当前位置:网站首页>机器人控制器编程实践指导书旧版-实践四 步进电机(执行器)
机器人控制器编程实践指导书旧版-实践四 步进电机(执行器)
2022-08-10 17:28:00 【zhangrelay】
适用于UNO/2560/DUE/ESP8266/ESP32,2021年之前使用版本。

4.1 实践目的
- 掌握Arduino[ESP32]对步进电机控制的软硬件测试。
4.2 实践设备
- PC机一台
- Arduino[ESP32]开发板及配件等
- 万用表和示波器等
4.3 实践原理
- 初级:无
- 中级:步进电机调速。
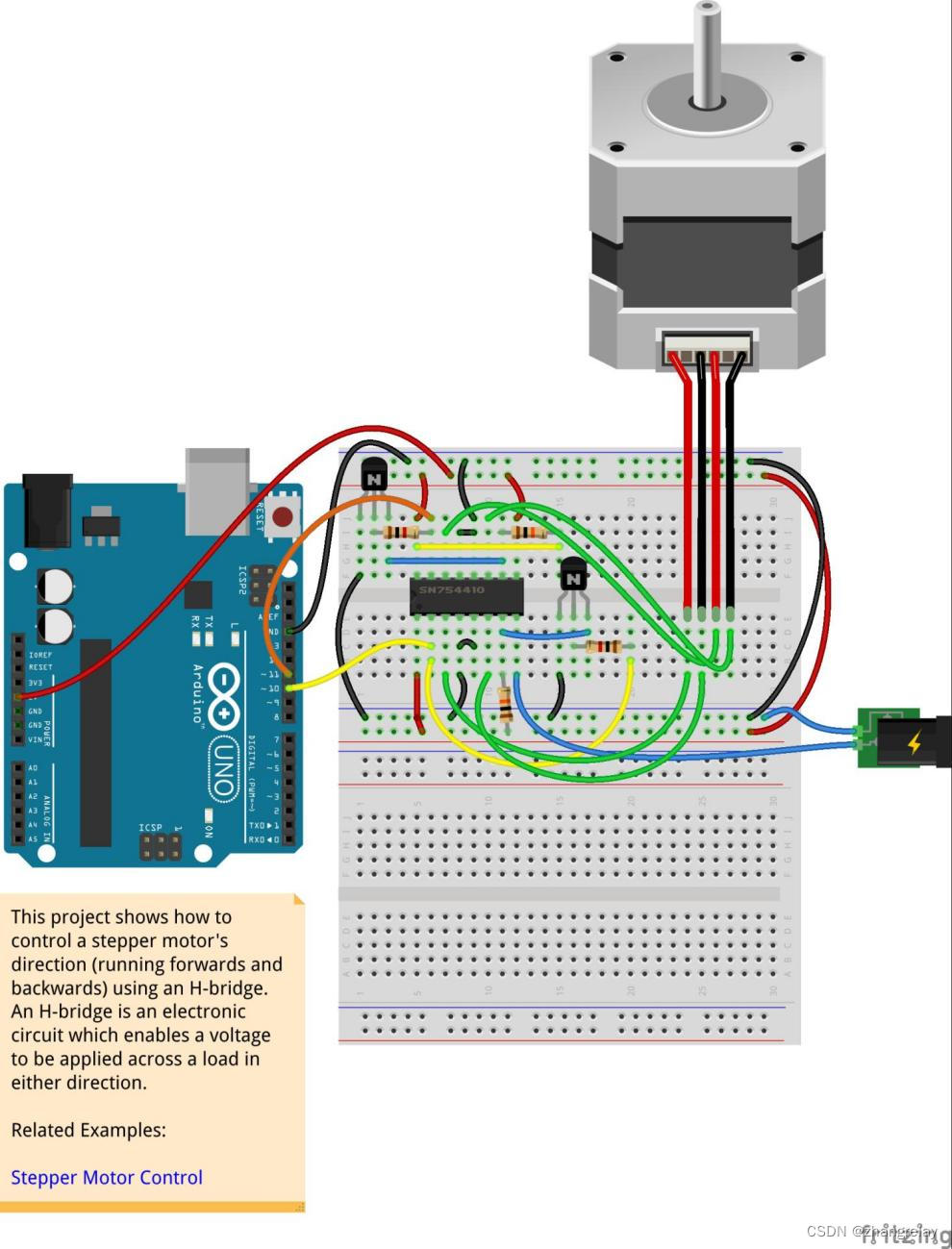
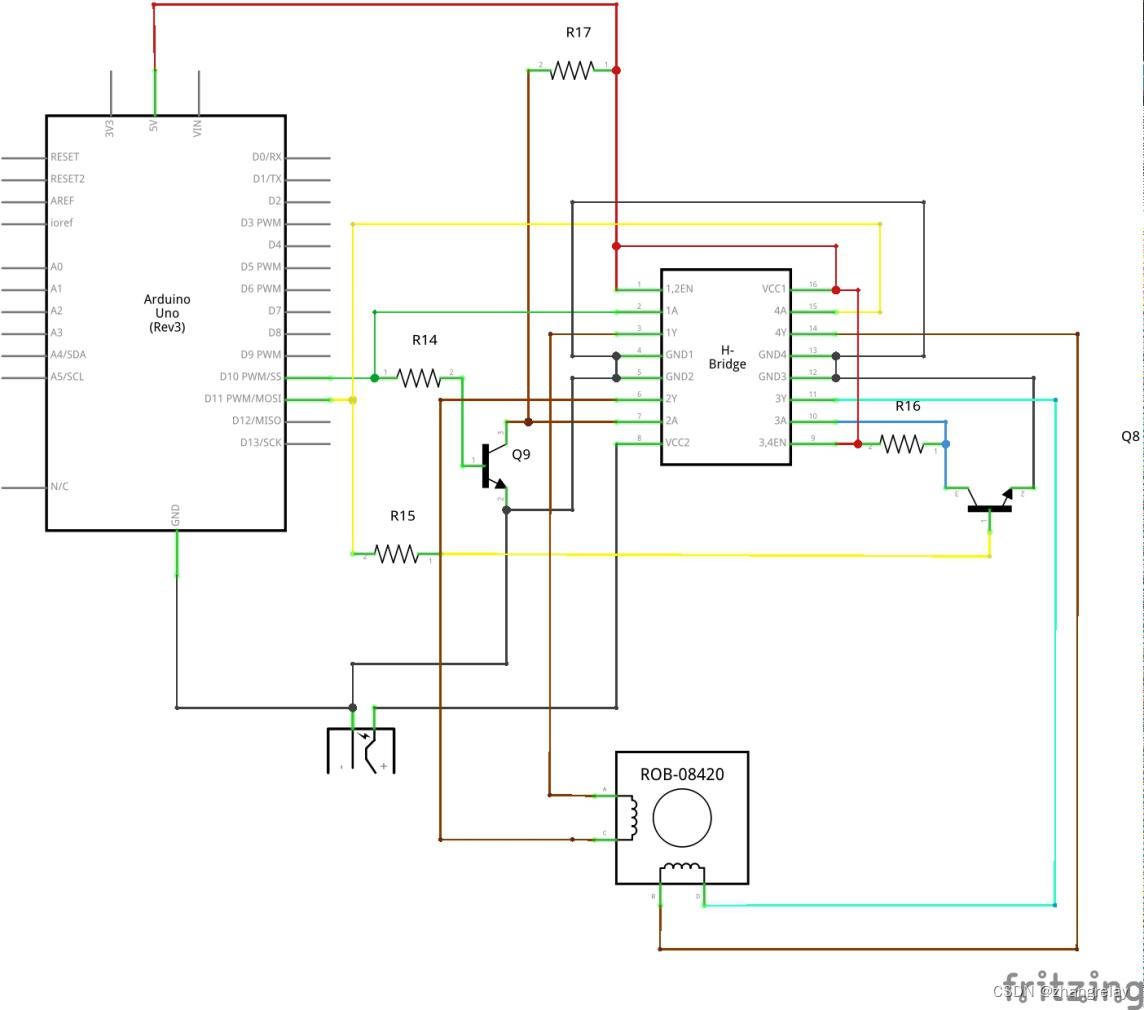
原理图
示意图
- 高级(ROS选修):
使用电脑键盘按键控制步进电机转速。
4.4 实践内容
阅读4.3中示意图、原理图和代码,在Arduino[ESP32]平台上完成实践。
4.5 实践问题
4.5.1 步进电机转速如何调节?
