当前位置:网站首页>camera preview process --- from HAL to OEM
camera preview process --- from HAL to OEM
2022-08-10 21:52:00 【Caroline_cheng】
文章目录
- Send a preview request
- 1,SprdCamera3HWI:channel->request
- 2,SprdCamera3RegularChannel::request
- 3,SprdCamera3Stream::buffDoneQ
- 4,SprdCamera3OEMIf::queueBuffer
- 5,SprdCamera3Stream::getQBufInfoForHandle
- 6,mHalOem->ops->queue_buffer
- 7,SprdOEMCamera::queue_buffer
- 8,cmr_oem::local_queue_buffer
- 9,cmr_preview::cmr_preview_set_preview_buffer
- 10,cmr_preview::prev_set_preview_buffer
- Process preview frames据
- 1,cmr_grab::cmr_grab_thread_proc
- 2,cmr_oem::camera_grab_evt_cb
- 3,cmr_oem::camera_send_channel_data
- 4,cmr_preview::cmr_preview_receive_data
- 5,cmr_preview::prev_preview_frame_handle
- 6,cmr_preview::prev_construct_frame
- 7,cmr_preview::prev_pop_preview_buffer
- 8,回调 步骤6 中填充的数据
- 9,cmr_oem处理回调
- 10,SprdCamera3OEMIf::camera_cb
- 11,SprdCamera3OEMIf::receivePreviewFrame
- 12,SprdCamera3OEMIf::PreviewFramePreviewStream
- 13,SprdCamera3RegularChannel::channelCbRoutine (buffDoneDQ)
- log 跟踪
We have mainly introduced them separately in the previous articleshal和oemsome key belowc/cpp文件的内容,比较分散.Because the whole preview process involves too much content,It is not easy for us to make it clear in one article,Only a single point of knowledge can be explained one by one,Then the entire preview process can be chained together.
注:Everyone before reading this,Please introduce me first Hal3_2v6 和 OEM content is over.
Send a preview request
I covered it in the previous articleSprdCamera3HWI.cpp ,One of its three key processes processCaptureRequest,That is, the preview request is sent,我们就从这里开始.
1,SprdCamera3HWI:channel->request
for (i = 0; i < request->num_output_buffers; i++) {
const camera3_stream_buffer_t &output = request->output_buffers[i];
camera3_stream_t *stream = output.stream;
SprdCamera3Channel *channel = (SprdCamera3Channel *)stream->priv;
ret = channel->request(stream, output.buffer, frameNumber);
}
2,SprdCamera3RegularChannel::request
我们知道,channel有两类:预览和拍照.分别对应 SprdCamera3RegularChannel 和 SprdCamera3PicChannel (There is one more responsible for processingmetadata的 SprdCamera3MetadataChannel).
We analyze the preview process in this article,那channel走的就是 SprdCamera3RegularChannel,其request的内容不多,We posted it all.
int SprdCamera3RegularChannel::request(camera3_stream_t *stream,
buffer_handle_t *buffer,
uint32_t frameNumber) {
HAL_LOGD("SprdCamera3RegularChannel request frameNumber:%d", frameNumber);
int ret = NO_ERROR;
int i;
char multicameramode[PROPERTY_VALUE_MAX];
for (i = 0; i < CHANNEL_MAX_STREAM_NUM; i++) {
if (mCamera3Stream[i]) {
camera3_stream_t *new_stream;
mCamera3Stream[i]->getStreamInfo(&new_stream);
if (new_stream == stream) {
ret = mCamera3Stream[i]->buffDoneQ(frameNumber, buffer);
if (ret != NO_ERROR) {
return ret;
}
if (i == 0) {
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_PREVIEW);
} else if (i == (CAMERA_STREAM_TYPE_VIDEO -
REGULAR_STREAM_TYPE_BASE)) {
if (mOEMIf->isVideoCopyFromPreview()) {
HAL_LOGD("video stream copy preview stream");
} else {
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_VIDEO);
}
} else if (i == (CAMERA_STREAM_TYPE_CALLBACK -
REGULAR_STREAM_TYPE_BASE))
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_CALLBACK);
else if (i ==
(CAMERA_STREAM_TYPE_YUV2 - REGULAR_STREAM_TYPE_BASE))
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_YUV2);
break;
}
}
}
return ret;
}
channel的requestThe process is mainly divided into the following two steps:
- SprdCamera3Stream::buffDoneQ
- SprdCamera3OEMIf::queueBuffer
3,SprdCamera3Stream::buffDoneQ
cam3Stream的buffDoneQ主要是调用 SprdCamera3GrallocMemory 的map,将入参 buffer_handle_t *buffer_handle 传入GraphicBufferMapper 的 lock 中,获取虚拟地址 addr_vir.
