
OCR recognition PDF file
Kubernetes - detailed explanation of pod
MySQL insert free column
Linux Redis ——Redis HA Sentinel 集群搭建详解 & Redis主从部署
工业互联网+危化安全生产综合管理平台怎样建
How to deploy a website with only a server and no domain name?
Win view port occupation command line
Interim summary (Introduction + application layer + transportation layer)
Probabilistic model of machine learning
Chapter IV project cost management of information system project manager summary
Chapter VI project information management system summary