当前位置:网站首页>Introduction to nonparametric camera distortion model
Introduction to nonparametric camera distortion model
2022-04-23 06:38:00 【mightbxg】
Recently, I was reading papers related to camera distortion model , One of them is called nonparametric model, which is interesting :
Schöps, Thomas, Viktor Larsson, Marc Pollefeys, and Torsten Sattler. “Why Having 10,000 Parameters in Your Camera Model Is Better Than Twelve.” ArXiv:1912.02908 [Cs], June 23, 2020. http://arxiv.org/abs/1912.02908.
The paper also open source related code :https://github.com/puzzlepaint/camera_calibration.
Parametric distortion model
At present, the most common distortion models are :
- Brown: Radial + Tangential distortion , Parameters have k1, k2, k3, p1, p2
- Rational: Rational model , Can be seen as Brown Extension of the model , Parameters have k1, k2, k3, k4, k5, k6, p1, p2
- KB: The so-called fisheye model , Parameters have k1, k2, k3, k4
OpenCV in calibrateCamera adopt 14 Two parameters support Brown、Rational Wait for the model ,fisheye::calibrate Is used to calibrate KB Model .
There are other FoV、UCM、Double Sphere Wait for the model , Visible in some SLAM System , See paper :
Usenko, Vladyslav, Nikolaus Demmel, and Daniel Cremers. “The Double Sphere Camera Model.” In 2018 International Conference on 3D Vision (3DV), 552–60. Verona: IEEE, 2018. https://doi.org/10.1109/3DV.2018.00069.
These models can be classified as “ Parametric model ”, Because they all use models with a small number of parameters to fit the distortion of all pixels on the whole image . such as KB The projection function of the model is :
π ( x ) = [ f x d ( θ ) x r f y d ( θ ) y r ] + [ c x c y ] , r = x 2 + y 2 , θ = a t a n 2 ( r , z ) , d ( θ ) = θ + k 1 θ 3 + k 2 θ 5 + k 3 θ 7 + k 4 θ 9 \begin{aligned} \pi(\bold{x}) =& \begin{bmatrix} f_xd(\theta)\frac{x}{r} \\ f_yd(\theta)\frac{y}{r} \end{bmatrix} + \begin{bmatrix} c_x \\ c_y \end{bmatrix} , \\ r =& \sqrt{x^2+y^2}, \\ \theta =& atan2(r, z), \\ d(\theta) =& \theta + k_1 \theta^3+k_2 \theta^5+k_3 \theta^7+k_4 \theta^9 \end{aligned} π(x)=r=θ=d(θ)=[fxd(θ)rxfyd(θ)ry]+[cxcy],x2+y2,atan2(r,z),θ+k1θ3+k2θ5+k3θ7+k4θ9
Only four parameters (k1~k4) The distortion of any point on the image can be calculated .
Nonparametric distortion model
The so-called nonparametric model does not mean that there are no parameters , But relative to the parametric model , They use a large number of parameters to represent the distortion of the whole picture . The most extreme case is that each pixel has a set of parameters to represent its distortion , That is, directly record the mapping of each point from distorted image to undistorted image ( Or vice versa ). therefore ,OpenCV Medium initUndistortRectifyMap The mapping table generated by function can be understood as the parameter table of nonparametric distortion model .
obviously , Nonparametric model is an extension of parametric model , It has the greatest flexibility , Theoretically, it can be used to fit any camera distortion . But at the same time, the more General The easier the model is to over fit , In order to achieve better distortion removal effect , Nonparametric models require much more calibration data than parametric models .
In order to reduce the difficulty of calibration , The paper mentioned at the beginning of this paper proposes a sparse nonparametric model :

