当前位置:网站首页>目标检测基础
目标检测基础
2022-08-09 13:10:00 【花椒酱不吃花椒喵】
一阶段算法
https://zhuanlan.zhihu.com/p/61485202
二阶段算法
https://www.julyedu.com/question/big/kp_id/32/ques_id/2103
详解Faster RCNN
https://www.julyedu.com/question/big/kp_id/32/ques_id/2918
map
rank=1 precision=1.00 and recall=0.14
----------
rank=2 precision=1.00 and recall=0.29
----------
rank=3 precision=0.66 and recall=0.29
----------
rank=4 precision=0.50 and recall=0.29
----------
rank=5 precision=0.40 and recall=0.29
----------
rank=6 precision=0.50 and recall=0.43
----------
rank=7 precision=0.43 and recall=0.43
----------
rank=8 precision=0.38 and recall=0.43
----------
rank=9 precision=0.44 and recall=0.57
----------
rank=10 precision=0.50 and recall=0.71
----------对于上述PR值,如果我们采用:VOC2010之前的方法,我们选取Recall >= 0, 0.1, …, 1的11处Percision的最大值:1, 1, 1, 0.5, 0.5, 0.5, 0.5, 0.5, 0, 0, 0。此时Aeroplane类别的 AP = 5.5 / 11 = 0.5VOC2010及以后的方法,对于Recall >= 0, 0.14, 0.29, 0.43, 0.57, 0.71, 1,我们选取此时Percision的最大值:1, 1, 1, 0.5, 0.5, 0.5, 0。此时Aeroplane类别的 AP = (0.14-0)*1 + (0.29-0.14)*1 + (0.43-0.29)*0.5 + (0.57-0.43)*0.5 + (0.71-0.57)*0.5 + (1-0.71)*0 = 0.5mAP就是对每一个类别都计算出AP然后再计算AP平均值就好了
在VOC2010以前,只需要选取当Recall >= 0, 0.1, 0.2, …, 1共11个点时的Precision最大值,然后AP就是这11个Precision的平均值。在VOC2010及以后,需要针对每一个不同的Recall值(包括0和1),选取其大于等于这些Recall值时的Precision最大值,然后计算PR曲线下面积作为AP值。
# VOC-style mAP,分为两个计算方式,之所有两个计算方式,是因为2010年后VOC更新了评估方法,因此就有了07-metric和else...
def voc_ap(rec, prec, use_07_metric=False):
"""
average precision calculations
[precision integrated to recall]
:param rec: recall list
:param prec: precision list
:param use_07_metric: 2007 metric is 11-recall-point based AP
:return: average precision
"""
if use_07_metric:
# 11 point metric
ap = 0.
# VOC07是11点插值的AP方式,等于是卡了11个离散的点,划分10个区间来计算AP
for t in np.arange(0., 1.1, 0.1):
if np.sum(rec >= t) == 0:
p = 0 # recall卡的阈值到顶了,1.1
else:
p = np.max(prec[rec >= t]) # VOC07:选择每个recall区间内对应的最高precision的计算方案
ap = ap + p / 11. # 11-recall-point based AP
else:
# correct AP calculation
# first append sentinel values at the end
mrec = np.concatenate(([0.], rec, [1.]))
mpre = np.concatenate(([0.], prec, [0.]))
# compute the precision envelope
for i in range(mpre.size - 1, 0, -1):
mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i]) # 这个是不是动态规划?从后往前找之前区间内的top-precision,多么优雅的代码呀~~~
# to calculate area under PR curve, look for points where X axis (recall) changes value
# 上面的英文,可以结合着fig 2的绿框理解,一目了然
# VOC10是是根据recall值变化的区间来计算的,如果recall变化很多次,就可以认为是一种 “伪” 连续的方式计算了,以下求的是recall的变化
i = np.where(mrec[1:] != mrec[:-1])[0]
# 计算AP,这个计算方式有点玄乎,是一个积分公式的简化,应该是对应的fig 2中红色曲线以下的面积,之前公式的推导我有看过,现在有点忘了,麻烦各位同学补充一下
# 现在理解了,不难,公式:sum (\Delta recall) * prec,其实结合fig2和下面的图,不就是算的积分么?如果recall划分得足够细,就可以当做连续数据,然后以下公式就是积分公式,算的precision、recall下面的面积了
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1])
return ap
https://zhuanlan.zhihu.com/p/48992451
https://www.zhihu.com/question/53405779
nms计算
非极大值抑制嘛,就是只留下极大值的意思
基于前面的网络(如RPN)能为每个框给出一个score,score越大证明框越接近期待值。两个目标分别有多个选择框,现在要去掉多余的选择框。分别在局部选出最大框,然后去掉和这个框IOU>0.7的框。
代码如下:
# --------------------------------------------------------
# Fast R-CNN
# Copyright (c) 2015 Microsoft
# Licensed under The MIT License [see LICENSE for details]
# Written by Ross Girshick
# --------------------------------------------------------
import numpy as np
def py_cpu_nms(dets, thresh):
"""Pure Python NMS baseline."""