//SprdCamera3Stream
int SprdCamera3Stream::buffDoneQ(uint32_t frameNumber,buffer_handle_t *buffer) {
}
hal_buff_list_t *buff_hal = new hal_buff_list_t;
hal_mem_info_t *buf_mem_info = &(buff_hal->mem_info);
mMemory->map(buffer, buf_mem_info);
//SprdCamera3GrallocMemory
int SprdCamera3GrallocMemory::map(buffer_handle_t *buffer_handle,hal_mem_info_t *mem_info){
}
GraphicBufferMapper &mapper = GraphicBufferMapper::get();
ret = mapper.lock((const native_handle_t *)*buffer_handle, usage,bounds, &vaddr);
mem_info->addr_vir = vaddr;
通过SprdCamera3GrallocMemory 的 map之后,拿到了 addr_vir 保存在 cam3Stream的buff_hal下的hal_mem_info_t 中,然后
mBufferList.add(buff_hal);
我们看到cam3StreamThere are apparently symmetrical functions:
- buffDoneQ
- buffDoneQ2
- buffDoneDQ
- buffFirstDoneDQ
They are called separatelySprdCamera3GrallocMemory 中的map 与 unmap,即 GraphicBufferMapper 的 lock与 unlock.
| SprdCamera3Stream | SprdCamera3GrallocMemory | SprdCamera3Stream |
|---|---|---|
| buffDoneQ、buffDoneQ2 | map | mBufferList.add |
| buffDoneDQ、buffDoneDQ | unmap | mBufferList.erase |
SprdCamera3Stream中的mBufferList在maptime collectionadd、unmaptime collectionerase的数据.
总之,SprdCamera3Stream::buffDoneQ The main purpose is to obtain input parameters buffer_handle_t *buffer 的 addr_vir .
4,SprdCamera3OEMIf::queueBuffer
SprdCamera3OEMIf 的 queueBuffer中关于preivew的这条case 代码不多,We also post it directly.也分两步
- stream->getQBufInfoForHandle
- mHalOem->ops->queue_buffer
case CAMERA_STREAM_TYPE_PREVIEW:
channel = reinterpret_cast<SprdCamera3RegularChannel *>(mRegularChan);
if (channel == NULL) {
ret = -1;
HAL_LOGE("mRegularChan is null");
goto exit;
}
ret = channel->getStream(CAMERA_STREAM_TYPE_PREVIEW, &stream);
if (ret || stream == NULL) {
HAL_LOGE("getStream failed");
goto exit;
}
ret = stream->getQBufInfoForHandle(buff_handle, &buffer);
if (ret || buffer.addr_vir == NULL) {
HAL_LOGE("getQBufForHandle failed");
goto exit;
}
mHalOem->ops->queue_buffer(mCameraHandle, buffer,
SPRD_CAM_STREAM_PREVIEW);
break;
5,SprdCamera3Stream::getQBufInfoForHandle
我们在步骤3中介绍了SprdCamera3StreamA collection is managed mBufferList,Here is the input parameter in this set buffer_handle_t *buff来获取信息,并将信息封装到 cam_buffer_info_t 对象中,其中最重要的就是 addr_vir.
int SprdCamera3Stream::getQBufInfoForHandle(buffer_handle_t *buff,
cam_buffer_info_t *bufInfo) {
Mutex::Autolock l(mLock);
int ret = NO_ERROR;
Vector<hal_buff_list_t *>::iterator iter;
for (iter = mBufferList.begin(); iter != mBufferList.end(); iter++) {
if ((*iter) && (*iter)->buffer_handle == buff) {
bufInfo->fd = (*iter)->mem_info.fd;
bufInfo->size = (*iter)->mem_info.size;
bufInfo->addr_phy = (*iter)->mem_info.addr_phy;
bufInfo->addr_vir = (*iter)->mem_info.addr_vir;
bufInfo->width = (*iter)->mem_info.width;
bufInfo->height = (*iter)->mem_info.height;
bufInfo->format = (*iter)->mem_info.format;
bufInfo->frame_number = (*iter)->frame_number;
return ret;
}
}
return BAD_VALUE;
}
6,mHalOem->ops->queue_buffer
我们在SprdCamera3OEMIf中看到很多 mHalOem->ops 调用形式.我们来看下 mHalOem 的实例化,在SprdCamera3OEMIf的构造函数中:
if (!mHalOem) {
oem_module_t *omi;
mHalOem = (oem_module_t *)malloc(sizeof(oem_module_t));
if (NULL == mHalOem) {
HAL_LOGE("mHalOem is NULL");
} else {
memset(mHalOem, 0, sizeof(*mHalOem));
mHalOem->dso = dlopen(OEM_LIBRARY_PATH, RTLD_NOW);
if (NULL == mHalOem->dso) {
char const *err_str = dlerror();
HAL_LOGE("dlopen error%s ", err_str ? err_str : "unknown");
}
const char *sym = OEM_MODULE_INFO_SYM_AS_STR;//OMI
omi = (oem_module_t *)dlsym(mHalOem->dso, sym);
if (omi) {
mHalOem->ops = omi->ops;
}
HAL_LOGI("loaded libcamoem.so mHalOem->dso = %p", mHalOem->dso);
}
}
#define OEM_LIBRARY_PATH "libcamoem.so"
我们看到是open了一个 OEM_LIBRARY_PATH,即oem的库.在SprdOEMCamera中找到OEM_MODULE_INFO_SYM 的定义:
struct oem_module OEM_MODULE_INFO_SYM = {
.tag = 0, .ops = &oem_module_ops, .dso = NULL};
其中 ops = &oem_module_ops,即SprdOEMCameraAll operations defined in :
static oem_ops_t oem_module_ops = {
camera_init, camera_deinit, camera_release_frame, camera_set_param,
