当前位置:网站首页>Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
2022-08-11 05:23:00 【zhSunw】
Joint 3D Instance Segmentation and Object Detection for Autonomous Driving
简单介绍~~
框架PointNet++作为backbone.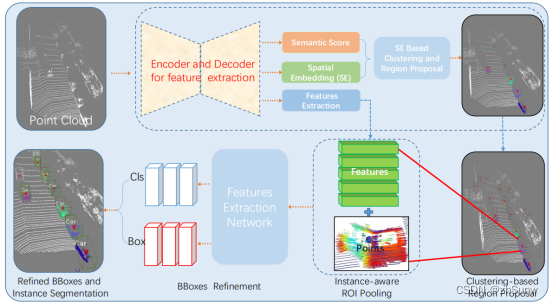
- Backbone提取特征之后为每个点分割语义(FG/BG)信息并预测BBox(offset,dim,θ)的信息。
- 对前景点进行偏移、聚类,将每一类的点分配ID作为一个实例并对每个实例用前5个预测的信息平均得到BBox。
- 实例感知的RoI轮询:将不在BBox内的但是拥有对应ID的前景点也用于Refinement;将在BBox内但是没有拥有对应ID的前景点删除。(即Refinement中对每一个object proposal考虑的是实例的点而不是Box内的点。)
边栏推荐
猜你喜欢

随机推荐
Laravel5.7反序列化
云计算学习笔记——第三章 计算虚拟化[一]
工具窗口永远置顶
2021-05-10
实例分析MySQL四种隔离级别的区别
GBase 8s分片技术介绍
ES6 迭代器与生成器
IDEA本机连接远程TDengine不成功,终于配置成功
order by注入,limit注入,宽字节注入
经纬度距离
azkaban集群部署
Haproxy集群
关于电脑电源选项,开合盖设置
lvs的keepalived
创建虚拟dom
ES6 模块化
GBASE数据库迁移(Oracle到GBase 8s的数据类型映射)
【OAuth2】授权机制
关于修改挂载到宿主机上的mysql配置文件不生效这件事
Mysql导入UTF8编码数据库命令总结