当前位置:网站首页>Point cloud registration (I) - ICP method
Point cloud registration (I) - ICP method
2022-04-22 10:31:00 【Coding leaves】
The essence of point cloud registration is to transform the point cloud from one coordinate system to another .
Point cloud registration usually requires two point cloud data . The first type of point cloud data is called original point cloud , use S(source) To express . The second type of point cloud data is called target point cloud , use T(Target) To express .
Point cloud registration is to make the original point cloud S At the target point cloud T Display on the coordinates of . We can determine the transformation relationship of coordinates by finding the point cloud with similar characteristics in the point cloud . for example , The point cloud of the same object appears in both the original point cloud and the target point cloud , And there are some point clouds with similar characteristics in the two point clouds , According to these similar point cloud information, the transformation relationship is calculated .
Suppose that the rigid body transformation occurs from the original point cloud to the target point cloud , That is, the original point cloud can get the target point cloud through rotation and translation . The rotation and translation processes here use the rotation transformation matrix R Peaceshift transformation matrix T To express . We use it P(S) Represents the point in the original point cloud ,P(T) Represents the point of the original point cloud in the target point cloud coordinate system . Then this transformation relationship can be expressed as :

therefore , The main task of point cloud registration is to calculate the rotation matrix R Peaceshift matrix T.
Iterative nearest point algorithm (Iterative Closest Point, ICP)
First step : initialization R、T matrix , according to R、T Matrix can get P(T), That is, the coordinates of the original point cloud in the target point cloud coordinate system .
The second step : Look for and in the target point cloud P(T) Some recent , And the distance is less than the specified threshold , This threshold can be defined by yourself .
The third step : Calculate the Euclidean distance error for the matched points in the second step , And the least square method is used to optimize R、T matrix .
Step four : Optimize the third step R、T The matrix goes back to the first step , Re iterate , Until the iteration meets the requirements , Get the final optimized R、T matrix .
ICP Methods classification
ICP Methods can be divided into point-to-point (PointToPoint) And point to plane (PointToPlane) Two types of .
PointToPoint: Calculation P(t) And target point cloud T The distance is in the form of point-to-point distance .
PointToPlane: Calculation P(t) Midpoint to target point cloud T The distance from the plane where the point of , The normal vector of the target point cloud is usually used here .
More 3D 、 Please pay attention to two-dimensional perception algorithm and financial quantitative analysis algorithm “ Lele perception school ” WeChat official account , And will continue to update .

版权声明
本文为[Coding leaves]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204221026184771.html
边栏推荐
猜你喜欢

