当前位置:网站首页>【NeurIPS 2019】Self-Supervised Deep Learning on Point Clouds by Reconstructing Space
【NeurIPS 2019】Self-Supervised Deep Learning on Point Clouds by Reconstructing Space
2022-04-23 03:48:00 【I'll carry you】
List of articles
1. Four questions
1. What problem to solve
self-supervised learning task for deep learning on raw point cloud data
2. What method has been used to solve
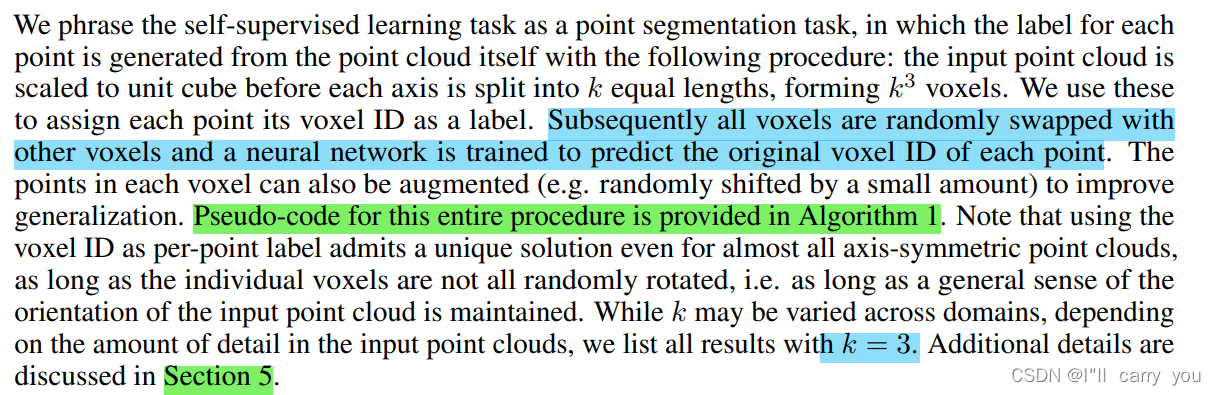
a neural network is trained to reconstruct point clouds whose parts have been randomly rearranged.While solving this task, representations that capture semantic properties of the point cloud are learned
agnostic of network architecture( It has nothing to do with the network architecture )
3. What's the effect
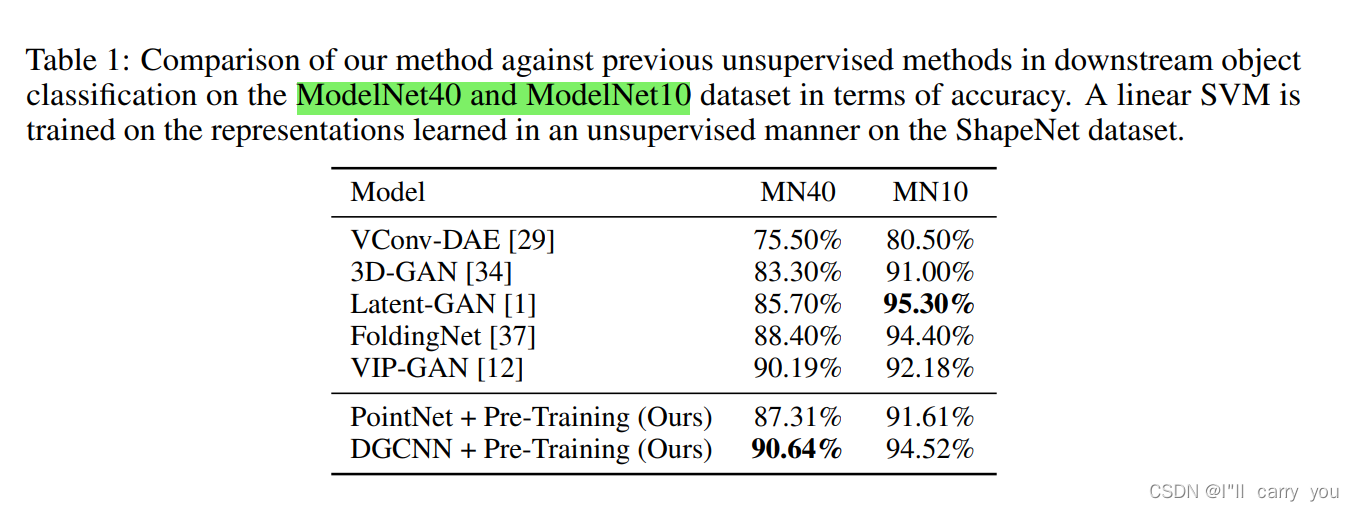
( I didn't understand this paragraph )A linear SVM is trained on the representations learned in an unsupervised manner on the ShapeNet dataset. ?