camera_start_preview, camera_stop_preview, camera_start_autofocus,
camera_cancel_autofocus, camera_cancel_takepicture,
// camera_safe_scale_th,
NULL, camera_take_picture, camera_get_sn_trim, camera_set_mem_func,
camera_get_redisplay_data, camera_is_change_size,
NULL, camera_get_preview_rect,
camera_get_zsl_capability, camera_get_sensor_info_for_raw,
camera_get_sensor_trim, camera_get_sensor_trim2,
camera_get_preview_rot_angle, camera_fd_enable, camera_flip_enable,
camera_fd_start, camera_is_need_stop_preview, camera_takepicture_process,
camera_get_size_align_page, camera_fast_ctrl, camera_start_preflash,
camera_get_viewangle, camera_get_sensor_exif_info,
camera_get_sensor_result_exif_info, camera_get_iommu_status,
camera_set_preview_buffer, camera_set_video_buffer, camera_set_zsl_buffer,
queue_buffer, camera_set_video_snapshot_buffer,
camera_set_zsl_snapshot_buffer, camera_zsl_snapshot_need_pause,
camera_get_isp_handle, camera_lls_enable, camera_is_lls_enabled,
camera_vendor_hdr_enable, camera_is_vendor_hdr, camera_set_lls_shot_mode,
camera_get_lls_shot_mode, camera_get_last_preflash_time,camera_get_isp_info, camera_start_burst_notice,
camera_end_burst_notice, NULL, NULL, dump_jpeg_file, camera_get_gain_thrs,
camera_set_sensor_info_to_af, camera_get_sensor_max_fps,
camera_snapshot_is_need_flash, camera_get_sensor_otp_info,
camera_get_sensor_vcm_step, camera_set_sensor_close_flag,
camera_set_reprocess_picture_size, camera_start_capture,
camera_stop_capture, camera_set_largest_picture_size, camera_set_alloc_picture_size,
camera_ioctrl,
camera_reprocess_yuv_for_jpeg, image_sw_algorithm_processing,
dump_image_with_isp_info,
#if defined(CONFIG_ISP_2_1)
camera_get_focus_point, camera_isp_sw_check_buf, camera_isp_sw_proc,
camera_raw_post_proc, camera_get_tuning_param,
#endif
#if defined(CONFIG_ISP_2_3) || defined(CONFIG_ISP_2_4) || \ defined(CONFIG_CAMERA_3DNR_CAPTURE_SW) || \ defined(CONFIG_CAMERA_SUPPORT_ULTRA_WIDE)
camera_set_gpu_mem_ops,
#endif
#ifdef CONFIG_CAMERA_MM_DVFS_SUPPORT
camera_set_mm_dvfs_policy,
#endif
camera_set_original_picture_size,
};
那么SprdCamera3OEMIf中调用的queue_buffer also wentSprdOEMCamera中了.
7,SprdOEMCamera::queue_buffer
cmr_s32 queue_buffer(cmr_handle camera_handle, cam_buffer_info_t buffer,
int steam_type) {
cmr_int ret = CMR_CAMERA_SUCCESS;
ret = local_queue_buffer(camera_handle, buffer, steam_type);
return ret;
}
8,cmr_oem::local_queue_buffer
cmr_oem中的实现,我们只截取previewrelated to this one:
cmr_s32 local_queue_buffer(cmr_handle oem_handle, cam_buffer_info_t buffer,
int steam_type) {
cmr_int ret = CMR_CAMERA_SUCCESS;
struct camera_context *cxt;
struct sensor_exp_info exp_info;
if (!oem_handle) {
CMR_LOGE("in parm error");
ret = -CMR_CAMERA_INVALID_PARAM;
goto exit;
}
cxt = (struct camera_context *)oem_handle;
switch (steam_type) {
case SPRD_CAM_STREAM_PREVIEW:
ret = cmr_preview_set_preview_buffer(cxt->prev_cxt.preview_handle,
cxt->camera_id, buffer);
if (ret) {
CMR_LOGE("cmr_preview_set_preview_buffer failed");
goto exit;
}
break;
9,cmr_preview::cmr_preview_set_preview_buffer
cmr_previewThe process we have also introduced in the previous article,我们看到 cmr_preview_set_preview_buffer 就是发送了一个message,The final processing flow is in prev_set_preview_buffer
10,cmr_preview::prev_set_preview_buffer
prev_set_preview_bufferThe process mainly includes two aspects:
- 是将入参 cam_buffer_info_t *buffer The data are placed as follows:
- prev_cxt->prev_fd_array[valid_num]
- prev_cxt->prev_phys_addr_array[valid_num]
- prev_cxt->prev_virt_addr_array[valid_num]
- prev_cxt->prev_frm[valid_num]
- 调用 handle->ops.channel_buff_cfg
channel_buff_cfg 是在cmr_preview.h中定义的结构体 struct preview_md_ops pointer function below,We can't see a concrete implementation,但是可以猜测 channel_buff_cfg Just to keep us there SprdCamera3Mem中map得到的 addr_vir The address is given to the lower layerDCAM,Used to load the preview data of the next frame.
到这里,我们从SprdCamera3HW中的 channel->request The chasing process is over.总结下,就是要将map到的 addr_vir Set to the bottom layer to load preview data.
