当前位置:网站首页>KITTI数据集简介(一)—— 传感器介绍
KITTI数据集简介(一)—— 传感器介绍
2022-08-08 16:54:00 【泉伟】
1.KITTI数据集概述
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成[1] ,以10Hz的频率采样及同步。总体上看,原始数据集被分类为’Road’, ’City’, ’Residential’, ’Campus’ 和 ’Person’。对于3D物体检测,label细分为car, van, truck, pedestrian, pedestrian(sitting), cyclist, tram以及misc组成。
KITTI官网如下图所示,我们将按照不同的数据类型进行介绍。
2.传感器介绍
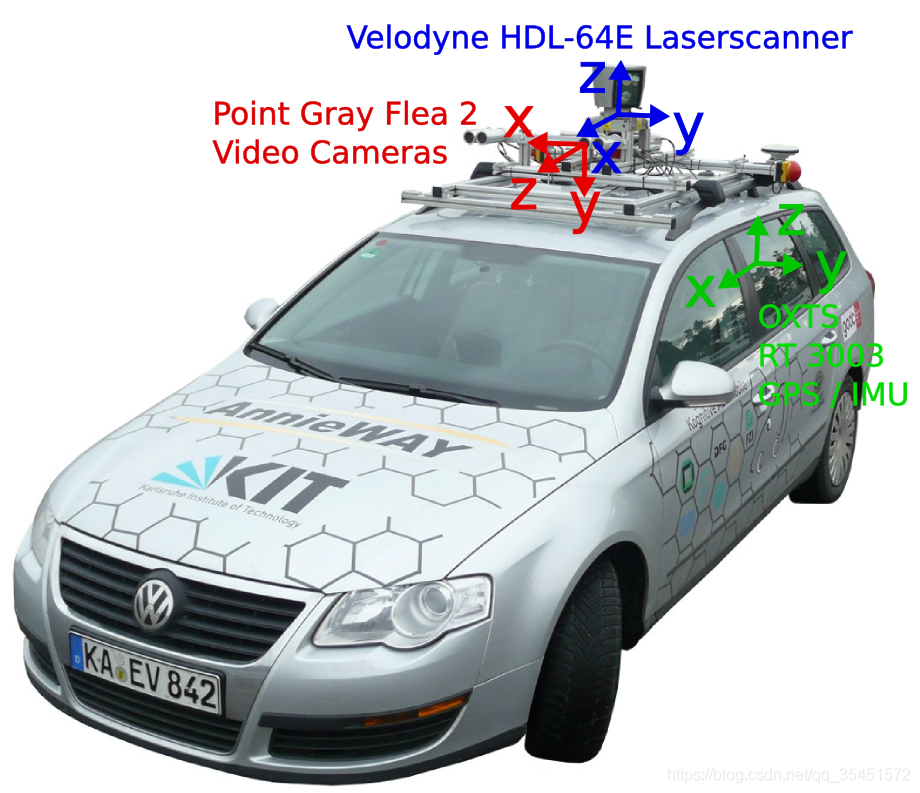
| 名称 | 型号 | 数量 | 简介 |
|---|---|---|---|
| Inertial Navigation System (GPS/IMU) | OXTS RT 3003 | 1 | GPS导航与惯性传感器(IMU |
| Laserscanner | Velodyne HDL-64E | 1 | 三维数据采集的激光雷达 |
| Grayscale cameras | 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3M-C) | 2 | 灰度相机 |
| Color cameras | 1.4 Megapixels: Point Grey Flea 2 (FL2-14S3C-C) | 2 | 彩色相机 |
| Varifocal lenses | 4-8 mm: Edmund Optics NT59-917 | 4 | 变焦距透镜 |
惯性传感器简介
惯性传感器是一种传感器,主要是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(DoF)运动,是解决导航、定向和运动载体控制的重要部件。
| 级别 | 应用级别 | 主要应用 |
|---|---|---|
| 低精度MEMS惯性传感器 | 消费电子类产品 | 主要用在手机、GPS导航、游戏机、数码相机、音乐播放器、无线鼠标、PD、硬盘保护器、智能玩具、计步器、防盗系统 |
| 中级MEMS惯性传感器 | 工业级及汽车级产品 | 则主要用于汽车电子稳定系统(ESP或ESC)GPS辅助导航系统,汽车安全气囊、车辆姿态测量、精密农业、工业自动化、大型医疗设备、机器人、仪器仪表、工程机械等。 |
| 高精度的MEMS惯性传感器 | 军用级和宇航级产品 | 主要要求高精度、全温区、抗冲击等指数。主要用于通讯卫星无线、导弹导引头、光学瞄准系统等稳定性应用;飞机/导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GP战场机器人等 |

