当前位置:网站首页>[现代控制理论]5_系统的可控性_controllability
[现代控制理论]5_系统的可控性_controllability
2022-08-09 11:11:00 【王崇卫】
[现代控制理论]11_现代控制理论串讲_完结_pdf获取
[现代控制理论]10_可观测性与分离原理_观测器与控制器
[现代控制理论]9_状态观测器设计_龙伯格观测器
[现代控制理论]8.5_线性控制器设计_轨迹跟踪simulink
[现代控制理论]8_LQR控制器_simulink
[现代控制理论]7_线性控制器设计_Linear Controller Design
[现代控制理论]6_稳定性_李雅普诺夫_Lyapunov
[现代控制理论]5_系统的可控性_controllability
[现代控制理论]4_PhasePortrait爱情故事动态系统分析
[现代控制理论]3_Phase_portrait 相图 相轨迹
[工程数学]1_特征值与特征向量
[现代控制理论]2_state-space状态空间方程
我将之前的笔记合并生成了pdf,如果有有需要,可以关注公众号“王崇卫”,在后台输入“DR_CAN笔记”。
系统的可控性DR_CAN的视频链接:
https://www.bilibili.com/video/BV1vx411j7ah?spm_id_from=333.999.0.0
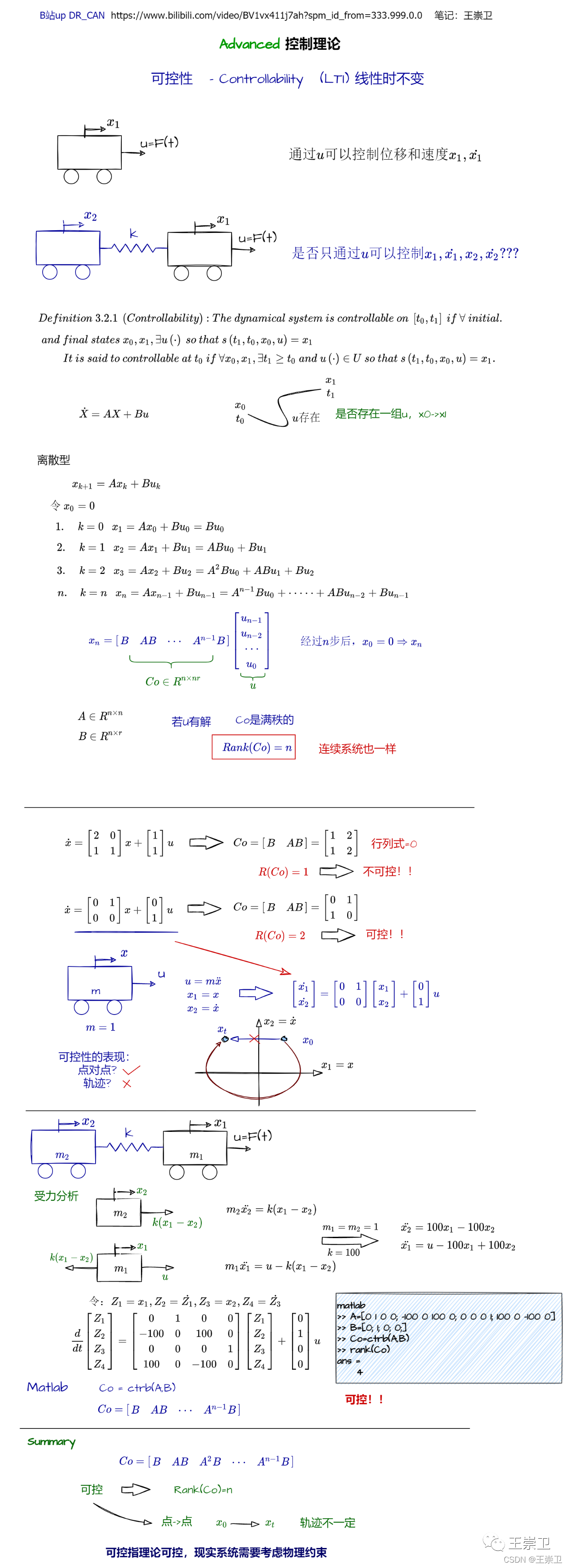
系统的可控性_controllability
- 通过小车弹簧系统引出讨论主题系统可控性controllability的问题。
- 我们通过一组u,是否能使得系统从x0->x1?
- 问题转为离散系统进行推导,发现,如果u都有解,那么Co矩阵必须是满秩的,连续系统也是一样的。
- 使用小车系统讨论,一个很有意思的话题,可控性的表现是点对点的可控?还是轨迹的可控?