The address where the data is loaded has gone down,Then we have to look at the processing flow of the data, Next, let's start chasing from where the frame data came from.
Process preview frames据
我们之前介绍cmr_grab,say it ishalThe terminal can get the beginning of the underlying frame data,我们就从cmr_grab中开始.
1,cmr_grab::cmr_grab_thread_proc
我们在介绍cmr_grab中说过,The frame data he gets is passedgrab_evt_cbcallback upwards.
(*p_grab->grab_evt_cb)(evt_id, &frame,(void *)p_grab->init_param.oem_handle);
The callback is just thatcmr_oem中的 camera_grab_evt_cb
2,cmr_oem::camera_grab_evt_cb
我们截取 cmr_grab_evt_reg Check out the key content,又调到了 camera_send_channel_data
cmr_grab_evt_reg(grab_handle, camera_grab_evt_cb);
void camera_grab_evt_cb(cmr_int evt, void *data, void *privdata) {
switch (evt) {
case CMR_GRAB_TX_DONE:
if (frame->is_4in1_frame && frame->fmt != CAM_IMG_FMT_BAYER_MIPI_RAW) {
camera_4in1_handle(evt, data, privdata);
}
camera_send_channel_data((cmr_handle)cxt, receiver_handle, evt, data);
3,cmr_oem::camera_send_channel_data
if (cxt->prev_cxt.preview_eb && cxt->prev_cxt.preview_channel_id == frm_ptr->channel_id) {
ret = cmr_preview_receive_data(cxt->prev_cxt.preview_handle,cxt->camera_id, evt, data);
}
The process goes to again cmr_preview中去了
4,cmr_preview::cmr_preview_receive_data
cmr_preivew.c中以cmr_ The functions at the beginning basically send onemessage,There is no logic in itself.其message的处理是prev_receive_data 函数,Further calls will be made prev_frame_handle.
cmr_preview_receive_data ==》 prev_receive_data ==》 prev_frame_handle ==》prev_preview_frame_handle
5,cmr_preview::prev_preview_frame_handle
prev_preview_frame_handleThe main logic is divided into three steps:
- prev_construct_frame
- prev_pop_preview_buffer
- 数据回调
6,cmr_preview::prev_construct_frame
prev_construct_frame 主要是根据入参struct frm_info *info找到 prev_cxt->prev_frm[]中对应的frm_id,Corresponding to this can be obtained prev_cxt->prev_frm[frm_id]数据,That is, the address information stored in the preview frame data uploaded this time.This data is used in two places:
- 填充到frame_type
- Sent to the algorithm of the preview run:包括 fd、3dnr、ai 等等
7,cmr_preview::prev_pop_preview_buffer
prev_pop_preview_buffer Mainly organize prev_cxt->prev_phys_addr_array[] 和 prev_cxt->prev_frm[]的内容,Advance the data by one,覆盖位置0处的数据.
for (i = 0; i < (cmr_u32)(valid_num - 1); i++) {
prev_cxt->prev_phys_addr_array[i] = prev_cxt->prev_phys_addr_array[i + 1];
prev_cxt->prev_virt_addr_array[i] = prev_cxt->prev_virt_addr_array[i + 1];
prev_cxt->prev_fd_array[i] = prev_cxt->prev_fd_array[i + 1];
memcpy(&prev_cxt->prev_frm[i], &prev_cxt->prev_frm[i + 1],sizeof(struct img_frm));
}
8,回调 步骤6 中填充的数据
cb_data_info.cb_type = PREVIEW_EVT_CB_FRAME;
cb_data_info.func_type = PREVIEW_FUNC_START_PREVIEW;
cb_data_info.frame_data = &frame_type;
prev_cb_start(handle, &cb_data_info);
prev_cb_start 的处理:
case PREV_EVT_CB_START:
cb_data_info = (struct prev_cb_info *)message->data;
if (!handle->oem_cb) {
CMR_LOGE("oem_cb is null");
break;
}
ret = handle->oem_cb(handle->oem_handle, cb_data_info->cb_type,
cb_data_info->func_type, cb_data_info->frame_data);
if (cb_data_info->frame_data) {
free(cb_data_info->frame_data);
cb_data_info->frame_data = NULL;
}
break;
Continue to call here cmr_oem中处理
9,cmr_oem处理回调
init_param.oem_cb = camera_preview_cb;
camera_preview_cb 会对 cb_type 修改
if (PREVIEW_FUNC_START_PREVIEW == func) {
oem_func = CAMERA_FUNC_START_PREVIEW;
} else if (PREVIEW_FUNC_STOP_PREVIEW == func) {
oem_func = CAMERA_FUNC_STOP_PREVIEW;
