当前位置:网站首页>Matlab calibration board corner detection principle
Matlab calibration board corner detection principle
2022-04-23 06:37:00 【mightbxg】
Corner detection is camera calibration ( Chessboard ) A very important link in , Many people think that Matlab Calibrate the camera ratio OpenCV A more stable , One of the main reasons is its corner detection method . So , I read. Matlab Corner detection related source code ( Can be in “ The installation path /toolbox/vision/vision/+vision/+internal/+calibration/+checkerboard” Found in folder ), Roughly summarize its principle .
Algorithm flow
No matter what corner detection method (FAST,GFTT,…), There is a similar process :
- Corner response calculation : That is to calculate the of each pixel “ score ”, To evaluate the possibility that it is a corner
- Non maximum suppression : In a local context , Find the corner, and the point with the largest response is recorded as corner , Other points are eliminated
- Corner subpixelization ( Optional ): The first 2 The corner coordinates obtained in step are integer , For application scenarios with high accuracy ( Like camera calibration ), We need to find its sub-pixel coordinates further
Among them the first 2、3 The steps are almost the same , The non maxima is suppressed at Matlab In the corresponding find_peaks function , By calling imregionalmax Function implementation , In fact, it depends on whether the corner response of a point exceeds a specific threshold , And is the maximum value in the neighborhood , Pixels that meet these two conditions at the same time are judged as corner points . The sub-pixel corner is basically based on the neighborhood gradient voting method , Corresponding to OpenCV in cornerSubPix function .
therefore , The main factors affecting the stability of corner detection are 1 Step : Calculation of corner response .
Corner response
Matlab Use in secondDerivCornerMetric Function to calculate the corner response of each pixel , Source code :
function [cxy, c45, Ix, Iy, Ixy, I_45_45] = secondDerivCornerMetric(I, sigma)
%#codegen
% Low-pass filter the image
% Gaussian filtering is used to suppress noise
G = fspecial('gaussian', coder.const(round(sigma * 7)+1), sigma);
Ig = imfilter(I, G, 'conv');
% One dimensional convolution kernel
derivFilter = [-1 0 1];
% first derivatives
% To image x and y The directions are convoluted separately , Calculate a step
Iy = imfilter(Ig, derivFilter', 'conv');
Ix = imfilter(Ig, derivFilter, 'conv');
% define steerable filter constants
% Precomputing ±45° In two directions sin/cos, As a weight for subsequent use
cosPi4 = coder.const(cast(cos(pi/4), 'like', I));
cosNegPi4 = coder.const(cast(cos(-pi/4), 'like', I));
sinPi4 = coder.const(cast(sin(pi/4), 'like', I));
sinNegPi4 = coder.const(cast(sin(-pi/4), 'like', I));
% first derivative at 45 degrees
% 45° One step in the direction
I_45 = Ix * cosPi4 + Iy * sinPi4;
I_n45 = Ix * cosNegPi4 + Iy * sinNegPi4;
% second derivative Two steps
% xy Two steps in direction
Ixy = imfilter(Ix, derivFilter', 'conv');
I_45_x = imfilter(I_45, derivFilter, 'conv');
I_45_y = imfilter(I_45, derivFilter', 'conv');
% 45° Two steps in direction
I_45_45 = I_45_x * cosNegPi4 + I_45_y * sinNegPi4;
% suppress the outer corners
% xy Corner response in direction
cxy = sigma^2 * abs(Ixy) - 1.5 * sigma * (abs(I_45) + abs(I_n45));
cxy(cxy < 0) = 0;
% 45° Corner response in direction
c45 = sigma^2 * abs(I_45_45) - 1.5 * sigma * (abs(Ix) + abs(Iy));
c45(c45 < 0) = 0;
Although the theoretical explanation of this code is not found , But the idea is still relatively easy to understand . such as cxy The value of the xy The second step of the direction increases with the increase of , With 45° The direction decreases with the increase of step degree , So if a pixel is “ Ten ” Glyph corner , It's in cxy You will get a larger response value . Empathy ,c45 Able to respond “X” The response value of the corner .
