当前位置:网站首页>[point cloud series] relationship based point cloud completion
[point cloud series] relationship based point cloud completion
2022-04-23 13:17:00 【^_^ Min Fei】
List of articles
1. Summary
TVCG 2021 Periodical , Point cloud completion
Address of thesis :https://ieeexplore.ieee.org/abstract/document/9528986
2. motivation
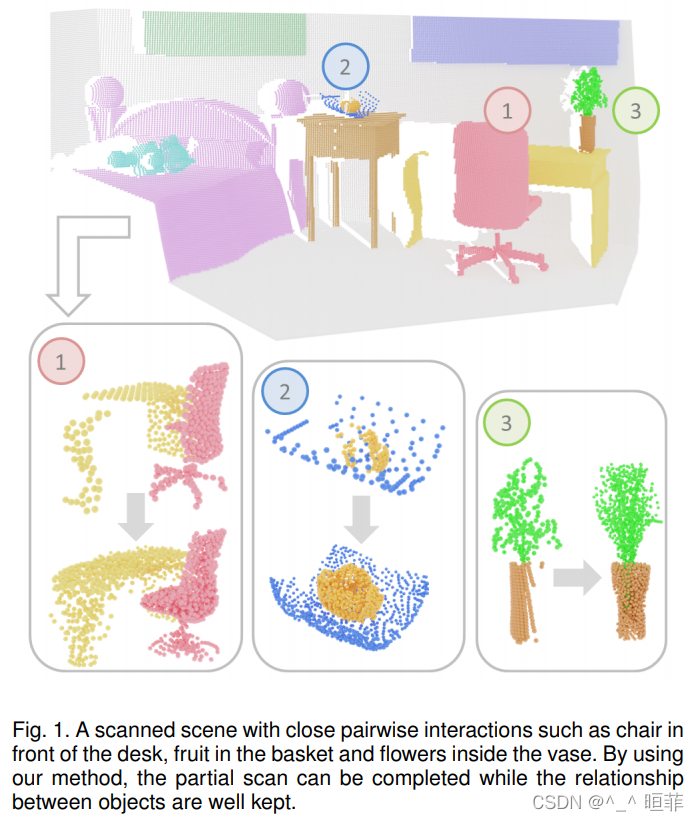
For the scene of multi object combination Partial completion
Pay close attention to : Whether the two objects are close in space in the scene
As shown in the figure : That is, two objects with similar space refer to each other to complete
3. Method
Problem definition :
Given a partial point cloud after segmentation , There are two parts , Belong to different objects
The goal is : Complete each part
Assume : Assume The input is obtained from a scan , This is more challenging than capturing scenes from multiple directions . In theory , Our method can also be used to construct multi-directional scanning .
Two way network :
Why two-way network : In fact, it's because of two possible incomplete objects O a O_a Oa and O b O_b Ob, Let's see which of these objects is completed first , If it's first A Again B So it's the left branch in the figure below , If it's first B Again A So it's the right branch .

Optimize the network by using consistency constraints , I hope the more similar the results of the two branches, the better . It is ensured by the parameter mapping of the graph .
reference :https://consistency.epfl.ch/
This way is also called : Conditional completion .
The definition is as follows :

Overall network framework :
Network based on self encoder :
The short answer is
- Encode all input point cloud features first , Then maximize the pool to get A global feature g 1 g_1 g1
- Then extend g 1 g_1 g1 And contain only the features of the object that need to be completed ( yellow ), Then maximize the pool into global features g 2 g_2 g2
- Last use TopNet To complete what needs to be completed

Loss function :
- Shape loss :EMD
- Loss of consistency : Defined in two different paths EMD distance .
Training process :
- Train first Step1 The Internet
- Training Step2 The Internet ;
- Train the whole network ;
4. experiment
Data sets :
from [29] Build it , That is to say Interaction context (ICON): Towards a geometric functionality
descriptor The data set of this article .
contain 6 Data sets of different combination types , Here's the picture 4:
- desk-chair
- vase-flower
- hanger-clothes
- basket-object
- handcart-object
- stand-hat
Partial scan simulation :
- First, calculate the region of interest , Pictured 4 Shown , Use IBS[28] To extract
- Then after extraction IBS Upper sampling point
- Then, the bounding boxes of these sampling points are calculated as the interactive region of interest .
- These bounding boxes are normalized by coordinates , The visitor's center is regarded as the central point of interaction .
- Then randomly sample different camera positions at the center of the region of interest 1024 A point for each object , Remove the situation where one object obscures another .
Visualization :


experimental result :

Ablation Experiment :

chart 2:
• v1: PCN-encoder + PCN-decoder
• v2: PCN-encoder + topnet-decoder
• v3: Our-encoder + PCN-decoder
• v4 (ours): Our-encoder + topnet-decoder
Yes no Verification of consistency loss :