} else if (PREVIEW_FUNC_START_CAPTURE == func) {
oem_func = CAMERA_FUNC_TAKE_PICTURE;
} else {
CMR_LOGE("err, %d", func);
goto exit;
}
case PREVIEW_EVT_CB_FRAME:
oem_cb_type = CAMERA_EVT_CB_FRAME;
PREVIEW_FUNC_START_PREVIEW === 》CAMERA_FUNC_START_PREVIEW
PREVIEW_EVT_CB_FRAME ===》CAMERA_EVT_CB_FRAME
10,SprdCamera3OEMIf::camera_cb
case CAMERA_FUNC_START_PREVIEW:
obj->HandleStartPreview(cb, parm4);
break;
// HandleStartPreview 中的处理:
case CAMERA_EVT_CB_FRAME:
HAL_LOGV("CAMERA_EVT_CB_FRAME");
switch (getPreviewState()) {
case SPRD_PREVIEW_IN_PROGRESS:
receivePreviewFrame((struct camera_frame_type *)parm4);
break;
11,SprdCamera3OEMIf::receivePreviewFrame
关于 receivePreviewFrame 的逻辑,我们在之前介绍SprdCamera3OEMIfmentioned in the article,cam3OEMIfThe processing of the received preview frame is as follows:
PreviewFrameFaceBeauty(frame, &beautyLevels);
PreviewFrameCamDebug(frame);
/* video stream */
PreviewFrameVideoStream(frame, buffer_timestamp);
/* preview stream, original code has goto exit */
ret = PreviewFramePreviewStream(frame, buffer_timestamp);
/* callback stream */
PreviewFrameCallbackStream(frame, buffer_timestamp);
/* yuv2 stream */
PreviewFrameYuv2Stream(frame, buffer_timestamp);
/* zsl stream */
PreviewFrameZslStream(frame, buffer_timestamp);
Related to the preview process is that PreviewFramePreviewStream 函数
12,SprdCamera3OEMIf::PreviewFramePreviewStream
PreviewFramePreviewStream The key logic is to passchannelwill frame datacallback上去
channel->channelCbRoutine(frame_num, buffer_timestamp,CAMERA_STREAM_TYPE_PREVIEW);
13,SprdCamera3RegularChannel::channelCbRoutine (buffDoneDQ)
channelCbRoutineThe main logic is to build a cam_result_data_info_t result_info ,Which of course contains frame data,然后将 result_info Continue to pull back upwards.
cam_result_data_info_t result_info;
result_info.is_urgent = false;
result_info.buffer = buffer;
result_info.frame_number = frame_number;
result_info.stream = stream;
result_info.timestamp = timestamp;
result_info.buff_status = CAMERA3_BUFFER_STATUS_OK;
result_info.msg_type = CAMERA3_MSG_SHUTTER;
mChannelCB(&result_info, mUserData);
channelCbRoutine还有一个非常重要的操作:
ret = mCamera3Stream[index]->buffDoneDQ(frame_number, &buffer);
还记得我们在 Send a preview request 中的第3called in step buffDoneQ么. 这两者buffDoneDQ 和 buffDoneQ是相反的操作.
- Passed at the time of the preview request SprdCamera3GrallocMemory 的map 函数得到buffert的虚拟地址
- Passed when getting the preview frame data callbackSprdCamera3GrallocMemory 的unmap The function frees the virtual address
到这里 Process preview frames process is also completed.We will also preview the request and preview the entire slave of the callback hal 到oem 在到 hal processes are colluded.This article involves more logic,Some of the details we did not expand,Because before there are key to thesec/cppDocumentation is presented separately,If you are not sure, you can read the previous article.
log 跟踪
最后,We pass a one-click desktopCameraApp来启动camera预览的logLet's take a look at two key figures
- frameNumber
- addr_vir
顺序增长的 frameNumber
Sending a preview requestHWI下的processCaptureRequest The function will be as followslog
HAL_LOGD("camId=%d, bufs_num=%d, frame_num=%d, cap_intent=%d, pic_req=%d, "
"first_regular_req=%d",
mCameraId, request->num_output_buffers, request->frame_number,
captureIntent, mPictureRequest, mFirstRegularRequest);
在SprdCamera3OEMIfReceive frame data function PreviewFramePreviewStream There are as follows according to the frame datay_vir_addr获取 frame_num的log
cmr_uint buff_vir = (cmr_uint)(frame->y_vir_addr);