The above code uses C++ be based on OpenCV Realization :
void secondDerivCornerMetric(const cv::Mat& I, cv::Mat& cxy, cv::Mat& c45,
cv::Mat& Ix, cv::Mat& Iy, cv::Mat& Ixy, cv::Mat& I_45_45)
{
using Scalar = double;
constexpr int DEPTH = cv::DataType<Scalar>::depth;
auto sigma = Scalar(2.0);
// Low-pass filter the image
cv::Mat Ig;
{
cv::Mat _I;
I.convertTo(_I, DEPTH);
int d = (cvRound(sigma * 7) + 1) | 1;
GaussianBlur(_I, Ig, cv::Size(d, d), sigma);
}
// first derivatives
const cv::Matx13d derivFilter(1, 0, -1);
filter2D(Ig, Ix, DEPTH, derivFilter);
filter2D(Ig, Iy, DEPTH, derivFilter.t());
// define steerable filter constants
constexpr float cosPi4 = 0.707106781186548; // cos(pi/4)
constexpr float cosNegPi4 = cosPi4;
constexpr float sinPi4 = cosPi4;
constexpr float sinNegPi4 = -cosPi4;
// first derivative at 45 degrees
cv::Mat I_45 = Ix * cosPi4 + Iy * sinPi4;
cv::Mat I_n45 = Ix * cosNegPi4 + Iy * sinNegPi4;
// second derivative
filter2D(Ix, Ixy, DEPTH, derivFilter.t());
cv::Mat I_45_x, I_45_y;
filter2D(I_45, I_45_x, DEPTH, derivFilter);
filter2D(I_45, I_45_y, DEPTH, derivFilter.t());
I_45_45 = I_45_x * cosNegPi4 + I_45_y * sinNegPi4;
// suppress the outer corners
auto removeNegative = [](auto& pix, const int*) {
if( pix < 0 ) pix = 0; };
cxy = sigma * sigma * abs(Ixy) - 1.5 * sigma * (abs(I_45) + abs(I_n45));
cxy.forEach<Scalar>(removeNegative);
c45 = sigma * sigma * abs(I_45_45) - 1.5 * sigma * (abs(Ix) + abs(Iy));
c45.forEach<Scalar>(removeNegative);
}
Since the direction of corners in the same calibration image is consistent ,Matlab Based on cxy and c45 Go through the process of corner extraction and finding the calibration board , And calculate the energy of the calibration plate ( The search results of reaction calibration board are good or bad ), Select the detection result with large energy as the final output result .
版权声明
本文为[mightbxg]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230546583621.html
边栏推荐
猜你喜欢

![[ThreadX] h743zi + lan8720 + ThreadX + netx duo transplantation](/img/3f/fac6afb904f4e1c3d60cb7dbbe1cec)




随机推荐
静态成员
[untitled]
【UDS统一诊断服务】(补充)五、ECU bootloader开发要点详解 (2)
Call procedure of function
多线程爬取马可波罗网供应商数据
【UDS统一诊断服务】二、网络层协议(1)— 网络层概述与功能
安装pyshp库
Cross domain issues - allow origin header contains multiple values but only one is allowed
C语言循环结构程序
The onnx model of yolov5 removes the transfer layer
Jeu de devinettes
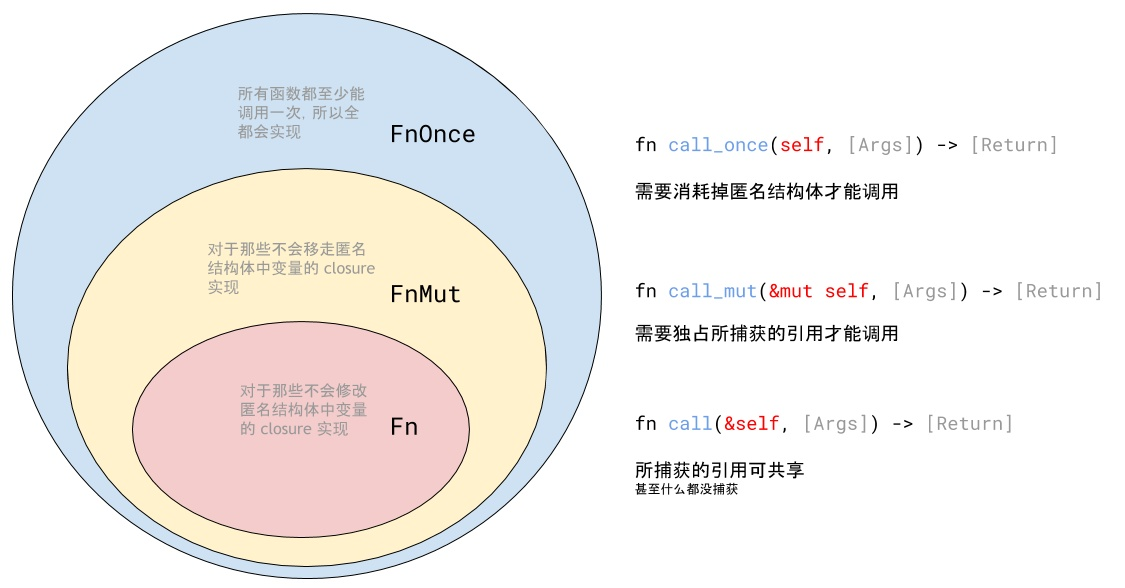
Rust的闭包类型(Fn, FnMut, FnOne的区别)
Cf1427c the hard work of paparazzi
代理服务器
爬虫效率提升方法
Programmers can also write novels
Cf6d lizards and fundamentals 2 problem solving
Rust 的 Box指针
小区房价可视化
Dynamic creation and release, assignment and replication of objects