当前位置:网站首页>组合导航精度分析
组合导航精度分析
2022-08-10 20:24:00 【My.科研小菜鸡】
1.视觉惯性里程计精度分析
××MH01数据××
1.1轨迹图: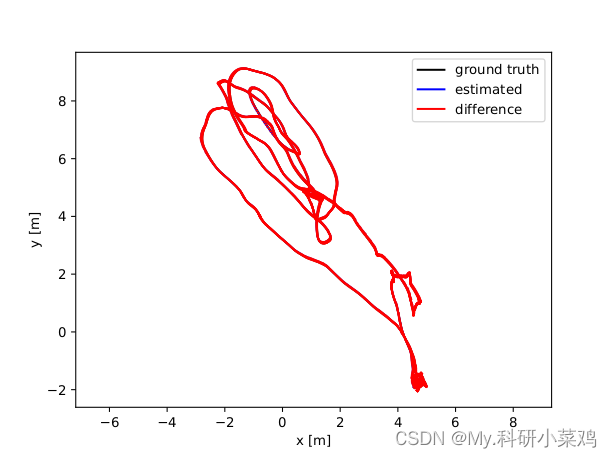
1.2EVO分析:
有一个问题是orbslam3的时间单位是ns,而evo默认是s,因此在sysytem.cc中1e9*(*lT)变成(*lT)
#1.将真值文件转换为tum格式
evo_traj euroc data.csv --save_as_tum
#2.画轨迹图,不建议使用
evo_traj tum sf_dataset-MH01_stereoi.txt --ref data.tum -p --plot_mode xyz -a --correct_scale
#3.建议直接评估绝对精度,map图包含轨迹和精度。
evo_ape tum data.tum sf_datet-MH01_stereoi.txt -p --plot_mode=xyz -a
在单目SLAM或者单目视觉里程计中自动校准尺度。TUM提供的工具需要手动输入。在命令后加--align --correct_scale
**1.2.1轨迹
1.2.2RMSE
2.evo美化:
默认字体不适合我们文章的其余部分,因为文章使用了衬线字体。 图形中文本标签的相对大小也可以增加,以提高可读性。 我们可以通过调用:
evo_config set plot_fontfamily serif plot_fontscale 1.2
为了匹配较小的字体,我们还缩小了行宽:
evo_config set plot_linewidth 1.0
Set the default figure size 3. 设置默认图形大小
You can adjust the default plot figure size, too. For example to a width of 5 and a height of 4.5:
您还可以调整默认的绘图图形大小。 例如,宽度为5,高度为4.5:
evo_config set plot_figsize 6.5 5
边栏推荐
- 怎么完全卸载赛门铁克_Symantec卸载方法,赛门铁克卸载「建议收藏」
- spark学习笔记(九)——sparkSQL核心编程-DataFrame/DataSet/DF、DS、RDD三者之间的转换关系
- 【毕业设计】基于STM32的天气预报盒子 - 嵌入式 单片机 物联网
- 电信保温杯笔记——《统计学习方法(第二版)——李航》第17章 潜在语义分析
- 优雅退出在Golang中的实现
- The 2021 ICPC Asia Shanghai Regional Programming Contest D、E
- argparse——命令行参数解析
- Kyligence 通过 SOC 2 Type II 审计,以可信赖的企业级产品服务全球客户
- The servlet mapping path matching resolution
- Public Key Retrieval is not allowed(不允许公钥检索)【解决办法】
猜你喜欢
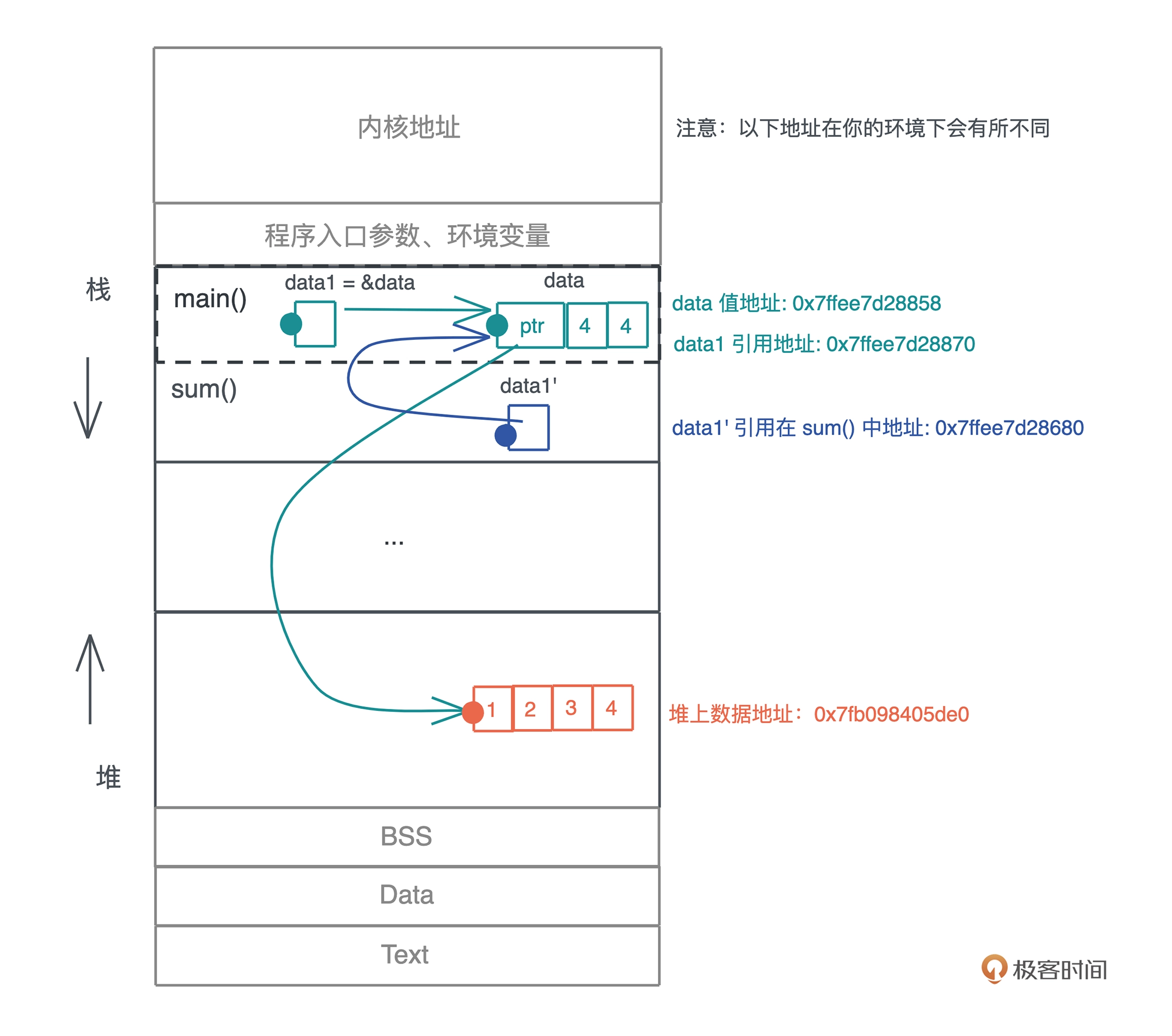
每日一R「03」Borrow 语义与引用
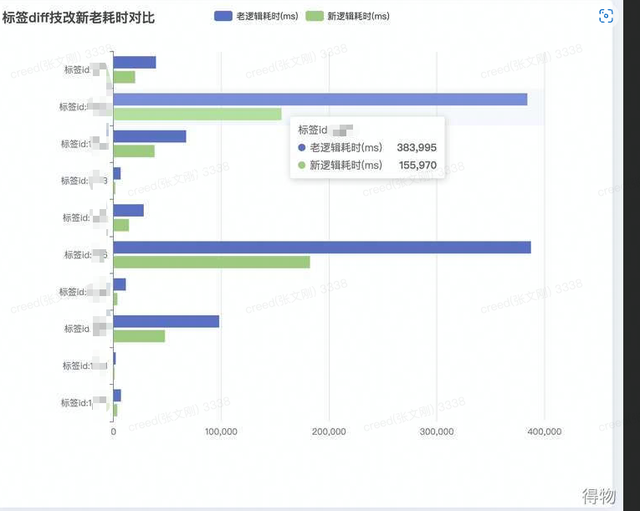
巧用RoaringBitMap处理海量数据内存diff问题
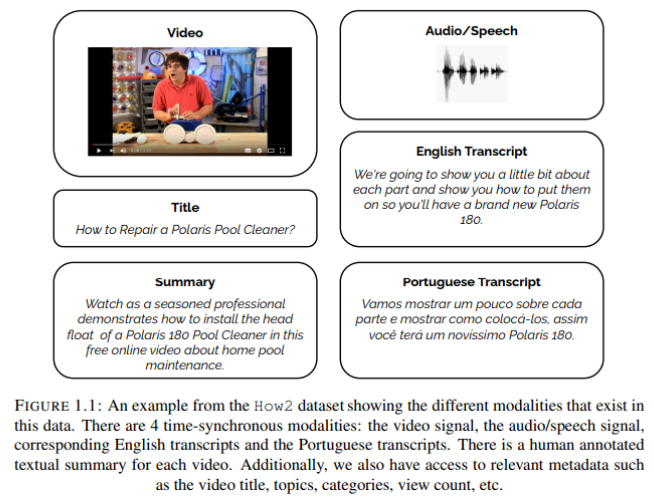
CMU博士论文 | 视频多模态学习:探索模型和任务复杂性
Knowledge map Knowledge Graph
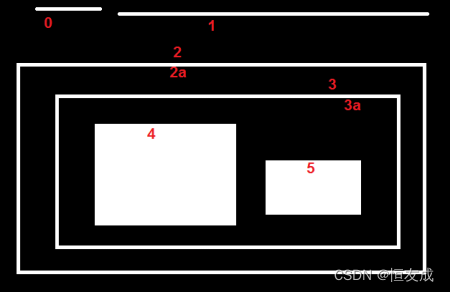
(12) findContours function hierarchy explanation
 [email prot"/>
[email prot"/>Transferrin-modified osthole long-circulating liposomes/PEG-PLGA nanoparticles loaded with notoginsenoside R1 ([email prot
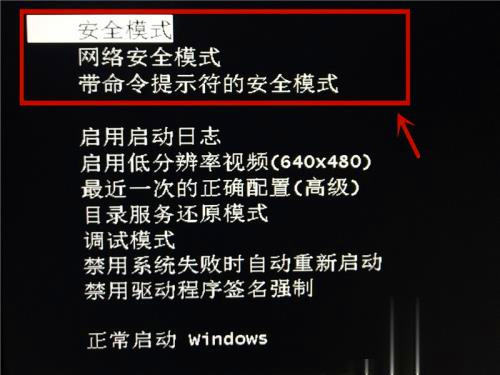
win7开机有画面进系统黑屏怎么办
机器学习模型验证:被低估的重要一环
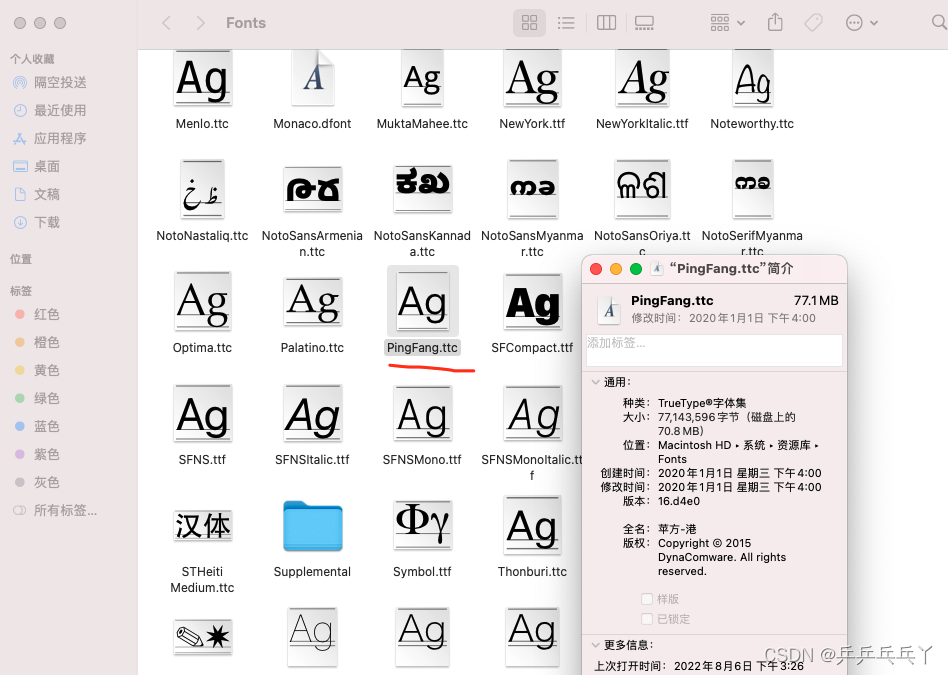
苹果字体查找
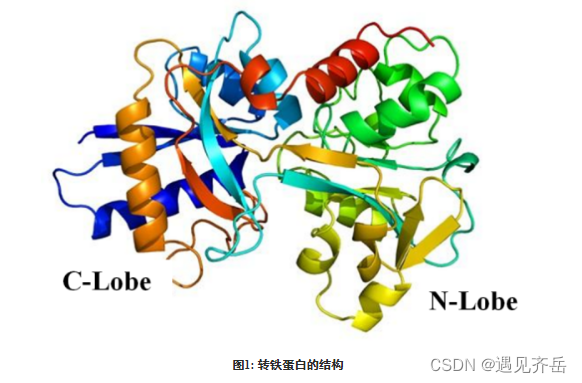
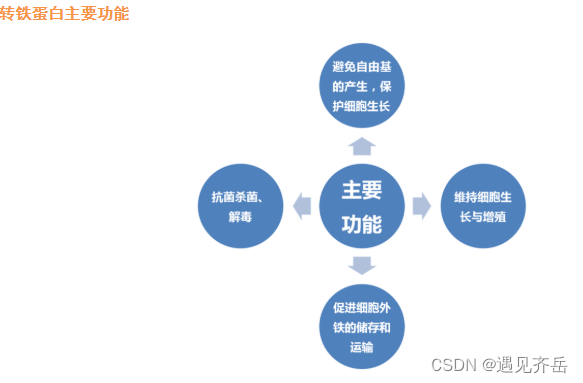
