当前位置:网站首页>关于舵机的漂移与不听指挥乱动的问题
关于舵机的漂移与不听指挥乱动的问题
2022-08-09 13:22:00 【C V工程狮】
在电赛E题中控制二维云台中出现了两个问题,也是好不容易才发现原因然后解决的
一.舵机不听指挥乱动
没有与单片机共地
舵机有三条线,分别是正负极和信号线(用来输入PWM信号),因为舵机所需要的驱动电压比较大,一般在6v往上了,一般的单片机供电无法驱动舵机,就需要单独的外接电源供电,这时注意舵机地线不仅要和外接电源负极相连,还要与单片机共地,不然PWM信号输入后舵机会不听使唤乱动,因为PWM信号由单片机输入,舵机与单片机没有供地,舵机就没有参考电平,就会乱转。
二.舵机大角度转动时发生漂移
输入电流不够
因为现在我手里头没拿舵机,所以无法演示,大概讲一下现象:比如现在舵机在0度,要转到180度,在转动这种大角度时,正常的舵机应该迅速作出反应转动到指定角度,但是不正常的舵机会很慢很慢的一点点一点点的开始转动,类似于那种mpu6050那种角度漂移(不是汽车那种漂移),然后在接近180度的时候再迅速做出反应转到180。造成这种情况的原因是舵机电流不够,我刚开始用的四节18650锂电池,电量刚开始都充足的到了16.5v左右,然后通过降压模块降压到6.5v来驱动舵机,这时没发现有什么异常,但是当用的时间长了以后电池的输入电压变成了13v,输出电压还是6.5v,这时舵机就一直在漂移,刚开始我并没有怀疑时电流问题,直到换了两节电池,电压达到16v之后,漂移现象没有了,这时我才怀疑是电流不够了。
出现以上现象不一定是我说的原因,但是有我说的这些原因肯定会出现这些不正常现象。
边栏推荐
猜你喜欢



随机推荐
01_iTween_第一天--小球抛物线
蓝桥历届真题-既约分数
哈希表卡片
Code of Conduct for Firefighters
2个有序数组排序
DCT变换与反变换
机器学习web服务化实战:一次吐血的服务化之路 (转载非原创)
Full GC (Ergonomics)排查分析
Unity3d_API_Gyroscope 陀螺仪的接口
C#使用cersharp
pytest 之 fixture的调用
蓝桥历届真题-门牌制作
NC15 求二叉树的层序遍历
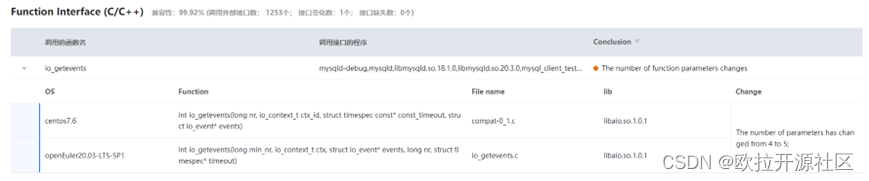
操作系统迁移实战之在openEuler上部署MySQL数据库
RobotFramework 之 RF变量与标准库关键字使用
对百度的内容进行修改
响应式pbootcms模板外贸灯具类网站
Unity3d_API_GPS_LocationService
远程控制软件-向日葵
iptables之SNAT与DNAT