4. What are the problems
such Change the position at will and predict the original position Of Agent task , Really ?( however There seems to be less lattice ,3x3)
2. Paper introduction
While solving this task, representations that capture semantic properties of the point cloud are learned
architecture-agnostic( Not related to network architecture )
In this paper we propose a self-supervised method that learns powerful representations from raw point cloud data.
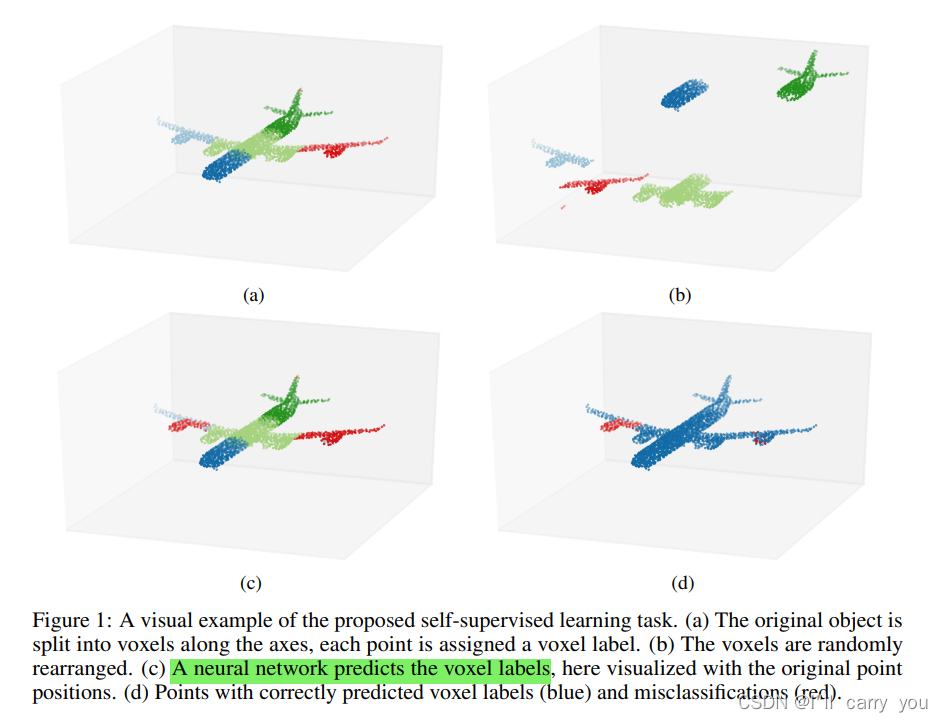
Our method works by training a neural network to reassemble point clouds whose parts have been randomly displaced.
The key assumption of the proposed method is that learning to reassemble displaced point cloud segments is only possible by learning holistic representations that capture the high-level semantics of the objects in the point cloud.( The key assumption of this method is , Only by learning to capture the overall representation of the high-level semantics of objects in the point cloud , To learn to reassemble the replaced point cloud segment .)
specific working means :
5 Discussion
In all the experiments , The representation learned by our proposed method is proved to be effective . It makes us believe that , For point clouds , image [7,21] As discussed in the image domain , The simple solution to rebuilding the input task is not a meaningful problem ( That is to say , The agent task cannot be too simple ? The task is more complicated , Can learn better results ?)
3. Reference material
4. Harvest
Auto-encoder And GAN What's the difference? ?
A new agent task : Upset The order (3x3), Predict the original location
5 Discussion
In all the experiments , The representation learned by our proposed method is proved to be effective . It makes us believe that , For point clouds , image [7,21] As discussed in the image domain , The simple solution to rebuilding the input task is not a meaningful problem ( That is to say , The agent task cannot be too simple ? The task is more complicated , Can learn better results ?)
版权声明
本文为[I'll carry you]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230347027663.html
边栏推荐
- The art of concurrent programming (2): synchronized usage scenarios
- Numpy's broadcasting mechanism (with examples)
- 2021-09-03 crawler template (only static pages are supported)
- mui. Plusready does not take effect
- ROS series (IV): ROS communication mechanism series (3): parameter server
- Installation and configuration of clion under win10
- Wechat applet cloud database value assignment to array error
- vscode删除卸载残余
- Nel ASA:挪威Herøya设施正式启用
- Using VBA interval to extract one column from another in Excel
猜你喜欢