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= thresh)[0]
order = order[inds + 1]
return keep
原文链接:https://blog.csdn.net/leviopku/article/details/80886386
mmdetection代码解析 https://zhuanlan.zhihu.com/p/84416299
https://github.com/amusi/Deep-Learning-Interview-Book/blob/master/docs/%E8%AE%A1%E7%AE%97%E6%9C%BA%E8%A7%86%E8%A7%89.md
【cs231n】https://blog.csdn.net/poulang5786/category_7521185.html
边栏推荐
- Process/Thread Related in Sandbox - 2
- 32位机器和64位机器基本数据类型长度
- IDEA Gradle 常遇问题(二)(持续更新)
- gin的中间件和路由分组
- R language kaggle game data exploration and visualization
- GIN Bind mode to get parameters and form validation
- Record the system calls and C library functions used in this project-2
- 富媒体在客服IM消息通信中的秒发实践
- 行程和用户[阅读理解法]
- Unity3d_API_GPS_LocationService
猜你喜欢
error Trailing spaces not allowed no-trailing-spaces 9:14 error Unexpected trailing comma
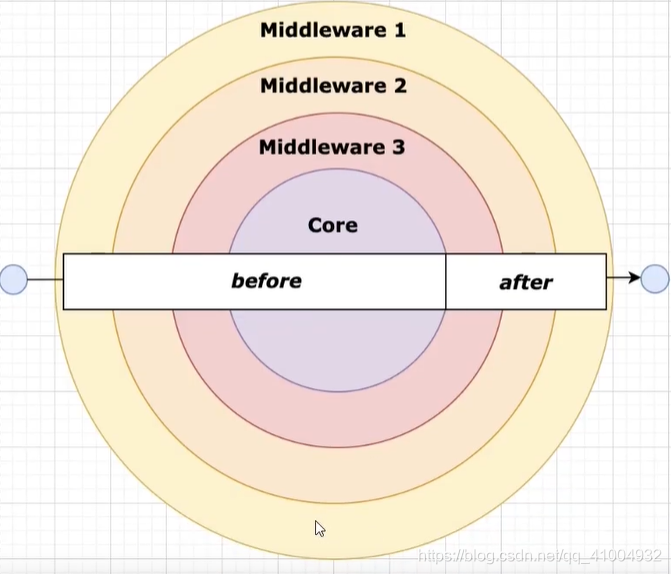
gin的中间件和路由分组
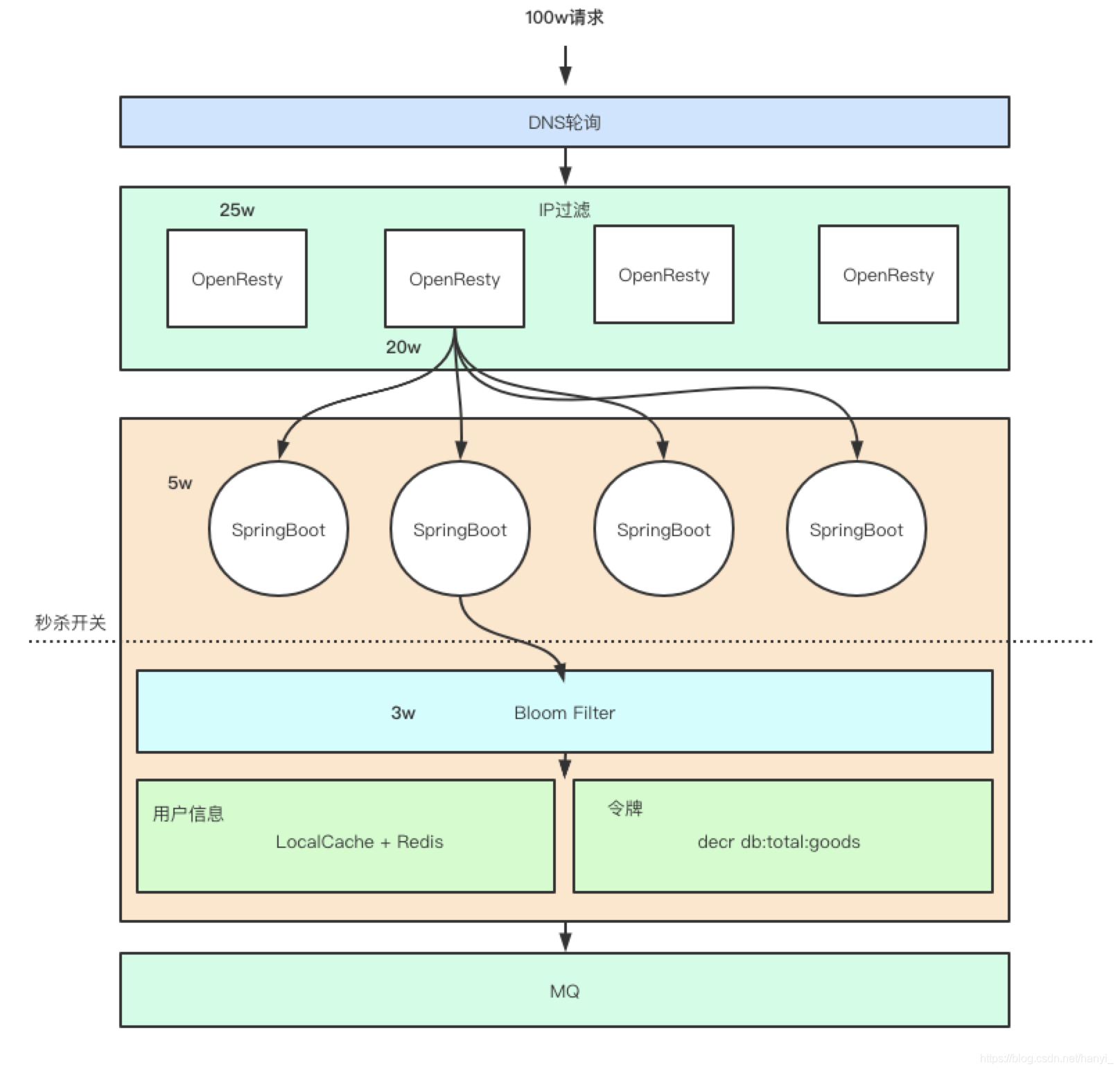