转铁蛋白Tf功能化β-榄香烯-雷公藤红素/紫杉醇PLGA纳米粒/雷公藤甲素脂质体(化学试剂)
随机推荐
力扣18-四数之和——双指针法
echart 特例-多分组X轴
【毕业设计】基于STM32的天气预报盒子 - 嵌入式 单片机 物联网
Transferrin-modified osthole long-circulating liposomes/PEG-PLGA nanoparticles loaded with notoginsenoside R1 ([email prot
C语言详解系列——关于调试那些事
双 TL431 级联振荡器
【CNN】刷SOTA的trick
设备管理中数据聚类处理
金鱼哥RHCA回忆录:CL210OpenStack操作的故障排除--章节实验
(十)图像数据的序列与反序列化
[CNN] Brush SOTA's trick
Colocate Join :ClickHouse的一种高性能分布式join查询模型
keepalived:故障检测自动修复脚本
[SemiDrive source code analysis] [MailBox inter-core communication] 51 - DCF_IPCC_Property implementation principle analysis and code combat
洛谷 P1629 邮递员送信 (三种最短路)
优雅退出在Golang中的实现
MySQL数据库的主从复制部署详解
TDD、FDD是什么意思?
svg+元素js实现在图片上描点成框,并获取相对图片的坐标位置
“2022零信任神兽方阵”启动调研,欢迎各单位填报信息