改变极对数变数
变频调速
换向器电机调速
串子调速
定子调压调速
电磁转离合器调速
转子串电阻调速
4.5.2 步进电机转速如何精确控制?
可以采用专用的步进电机驱动器。电脑只需向驱动器输出两个信号:脉冲和调向信号。脉冲信号的频率控制步进电机的转速,脉冲的个数控制步进电机的转角;调向信号控制步进电机的转向。
步进电机只能够由数字信号控制运行的,当脉冲提供给驱动器时,在过于短的时间里,控制系统发出的脉冲数太多,也就是脉冲频率过高,将导致步进电机堵转。要解决这个问题,必须采用加减速的办法。就是说,在步进电机起步时,要给逐渐升高的脉冲频率,减速时的脉冲频率需要逐渐减低。所以步进电机在高速启动时,需要采用脉冲频率升速的方法,在停止时也要有降速过程,以保证实现步进电机精密定位控制。
4.6 实践总结
回顾本次实践,遇到哪些问题,如何解决,经验和启发有哪些?
使用ESP32 驱动步进电机
void setup() {
//设置转速
myStepper.setSpeed(120);
Serial.begin(115200);
}
void loop() {
Serial.printf("顺时针");
myStepper.step(2048);
delay(500);
Serial.printf("逆时针");
myStepper.step(-1024);//倒转半圈
delay(500);
}
评分:
|
边栏推荐
- Selenium - 如何使用隐式、显示、强制元素等待?
- R语言创建列表数据(list):根据名称索引列表元素、双方括号访问单个元素、单方括号访问子列表
- perl编码转换
- 程序员兼职踩到的坑,本人亲身经历
- JNDI与RMI、LDAP
- leetcode:159.最多有两个不同字符的最长子串
- 神经网络的图像识别技术,神经网络识别图像原理
- R语言拟合ARIMA模型:使用forecast包中的auto.arima函数自动搜索最佳参数组合、模型阶数(p,d,q)、如果已知阶数则直接使用arima函数构建模型(order参数指定阶数)
- bp神经网络反向传播原理,BP神经网络反向传播
- mysql主主复制+keepalived高可用
猜你喜欢




随机推荐
Oracle Install [email protected] 7.6
Splitting and merging long markdown documents
mysql定义存储过程
重庆新壹汽与一汽集团达成新能源项目战略合作,赋能“碳中和”创造“碳财富”
华为云连续5年保持中国政务云基础设施市场份额第一…
奥迪的极致高端属于一个大写的H?重塑时空,谁会是这个夜晚的主角?
建筑施工员证怎么考?报名条件及报考时间是什么?
skywalking vulnerability learning
函数柯里化(curry)
期货开户手续费加1分已经是常态
Redis下载安装教程 (windows)
百度、四维图新、高德争“鲜”恐后
vvic API 接入说明
shopee API 接入说明
多线程与高并发(11)——经典面试题之实现一个容器,提供两个方法,add,size。
HDLBits: 在线学习 SystemVerilog(零)-在线“巡礼” HDLBits
pip安装时 fatal error C1083 无法打开包括文件 “io.h” No such file or directory
mysql包select结果无法同步的问题
Go-Excelize API源码阅读(六)—— DeleteSheet(sheet string)
为什么某互联网企业开200w年薪大家都支持,但是中金开100w年薪大家都在骂?...