当前位置:网站首页>STM32对舵机SG90的PWM输出
STM32对舵机SG90的PWM输出
2022-04-22 07:05:00 【Wozart_Kate】
PWM的实现
单片机硬件基础与其计数原理
通用定时器


累加计数(向上计数)

交替计数

PWM占空比的设置
pwm.c
#include "pwm.h"
void TIM3_PWM_Init(u16 arr,u16 psc){
//TIM3 PWM初始化 arr重装载值 psc预分频系数
GPIO_InitTypeDef GPIO_InitStrue;
TIM_OCInitTypeDef TIM_OCInitStrue;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue;
//分别打开定时器,GPIO与复用接口的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能TIM3和相关GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能GPIOB时钟(LED在PB0引脚)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//使能AFIO时钟(定时器3通道3需要重映射到BP5引脚)
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_0; // TIM_CH3
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP; // 复用推挽
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz; //设置最大输出速度
GPIO_Init(GPIOB,&GPIO_InitStrue); //GPIO端口初始化设置
// GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE); //映射,重映射只用于64、100、144脚单片机
// 复用功能的重映射一般是指
// “在对应引脚被占用时,通过设置重映射RemapConfig的值来改变计时器(或其他设备)对应使用的引脚的值”
//当没有重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PA6,PA7,PB0,PB1
//当部分重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PB4,PB5,PB0,PB1 (GPIO_PartialRemap_TIM3)
//当完全重映射时,TIM3的四个通道CH1,CH2,CH3,CH4分别对应PC6,PC7,PC8,PC9 (GPIO_FullRemap_TIM3)
TIM_TimeBaseInitStrue.TIM_Period=arr; //设置自动重装载值(计数溢出值)
TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数(一频的周期数)
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //计数器向上溢出
// #define TIM_CounterMode_Up ((uint16_t)0x0000) 累加计数
// #define TIM_CounterMode_Down ((uint16_t)0x0010) 向下/累减计数
// #define TIM_CounterMode_CenterAligned1 ((uint16_t)0x0020) 交替计数,并在ARR处溢出
// #define TIM_CounterMode_CenterAligned2 ((uint16_t)0x0040) 交替计数,并在CNT=0处溢出
// #define TIM_CounterMode_CenterAligned3 ((uint16_t)0x0060) 交替计数,并在ARR和CNT=0处溢出
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //时钟的分频因子,起到了一点点的延时作用,一般设为TIM_CKD_DIV1(不稳定就用TIM_CKD_DIV2)
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStrue); //TIM3初始化设置(设置PWM的周期)
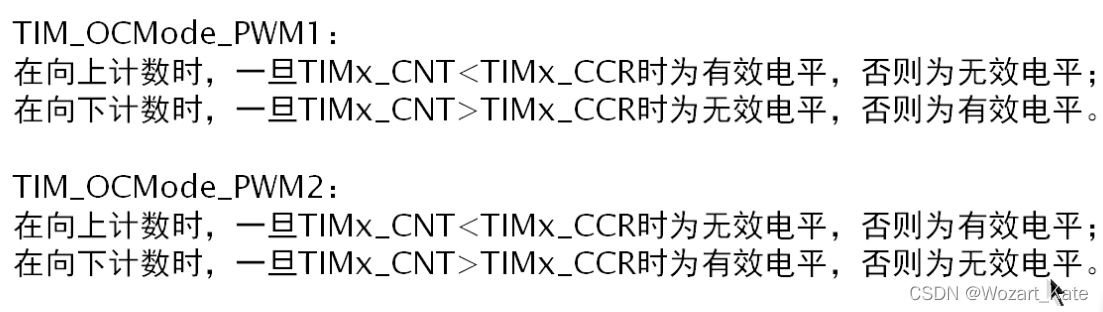
TIM_OCInitStrue.TIM_OCMode=TIM_OCMode_PWM1; // PWM模式1:CNT < CCR时输出有效电平
// #define TIM_OCMode_Timing ((uint16_t)0x0000)
// #define TIM_OCMode_Active ((uint16_t)0x0010)
// #define TIM_OCMode_Inactive ((uint16_t)0x0020)
// #define TIM_OCMode_Toggle ((uint16_t)0x0030)
// #define TIM_OCMode_PWM1 ((uint16_t)0x0060)
// #define TIM_OCMode_PWM2 ((uint16_t)0x0070)
TIM_OCInitStrue.TIM_OCPolarity=TIM_OCPolarity_High;// 设置极性-有效电平为:高电平
TIM_OCInitStrue.TIM_OutputState=TIM_OutputState_Enable;// 输出使能
TIM_OC3Init(TIM3,&TIM_OCInitStrue); //TIM3的通道3 PWM 模式设置
TIM_OC3PreloadConfig(TIM3,TIM_OCPreload_Enable); //使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); //使能TIM3
}
设置时钟
设置接口
将结构体中的装载值,分频系数与计数方式载入函数
设置高/低电平有效
使能寄存器与时钟
main.c实现对SG90的控制
int main (void){
//主程序
delay_ms(500); //上电时等待其他器件就绪
RCC_Configuration(); //系统时钟初始化
RELAY_Init();//继电器初始化
I2C_Configuration();//I2C初始化
OLED0561_Init(); //OLED初始化
OLED_DISPLAY_8x16_BUFFER(0," YoungTalk "); //显示字符串
OLED_DISPLAY_8x16_BUFFER(3," SG90 TEST2 "); //显示字符串
TOUCH_KEY_Init();//按键初始化
TIM3_PWM_Init(59999,23); //设置频率为50Hz,公式为:溢出时间Tout(单位秒)=(arr+1)(psc+1)/Tclk 20MS = (59999+1)*(23+1)/72000000
//Tclk为通用定时器的时钟,如果APB1没有分频,则就为系统时钟,72MHZ
//PWM时钟频率=72000000/(59999+1)*(23+1) = 50HZ (20ms),设置自动装载值60000,预分频系数24
while(1){
if(!GPIO_ReadInputDataBit(TOUCH_KEYPORT,TOUCH_KEY_A)){
//读触摸按键的电平
OLED_DISPLAY_8x16_BUFFER(6," Angle 0 "); //显示字符串
TIM_SetCompare3(TIM3,1500); //改变比较值TIM3->CCR2达到调节占空比的效果(1500为0度)
//void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3)通过设置Compare3来设置占空比
}
if(!GPIO_ReadInputDataBit(TOUCH_KEYPORT,TOUCH_KEY_B)){
//读触摸按键的电平
OLED_DISPLAY_8x16_BUFFER(6," Angle 45 "); //显示字符串
TIM_SetCompare3(TIM3,3000); //改变比较值TIM3->CCR2达到调节占空比的效果
}
if(!GPIO_ReadInputDataBit(TOUCH_KEYPORT,TOUCH_KEY_C)){
//读触摸按键的电平
OLED_DISPLAY_8x16_BUFFER(6," Angle 90 "); //显示字符串
TIM_SetCompare3(TIM3,4500); //改变比较值TIM3->CCR2达到调节占空比的效果
}
if(!GPIO_ReadInputDataBit(TOUCH_KEYPORT,TOUCH_KEY_D)){
//读触摸按键的电平
OLED_DISPLAY_8x16_BUFFER(6," Angle 180 "); //显示字符串
TIM_SetCompare3(TIM3,7500); //改变比较值TIM3->CCR2达到调节占空比的效果
}
}
}
版权声明
本文为[Wozart_Kate]所创,转载请带上原文链接,感谢
https://blog.csdn.net/Wozart_Kate/article/details/124233041
边栏推荐
猜你喜欢