- 结论:点对点的可控,轨迹并不一定可控。
- 工具:matlab可以通过,函数ctrb(A,B)求Co矩阵,再使用rank()函数获取Co矩阵的秩。发现小车弹簧系统可控。
- 可控是指理论的可控,现实系统需要考虑物理约束。
8.
被抛弃的写随笔公众号改写技术文章了,感兴趣的可以关注公众号:王崇卫
边栏推荐
- How tall is the B+ tree of the MySQL index?
- PAT1008
- golang 标准库json Marshal、Unmarshal坑
- FreeRTOS任务创建源码分析
- ICML 2022 | Out-of-Distribution检测与深最近的邻居
- wpf path xaml写法和c#写法对比
- focusablejs
- x86 Exception Handling and Interrupt Mechanism (1) Overview of the source and handling of interrupts
- Oracle数据库的两种进入方式
- x86 exception handling and interrupt mechanism (2) interrupt vector table
猜你喜欢
Error: Cannot find module ‘./application‘
为什么组合优先于继承

Cesium加载三维模型数据
x86 Exception Handling and Interrupt Mechanism (3) Interrupt Handling Process
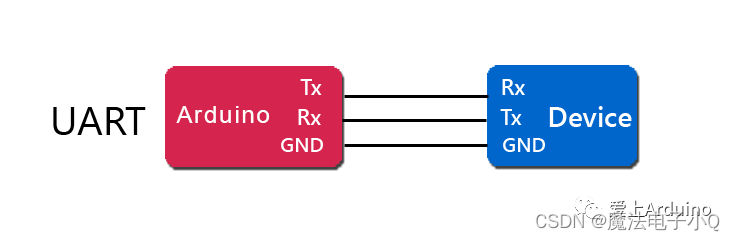
Arduino学习总结 + 实习项目

People | How did I grow quickly from programmer to architect?
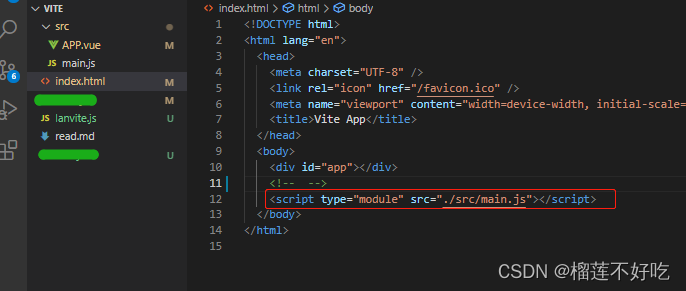
vite的原理,手写vite
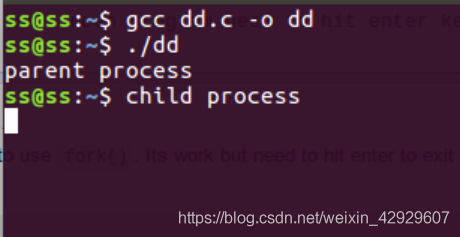
fork creates multiple child processes
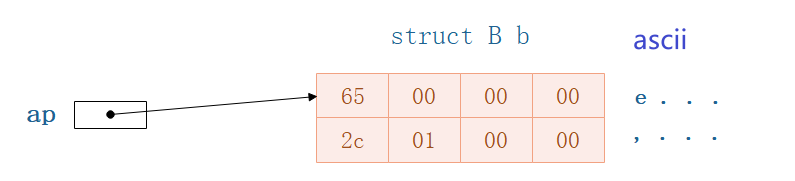
【精华文】C语言结构体特殊情况分析:结构体指针 / 基本数据类型指针,指向其他结构体
golang源代码阅读,sync系列-Pool
随机推荐
golang源代码阅读,sync系列-Pool
API接口是什么?API接口常见的安全问题与安全措施有哪些?
PTA习题 阶梯电价(C)
排序--快排(图解)
threejs+shader 曲线点运动,飞线运动
图片查看器viewer
1005 Spell It Right (20分)
【C language】动态数组的创建和使用
enum in c language
Arduino学习总结 + 实习项目
论文分享 | ACL2022 | 基于迁移学习的论元关系提取
es6对象迭代器iterator
wpf path xaml写法和c#写法对比
获取指定年度所有周的工具类
bit、byte、KB、M、G、T相互关系
微信小程序——天气查询
FreeRTOS任务创建源码分析
MDK添加注释模板
ECCV 2022 Oral | CCPL: 一种通用的关联性保留损失函数实现通用风格迁移
综述文章的写法