ret = pre_stream->getQBufNumForVir(buff_vir, &frame_num);
HAL_LOGD("mCameraId=%d, prev:fd=0x%x, vir=0x%lx, num=%d, width=%d, "
"height=%d, time=0x%llx, iso_value:%d",
mCameraId, (cmr_u32)frame->fd, buff_vir, frame_num, frame->width,
frame->height, buffer_timestamp, ae_iso);
我们来看下log的打印:
可以看到,Basically a frame request,A frame callback,and callback frame_num 一定小于 请求的 frame_num
Line 219697: 08-09 11:34:44.687 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=2, cap_intent=1, pic_req=0, first_regular_req=0
Line 219737: 08-09 11:34:44.695 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=3, cap_intent=1, pic_req=0, first_regular_req=0
Line 219862: 08-09 11:34:44.991 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=0, width=960, height=720, time=0x3c0ec14062d8, iso_value:2500
Line 219915: 08-09 11:34:45.020 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=4, cap_intent=1, pic_req=0, first_regular_req=0
Line 220022: 08-09 11:34:45.085 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=1, width=960, height=720, time=0x3c0ec7373dd8, iso_value:2500
Line 220054: 08-09 11:34:45.116 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=5, cap_intent=1, pic_req=0, first_regular_req=0
Line 220136: 08-09 11:34:45.189 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=2, width=960, height=720, time=0x3c0ecd2e43d0, iso_value:1000
Line 220159: 08-09 11:34:45.219 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=6, cap_intent=1, pic_req=0, first_regular_req=0
Line 220299: 08-09 11:34:45.290 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=3, width=960, height=720, time=0x3c0ed3243c40, iso_value:1000
Line 220325: 08-09 11:34:45.320 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=7, cap_intent=1, pic_req=0, first_regular_req=0
Line 220390: 08-09 11:34:45.330 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=4, width=960, height=720, time=0x3c0ed58722e0, iso_value:1250
Line 220428: 08-09 11:34:45.350 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=8, cap_intent=1, pic_req=0, first_regular_req=0
Line 220498: 08-09 11:34:45.369 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=5, width=960, height=720, time=0x3c0ed7ea28c0, iso_value:1250
Line 220526: 08-09 11:34:45.401 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=9, cap_intent=1, pic_req=0, first_regular_req=0
Line 220579: 08-09 11:34:45.407 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=6, width=960, height=720, time=0x3c0eda4cffc0, iso_value:1600
Line 220619: 08-09 11:34:45.435 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=10, cap_intent=1, pic_req=0, first_regular_req=0
Line 220649: 08-09 11:34:45.445 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=7, width=960, height=720, time=0x3c0edcaff600, iso_value:1600
Line 220712: 08-09 11:34:45.474 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=11, cap_intent=1, pic_req=0, first_regular_req=0
Line 220778: 08-09 11:34:45.493 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=8, width=960, height=720, time=0x3c0edf12d0e8, iso_value:1600
Line 220811: 08-09 11:34:45.524 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=12, cap_intent=1, pic_req=0, first_regular_req=0
Line 220858: 08-09 11:34:45.529 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=9, width=960, height=720, time=0x3c0ee1764fe0, iso_value:1600
Line 220892: 08-09 11:34:45.540 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=13, cap_intent=1, pic_req=0, first_regular_req=0