Integrated optical access equipment 4-way 100m isolated Ethernet + 16-way E1 private network service 2m integrated service optical transceiver

laravel 自带分页查询

4E1+2路千兆隔离网络+4路百兆物理隔离网络PDH光端机

TP5 在 extend 目录下 自定义成功失败返回信息
Cherno_游戏引擎系列教程(5):101~

MYSQL04_算术、逻辑、位、运算符、运算符对应的习题
laravel 新建路由文件

OneNET连接流程
ACM入门之【容斥定理】

pycharm终端pip安装Error: “pip”项识别为 cmdlet、函数、脚本文件或可运行程序的名称
随机推荐
MYSQL05_ORDR BY排序、LIMIT分组、GROUP BY分组
汇编学习《汇编语言(第三版)》王爽著第三章学习
PHP创建微信代金券流程
Flink 指标参数源码解读(读取数量、发送数量、发送字节数、接收字节数等)
【ncnn】——param中-23300的意思
氧化镁MgO晶体基片|钛酸锶SrTiO3晶体基片|铌酸锂LiNbO3晶体基片;直径10mm
宝塔面板设置django纯接口和channel及mysql遇到的一些问题记录
汉源高科8路多业务PDH光端机双光口保护+8路E1+4路千兆以太网+4路百兆网络电口
Cherno_游戏引擎系列教程(5):101~
实验一、数据科学导论——数据科学认知
Integrated service PDH optical transceiver 4-way Gigabit isolated Ethernet + 4-way E1 private network service 2m integrated service optical transceiver
FileNotFoundError: [Errno 2] No such file or directory
MATLAB中的小技巧
Differences between routing modes
Data driven pytest1
Monkey introduction operation
OpenFeign组件的简介和使用
UI automatic login bypass verification code
PDH光端机综合多业务光接入设备双光口传16路E1 2M+4路千兆1000M网络+4路百兆共享网络机架式双电源
laravel8-使用jwt