Robust to noise

5. Spatial relations
This is partly because I am interested in , Pay attention to .
[27] Use the correlation matrix to encode the spatial relationship
[28] Put forward Interaction Bisector Surface (IBS) To capture interactive information , Include Geometric and topological features ;
[29] IBS + IR( Interaction area ) To encode more geometric features .
The above methods are used to complete 3D Of the scene
The following method is to capture the spatial relationship between point clouds :
[30] Figure network , combination 2D and 3D Set information to guide the expression of association relationship
[31] The overlap of the border after mapping Separated by the nearest distance between two objects , Then calculate the spatial correlation .
[32] and [33]: The joint Gaussian distribution is used to express the spatial relationship of different objects in a scene .
[34] Methods based on deep learning , Measure relationships by nearest neighbors
[35] Use the attention mechanism to capture the relationship between a point and its adjacent points .
Corresponding literature :
[27] M. Fisher, D. Ritchie, M. Savva, T. Funkhouser, and P. Hanrahan, “Example-based synthesis of 3d object arrangements,” ACM Trans. Graph., vol. 31, no. 6, pp. 135:1–135:11, 2012.
[28] X. Zhao, H. Wang, and T. Komura, “Indexing 3d scenes using the interaction bisector surface,” ACM Transactions on Graphics (TOG), vol. 33, no. 3, pp. 22:1–22:14, 2014.
[29] R. Hu, C. Zhu, O. van Kaick, L. Liu, A. Shamir, and H. Zhang, “Interaction context (ICON): Towards a geometric functionality descriptor,” ACM Transactions on Graphics, vol. 34, 2015.
[30] X. Qi, R. Liao, J. Jia, S. Fidler, and R. Urtasun, “3d graph neural networks for RGBD semantic segmentation,” in 2017 IEEE International Conference on Computer Vision (ICCV), 2017, pp. 5209–5218, ISSN: 2380-7504.
[31] Y. Song, Z. Sun, Y. Wu, and H. Li, “Coarse-to-fine segmentation for indoor scenes with progressive supervision,” Computer Aided Geometric Design, vol. 75, p. 101775, 2019.
[32] M. Alberti, P. Jensfelt, and J. Folkesson, “Relational approaches for joint object classification andscene similarity measurement in indoor environments,” in AAAI Spring Symposium Qualitative Representations for Robots March 24–26 2014, Palo Alto, USA. The AAAI Press, 2014.
[33] M. Sunkel, S. Jansen, M. Wand, and H.-P. Seidel, “A correlated parts model for object detection in large 3d scans,” in Computer Graphics Forum, vol. 32. Wiley Online Library, 2013, pp. 205–214.
[34] Y. Liu, B. Fan, S. Xiang, and C. Pan, “Relation-shape convolutional neural network for point cloud analysis,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2019, pp. 8895–8904.
[35] Z. Li, J. Zhang, G. Li, Y. Liu, and S. Li, “Graph attention neural networks for point cloud recognition,” in 2019 IEEE International Conference on Multimedia and Expo (ICME). IEEE, 2019-07, pp. 387–392.
版权声明
本文为[^_^ Min Fei]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230611136919.html
边栏推荐
- [untitled] make a 0-99 counter, P1 7 connected to key, P2 connected to nixie tube section, common anode nixie tube, P3 0,P3. 1. Connect the nixie tube bit code. Each time you press the key, the nixie
- AUTOSAR from introduction to mastery 100 lectures (81) - FIM of AUTOSAR Foundation
- Design and manufacture of 51 single chip microcomputer solar charging treasure with low voltage alarm (complete code data)
- MySQL 8.0.11下载、安装和使用可视化工具连接教程
- @优秀的你!CSDN高校俱乐部主席招募!
- Analysis of the latest Android high frequency interview questions in 2020 (BAT TMD JD Xiaomi)
- AUTOSAR from introduction to mastery 100 lectures (87) - key weapon of advanced EEA - AUTOSAR and DDS
- 2021年6月程序员工资统计,平均15052元,你拖后腿了吗?
- web三大组件之Servlet
- 2020最新Android大厂高频面试题解析大全(BAT TMD JD 小米)
猜你喜欢

Vscode tips

【快排】215. 数组中的第K个最大元素

LeetCode_ DFS_ Medium_ 695. Maximum area of the island

@优秀的你!CSDN高校俱乐部主席招募!

Data warehouse - what is OLAP

The project file '' has been renamed or is no longer in the solution, and the source control provider associated with the solution could not be found - two engineering problems

Imx6ull QEMU bare metal tutorial 2: usdhc SD card

How do ordinary college students get offers from big factories? Ao Bing teaches you one move to win!
51 single chip microcomputer stepping motor control system based on LabVIEW upper computer (upper computer code + lower computer source code + ad schematic + 51 complete development environment)

MySQL —— 16、索引的数据结构
随机推荐
mui + hbuilder + h5api模拟弹出支付样式
Temperature and humidity monitoring + timing alarm system based on 51 single chip microcomputer (C51 source code)
AUTOSAR from introduction to mastery 100 lectures (81) - FIM of AUTOSAR Foundation
GIS practical tips (III) - how to add legend in CASS?
EMMC / SD learning notes
MySQL basic statement query
The filter() traverses the array, which is extremely friendly
ECDSA signature verification principle and C language implementation
[untitled] make a 0-99 counter, P1 7 connected to key, P2 connected to nixie tube section, common anode nixie tube, P3 0,P3. 1. Connect the nixie tube bit code. Each time you press the key, the nixie
Stack protector under armcc / GCC
5 tricky activity life cycle interview questions. After learning, go and hang the interviewer!
decast id.var measure. Var data splitting and merging
Async void caused the program to crash
4.22 study record (you only did water problems in one day, didn't you)
According to the salary statistics of programmers in June 2021, the average salary is 15052 yuan. Are you holding back?
(personal) sorting out system vulnerabilities after recent project development
"Play with Lighthouse" lightweight application server self built DNS resolution server
MySQL 8.0.11 download, install and connect tutorials using visualization tools
STM32 tracking based on open MV
hbuilderx + uniapp 打包ipa提交App store踩坑记