将编译安装的mysql加入PATH环境变量

Process seven state transition diagram

作为一名码农,女友比自己更能码是一种什么体验?
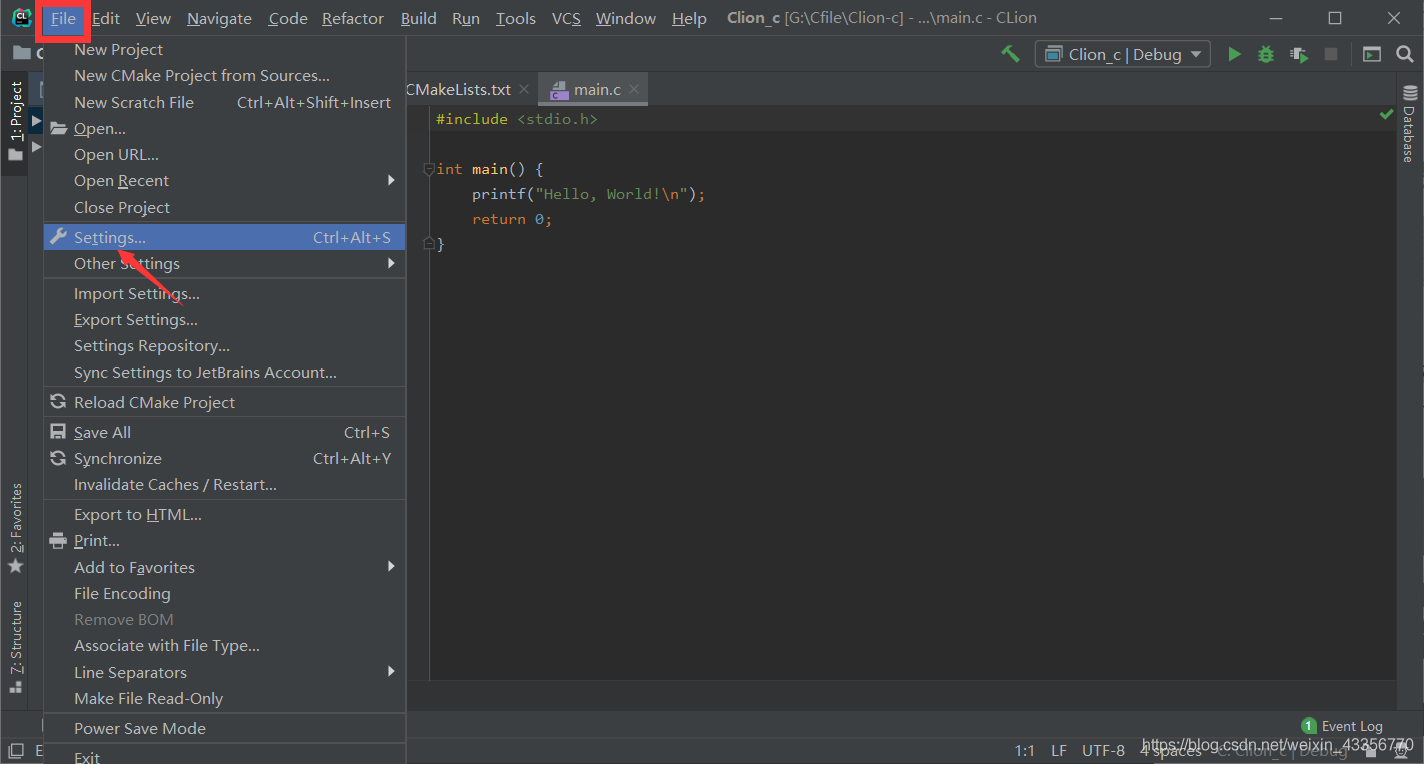
Installation and configuration of clion under win10
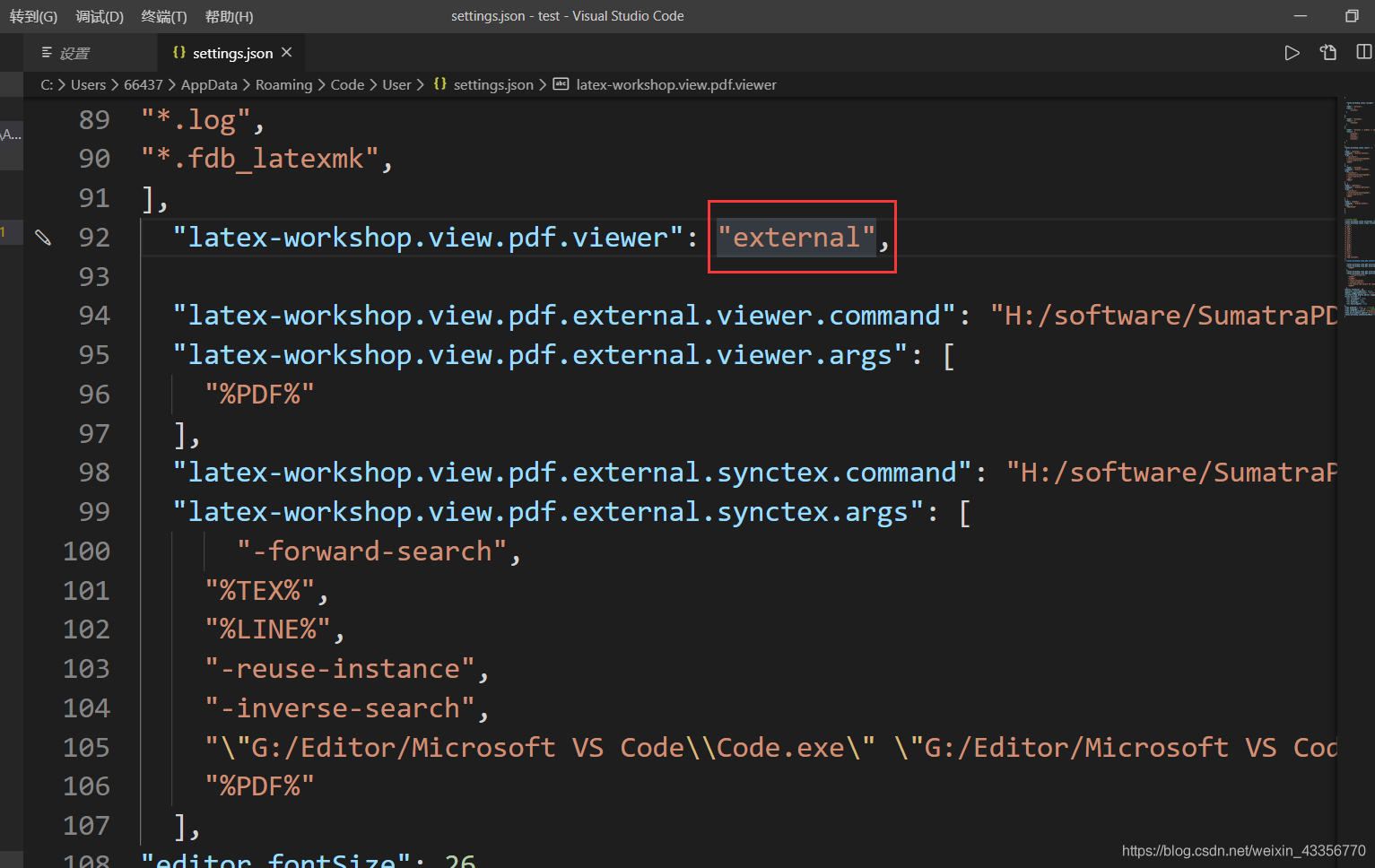
Writing latex with vscode - the latest tutorial 2022 / 4 / 17

Design and implementation of redis (4): what is the event driver of redis

秒杀所有区间相关问题

Paddlepaddle does not support arm64 architecture.

网络原理 | TCP/IP中的连接管理机制 重要协议与核心机制

Detailed explanation on the use of annotation tool via (VGg image annotator) in mask RCNN
随机推荐
Laboratory safety examination
Detailed explanation on the use of annotation tool via (VGg image annotator) in mask RCNN
Chapter VI, Section III pointer
抽象类、接口、常用关键字
The great gods in acmer like mathematics very much
对象和类的概念
Redis (17) -- redis cache related problem solving
51 single chip microcomputer: D / a digital to analog conversion experiment
Using VBA interval to extract one column from another in Excel
Three types of jump statements
Picture synthesis video
[AI vision · quick review of robot papers today, issue 30] Thu, 14 APR 2022
Variable definition and use
RuntimeError: output with shape [4, 1, 512, 512] doesn‘t match the broadcast shape[4, 4, 512, 512]
Retrieval question answering system baseline
Identifier, keyword, data type
伦敦银最新价格走势图与买卖点
Use of rotary selector wheelpicker
变量、常量、运算符
The art of concurrent programming (6): explain the principle of reentrantlock in detail