Line 220950: 08-09 11:34:45.567 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=10, width=960, height=720, time=0x3c0ee3d8adc8, iso_value:1600
Line 220992: 08-09 11:34:45.591 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=14, cap_intent=1, pic_req=0, first_regular_req=0
Line 221062: 08-09 11:34:45.609 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=11, width=960, height=720, time=0x3c0ee63bc730, iso_value:1250
Line 221084: 08-09 11:34:45.623 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=15, cap_intent=1, pic_req=0, first_regular_req=0
Line 221157: 08-09 11:34:45.652 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=12, width=960, height=720, time=0x3c0ee89e7b08, iso_value:1250
Line 221181: 08-09 11:34:45.674 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=16, cap_intent=1, pic_req=0, first_regular_req=0
Line 221247: 08-09 11:34:45.690 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=13, width=960, height=720, time=0x3c0eeb012710, iso_value:1250
Line 221269: 08-09 11:34:45.708 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=17, cap_intent=1, pic_req=0, first_regular_req=0
Line 221339: 08-09 11:34:45.729 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=14, width=960, height=720, time=0x3c0eed644c30, iso_value:1250
Line 221360: 08-09 11:34:45.741 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=18, cap_intent=1, pic_req=0, first_regular_req=0
Line 221436: 08-09 11:34:45.769 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=15, width=960, height=720, time=0x3c0eefc72330, iso_value:640
Line 221461: 08-09 11:34:45.791 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=19, cap_intent=1, pic_req=0, first_regular_req=0
Line 221560: 08-09 11:34:45.811 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=16, width=960, height=720, time=0x3c0ef22a30e0, iso_value:640
Line 221582: 08-09 11:34:45.825 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=20, cap_intent=1, pic_req=0, first_regular_req=0
Line 221619: 08-09 11:34:45.844 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=17, width=960, height=720, time=0x3c0ef48cfc28, iso_value:640
Line 221641: 08-09 11:34:45.859 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=21, cap_intent=1, pic_req=0, first_regular_req=0
Line 221757: 08-09 11:34:45.935 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=18, width=960, height=720, time=0x3c0ef9ead348, iso_value:640
Line 221779: 08-09 11:34:45.959 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=22, cap_intent=1, pic_req=0, first_regular_req=0
Line 221874: 08-09 11:34:46.025 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=19, width=960, height=720, time=0x3c0eff48c9a8, iso_value:1250
Line 221896: 08-09 11:34:46.043 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=23, cap_intent=1, pic_req=0, first_regular_req=0
Line 222009: 08-09 11:34:46.120 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=20, width=960, height=720, time=0x3c0f04a69ce0, iso_value:1250
Line 222042: 08-09 11:34:46.144 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=24, cap_intent=1, pic_req=0, first_regular_req=0
Line 222086: 08-09 11:34:46.156 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=21, width=960, height=720, time=0x3c0f07097f98, iso_value:1250
Line 222136: 08-09 11:34:46.178 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=25, cap_intent=1, pic_req=0, first_regular_req=0
Line 222187: 08-09 11:34:46.196 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=22, width=960, height=720, time=0x3c0f096d3158, iso_value:1250