面试攻略系列(二)-- 秒杀系统

Uni - app - uview Swiper shuffling figure component, click on the links to jump (click to get the item after the row data, remove data operation)
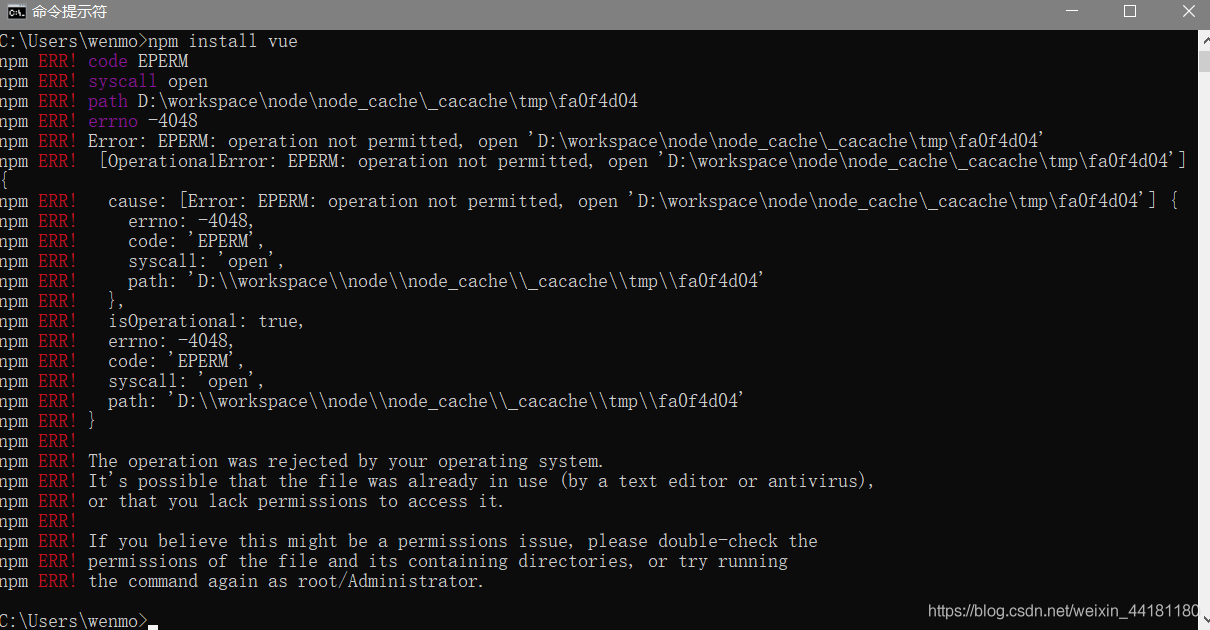
npm install失败
海康设备获取YV12图像-不用rtsp
Q_04_05 使用Qubits
蓝桥历届真题-既约分数

PO、DO、TO、VO、DO、DTO、DAO、POJO都是什么?

pytest 之 allure报告
随机推荐
RTSP协议讲解
蓝桥历届真题-蛇形填数
Professor Chen Qiang's "Machine Learning and R Application" course Chapter 13 Assignment
【NVIDIA】Tesla V100安装NVIDIA-Driver驱动程序适配CUDA-Toolkit-11.6
opencv-matchTemplate 之使用场景为大图里面找小图
正则表达式-re模块
GIN a preliminary study, the environment is installed
The sword refers to the offer, cuts the rope 2
音频基础学习——声音的本质、术语与特性
javscript基础易错点集合
RobotFramework 之 条件判断
PO、DO、TO、VO、DO、DTO、DAO、POJO都是什么?
2个有序数组排序
Realization of RTSP Protocol
面试攻略系列(三)-- 高级开发工程师面试问些啥?
微信实现扫码支付(native)
DCT变换与反变换
JS动画函数封装
FFmpeg多媒体文件处理(FFMPEG日志系统)
FFmpeg multimedia file processing (ffmpeg prints audio and video Meta information)