OXTS RT 3003传感器就是一个中级惯性传感器,记录一个完整的三维运动和动力学轮廓与GNSS +惯性传感器融合。提供平滑、健壮和可重复的实时输出,具有低延迟。完全集成的高档MEMS IMU和RTK能力的GNSS接收器记录了一个全面的测量列表,包括位置、速度、加速度和方位。
激光雷达
http://img54.chem17.com/9/20160401/635951067349792061224.jpg
HDL-64E,使用64个激光器,同样为905nm,脉冲宽度为5ns的一级人眼安全激光,探测距离增加到120m,每秒可以获得133万个点云数据,垂直张角为+3°至-23°,水平方向360°扫描,扫描准确度小于2cm,垂直角分辨率为1.33°,水平角分辨率为0.16°(600rpm)。同样是IP67级的环境防护,内置MEMS加速传感器和陀螺仪,预留GPS和IMU数据接口,使GPS和IMU可以整合在雷达输出的数据中,可以应对多种使用环境,使用100MBPS UDP以太网传输数据,使用15V+/-1.5V,4Amps的直流电源供电。zui大外形尺寸为140mm140mm254mm,重量小于13Kg。
灰度相机与彩色相机

| 属性 | 灰度相机 | 彩色相机 |
|---|---|---|
| 分辨率 | 高 | 低 |
| 通道数 | 1 | 3 |
通过上边的对比我们就能够看出,不同的摄像机是有不同的数据特点,在彩色相机获取色彩的条件下尽可能让灰度相机提高识别的精度。
变焦距透镜
变焦距透镜是一种可变焦距的照相机镜头,焦距随着焦距(放大倍数)的变化而变化,与焦焦(“真”)变焦透镜相比,随着透镜变焦(焦距和放大倍数的变化)焦距透镜仍保持焦距。许多所谓的“变焦”透镜,特别是在固定透镜相机的情况下,实际上是变焦距透镜[1 ],这使得透镜设计者在光学设计权衡(焦距范围、最大孔径、尺寸、重量、成本)方面比对焦变焦更具灵活性。这些都是实用的,因为自动对焦,因为相机处理器可以自动调整镜头,以保持焦距,同时改变焦距(“变焦”),使操作几乎没有区别于变焦。
3.传感器安装位置
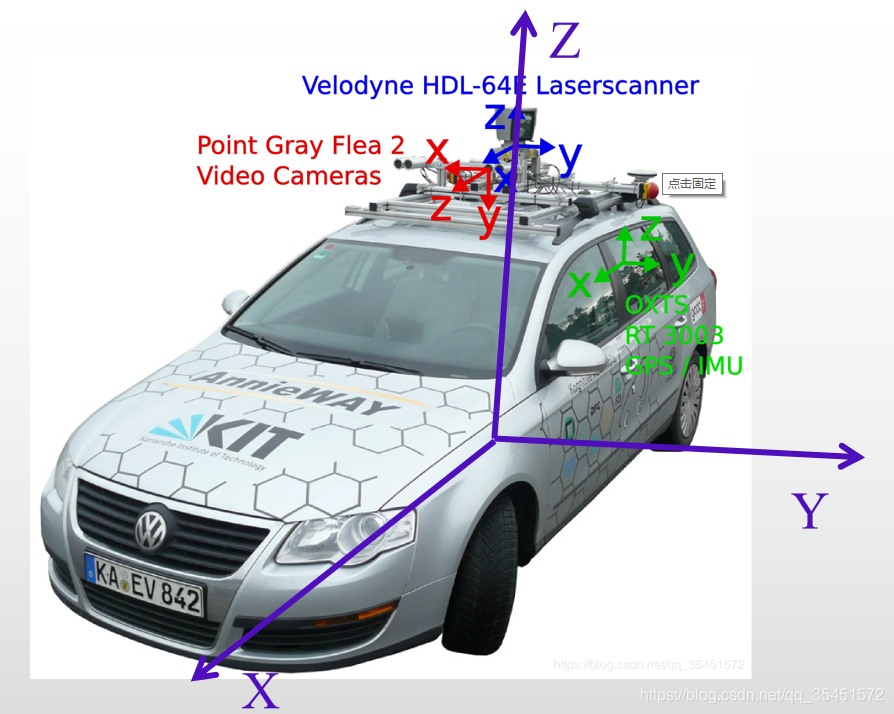