Line 222231: 08-09 11:34:46.211 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=26, cap_intent=1, pic_req=0, first_regular_req=0
Line 222318: 08-09 11:34:46.244 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=23, width=960, height=720, time=0x3c0f0bcf9710, iso_value:1250
Line 222381: 08-09 11:34:46.263 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=27, cap_intent=1, pic_req=0, first_regular_req=0
Line 222447: 08-09 11:34:46.282 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=24, width=960, height=720, time=0x3c0f0e325e70, iso_value:1250
Line 222477: 08-09 11:34:46.297 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=28, cap_intent=1, pic_req=0, first_regular_req=0
Line 222546: 08-09 11:34:46.320 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=25, width=960, height=720, time=0x3c0f109525d0, iso_value:1250
Line 222567: 08-09 11:34:46.329 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=29, cap_intent=1, pic_req=0, first_regular_req=0
Line 222648: 08-09 11:34:46.363 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=26, width=960, height=720, time=0x3c0f12f80c70, iso_value:1250
Line 222678: 08-09 11:34:46.380 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=30, cap_intent=1, pic_req=0, first_regular_req=0
used sequentiallyfd & addr_vir
SprdCamera3GrallocMemory::map 到的 fd & addr_vir :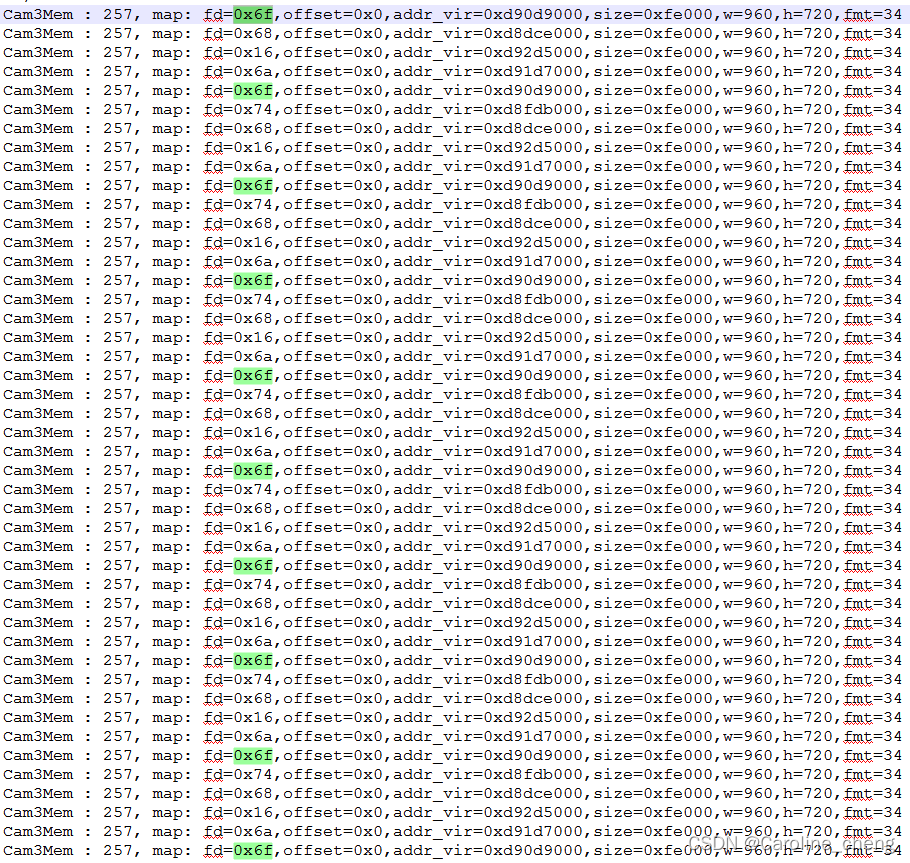
SprdCamera3OEMIf在PreviewFramePreviewStreamof the received frame data fd & addr_vir :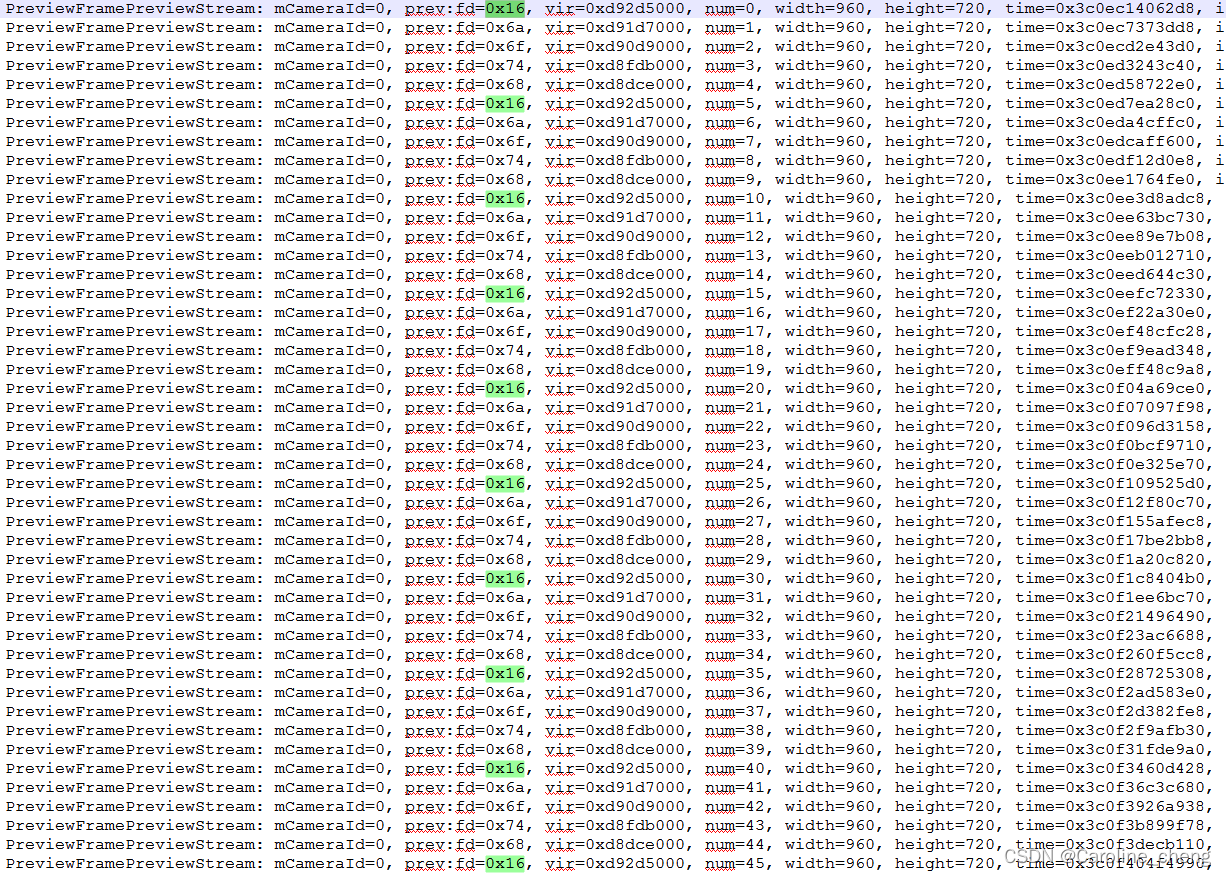
我们看到 fd 和 addr_vir 只有5One keeps cycling:
fd=0x6f,offset=0x0,addr_vir=0xd90d9000
fd=0x74,offset=0x0,addr_vir=0xd8fdb000
fd=0x68,offset=0x0,addr_vir=0xd8dce000
fd=0x16,offset=0x0,addr_vir=0xd92d5000
fd=0x6a,offset=0x0,addr_vir=0xd91d7000
这与我们在SprdCamera3OEMIfseen in mZslNum 的值是一致的,也就是说hal申请了5个buffer,A request to preview frame data frame by frame,Then call back frame by frame,Just keep going here5个buffer写、读.
logAlso further verified the preview request and callback flow we tracked earlier.
到这里,hal 和 oem We have finished the process of preview request and callback completed by module public.
边栏推荐
- 第四届红帽杯网络安全大赛
- 2022.8.9 Mock Competition
- 3D model reconstruction of UAV images based on motion structure restoration method based on Pix4Dmapper
- 玩转doxygen 之RT-THREAD
- 着力提升制造业核心竞争力,仪器仪表产业迎高质量发展
- Using SylixOS virtual serial port, serial port free implementation system
- 用示波器揭示以太网传输机制
- ArcMap创建镶嵌数据集、导入栅格图像并修改像元数值显示范围
- ACM解题笔记——HDU 1401 Solitaire(DBFS)
- Single-click to cancel the function
猜你喜欢
TCL:事务的特点,语法,测试例——《mysql 从入门到内卷再到入土》
Likou 221 questions, the largest square
【Windows】你不能访问此共享文件夹,因为你组织的安全策略阻止未经身份验证的来宾访问,这些策略可帮助保护你的电脑
石油化工行业商业供应链管理系统:标准化供应商管理,优化企业供应链采购流程
直播课堂系统09--腾讯云点播管理模块(一)
camera预览流程 --- 从HAL到OEM
优化是一种习惯●出发点是'站在靠近临界'的地方

apr_thread使用内存之谜
什么是Jmeter?Jmeter使用的原理步骤是什么?
这些不可不知的JVM知识,我都用思维导图整理好了
随机推荐
微擎盲盒交友变现-vp_ph打开慢优化
【nvm】【node多版本管理工具】使用说明和踩坑(exit status 1)
Using SylixOS virtual serial port, serial port free implementation system
Live Classroom System 08-Tencent Cloud Object Storage and Course Classification Management
扩展中国剩余定理
RTL8721DM 双频WIFI + 蓝牙5.0 物联网(IoT)应用
Redis 性能影响 - 异步机制和响应延迟
化学制品制造业数智化供应链管理系统:建立端到端供应链采购一体化平台
Labelme-5.0.1 version edit polygon crash
FPGA - 7系列 FPGA内部结构之Memory Resources -03- 内置纠错功能
Before implementing MES management system, these three questions to consider
论配置化系统的配置
根心与根轴
为什么一般公司面试结束后会说「回去等消息」,而不是直接告诉面试者结果?
B. Same Parity Summands
智能方案设计——智能跳绳方案
HGAME 2022 Week2 writeup by pankas
Play RT-THREAD of doxygen
2022.8.8好题选讲(数论场)
华为路由器旁挂引流实验(使用流策略)