Challenges of enterprise web development

TC397 EVADC

Qt关于信号槽连接出现的一些问题记录

【leetcode】145.二叉树的后序遍历
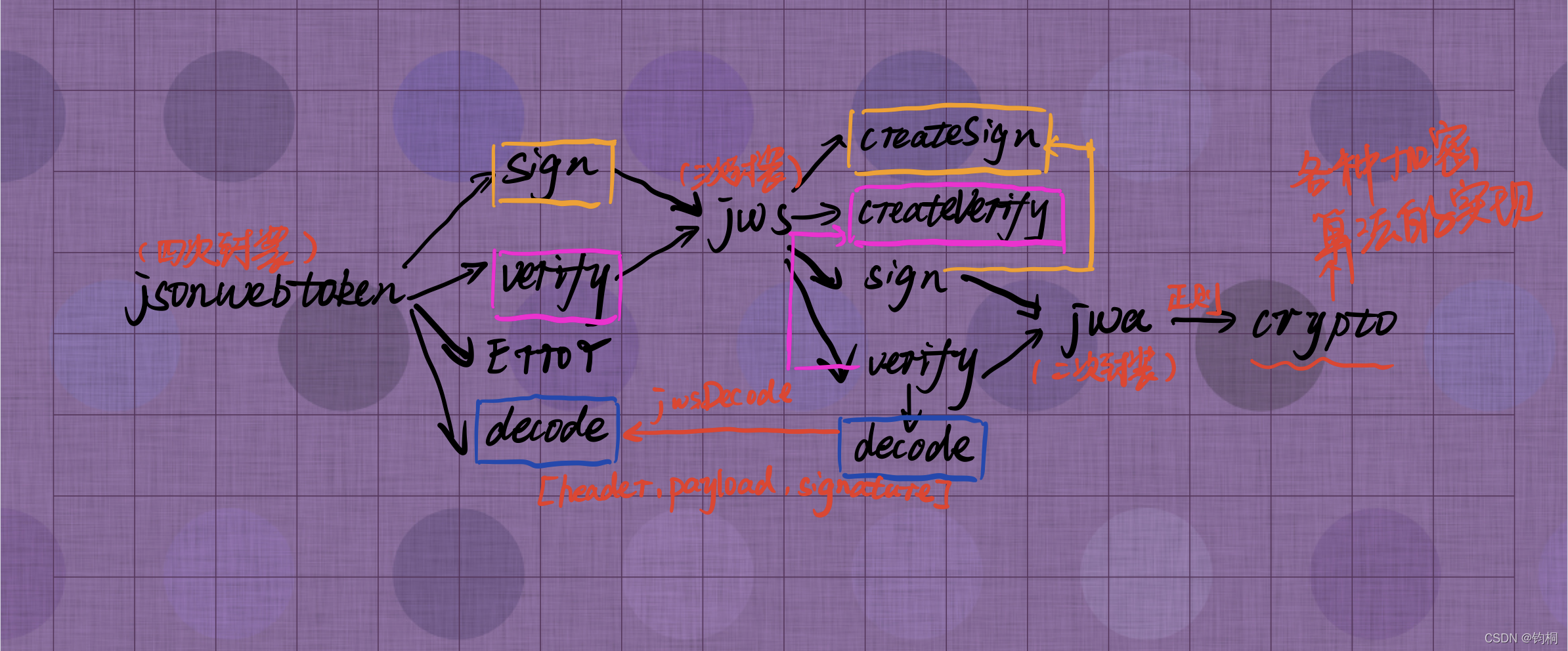
JWT source code analysis (four layer package with schematic diagram)
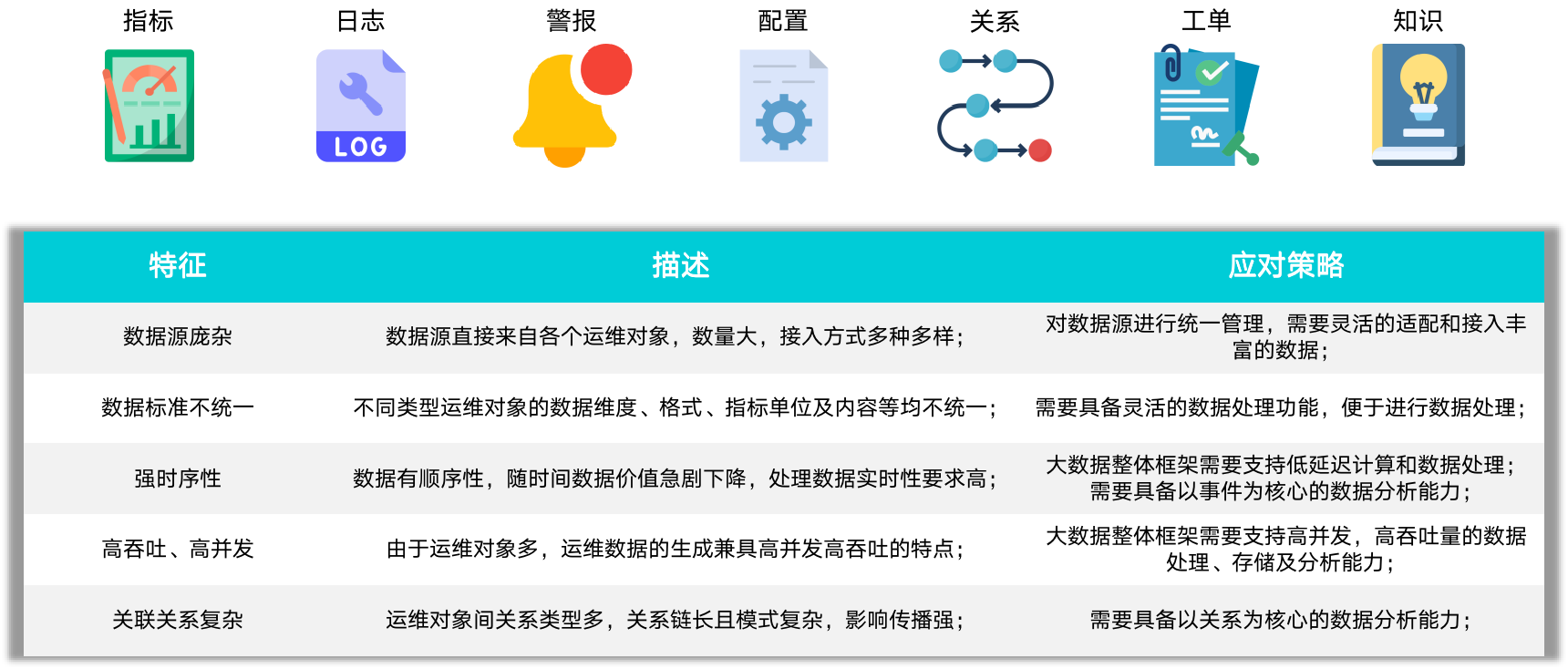
数字化时代,企业运维面临现状及挑战分析解读

谷歌开发者工具preserve log
![[leetcode] the first mock exam of two tree traversal iteration method.](/img/2a/4fb0de0f001738729a0051c14a1e5d.jpg)
[leetcode] the first mock exam of two tree traversal iteration method.

《日志:每个软件工程师都应该了解实时数据的统一抽象》
checkbox的使用
随机推荐
Some functions of qbytearray are used for conversion
Cobbler cobbler cobbler
Tree DP - p1122 maximum subtree sum
TC397 MCMCAN
MyNodeQuery 1.0.2.2 发布,Ping节点指定IPv4或IPv6、仪表盘增加排序
Google Adsense suggests that the advertising capture tool is wrong, which may lead to reduced revenue. What should we do
启动mongodb时发现错误libcrypto.so.10
Several forms of PAAS hybrid cloud based on container
《MySQL 是怎样运行的:从根儿上理解 MySQL 》优质笔记
[required for design!] Common color matching table for Web Design
OneFlow学习笔记:从Functor到OpExprInterpreter
下一代web服务器Caddy —— 筑梦之路
分析API响应慢
The debug breakpoint of idea thread pool cannot jump in
[issue 307] in terms of implementation principle, why is Nacos so strong?
vmware虚拟机下载并安装教程
golang time strings常用方法
Query process of 004-mysql
golang 时间格式化
【leetcode】145. Binary Tree Postorder Traversal