| 名称 | 型号 | x | y | z |
|---|---|---|---|---|
| IGPS/IMU | GPS导航与惯性传感器 | -0.81 | 0.32 | 0.93 |
| Velodyne Laserscanner | 激光雷达 | 0 | 0 | -1.73 |
| Cam 0(gray) | 灰度相机 | 027 | 0 | 1.65 |
| Cam 1(gray) | 灰度相机 | 0.27 | -0.54 | 1.65 |
| Cam 2(color) | 彩色相机 | 0.27 | 0.06 | 1.65 |
| Cam 3color) | 彩色相机 | 0.27 | 0.46 | 1.65 |
相对于地面坐标(紫色坐标系)为上表所示。
参考
- The KITTI Vision Benchmark Suite:http://www.cvlibs.net/datasets/kitti/index.php
- 惯性传感器[百度百科]:https://baike.baidu.com/item/惯性传感器/5302574?fr=aladdin
- RT3003s used to score AutoDrive Challenge competition - OxTS:https://www.oxts.com/rt3003s-used-score-autodrive-challenge-competition/
- 可实现实时的三维数据采集的激光雷达_中国化工仪器网:http://www.chem17.com/tech_news/detail/925557.html
边栏推荐
猜你喜欢




![Acwing Week 63 [Unfinished]](/img/ad/aee803fddbba688366ca8f3e772764.png)
![[Paper Reading] RAL 2022: Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Convolutions](/img/6c/2d8469b2113f6c23c5b75e6f6e479e.png)


{kind=link}
随机推荐
ESP8266-Arduino编程实例-ADXL345三轴加速计驱动
3dsmax2021软件安装教程
字节一面:TCP 和 UDP 可以使用同一个端口吗?
L2-020 功夫传人 (25 分)
二、pytest+selenium+allure实现web ui自动化
最稳定的淘宝商品详情接口
智能指针学习笔记
bzoj1269 [AHOI2006]文本编辑器editor
LeetCode_Backtrack_Medium_491. Incrementing Subsequence
ASP.NET Core依赖注入之旅:4.体验服务的注册和消费
linux安装部署redis&配置远程连接
它们不一样!透析【观察者模式】和【发布订阅模式】
Using PyGame's Bubble Sort Visualizer
L2-022 重排链表 (25 分)(模拟链表)
[Paper Reading] RAL 2022: Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Convolutions
Kubernetes资源编排系列之四: CRD+Operator篇
暴力解决MySQL出现的莫名其妙的问题-重启服务!
【LeetCode】Exam Summary: Depth-First Search (DFS)
【8.7】代码源 - 【抽卡】【LCM与GCD】
【MySQL哪些字段适合建索引,哪些查询条件会导致索引失效】