As shown in the figure above , The whole image is divided into small distortion bands according to their size Grid, Every Grid There's only one control point , Corresponding to a set of distortion parameters , That is, the mapping from the coordinates of the control point to the coordinates of the undistorted image . When removing distortion at any point , First find its surroundings 4×4 Control points , And then use be based on B Bicubic interpolation of splines Obtain the distortion parameters of the current point , Thus mapping to distortion free coordinates .
Because the model parameters save the mapping from distorted coordinates to undistorted coordinates , This method can easily realize point distortion removal ( Corresponding unproject The process ), But the plus distortion of points ( Corresponding project The process ) But it takes iteration to achieve .
Key code
The author's open source code is a very huge project , Even the nonlinear optimization solver has been implemented once . If you just want to understand and use the nonparametric distortion model , Just focus on these documents :
- applications/camera_calibration/src/camera_calibration/b_spline.h
Clear interpolation calculation process - applications/camera_calibration/src/camera_calibration/models/central_generic.cc
Various functions related to calibration , contain project、unporject、fitToModel etc. - applications/camera_calibration/generic_models/src/central_generic.h
Application related functions , contain project、unproject、save、load etc.
版权声明
本文为[mightbxg]所创,转载请带上原文链接,感谢
https://yzsam.com/2022/04/202204230546583549.html
边栏推荐
猜你喜欢
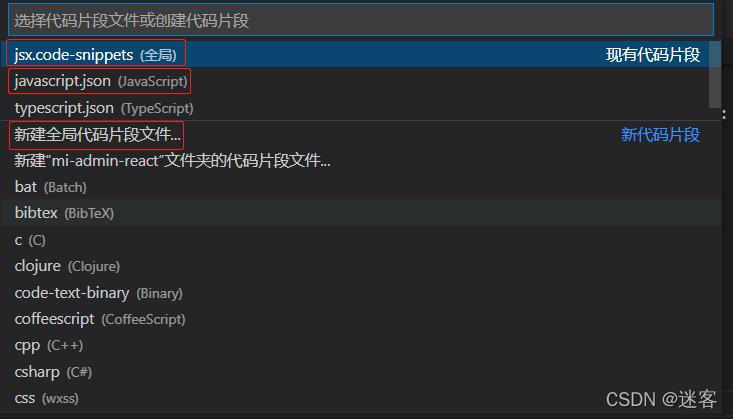
Vscode custom comments

ArcGIS表转EXCEL超出上限转换失败
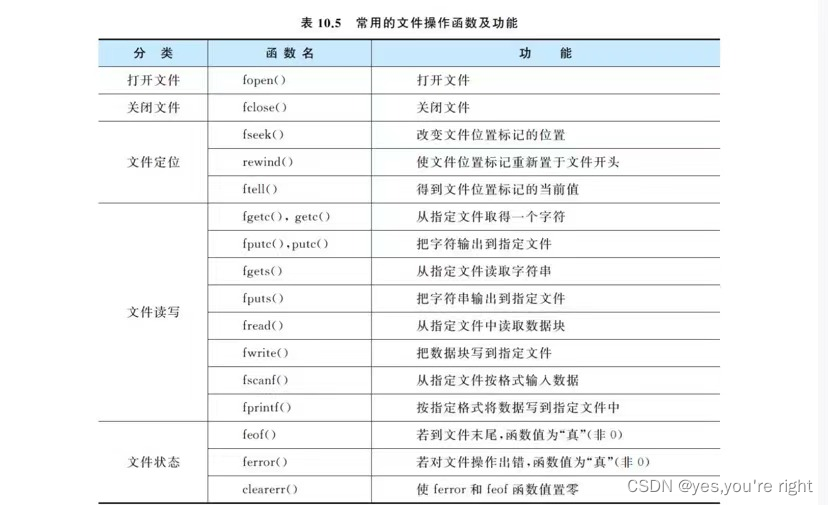
利用文件保存数据(c语言)

【UDS统一诊断服务】四、诊断典型服务(6)— 输入输出控制单元(0x2F)

解决ArcGIS分区统计显示太多唯一值执行失败
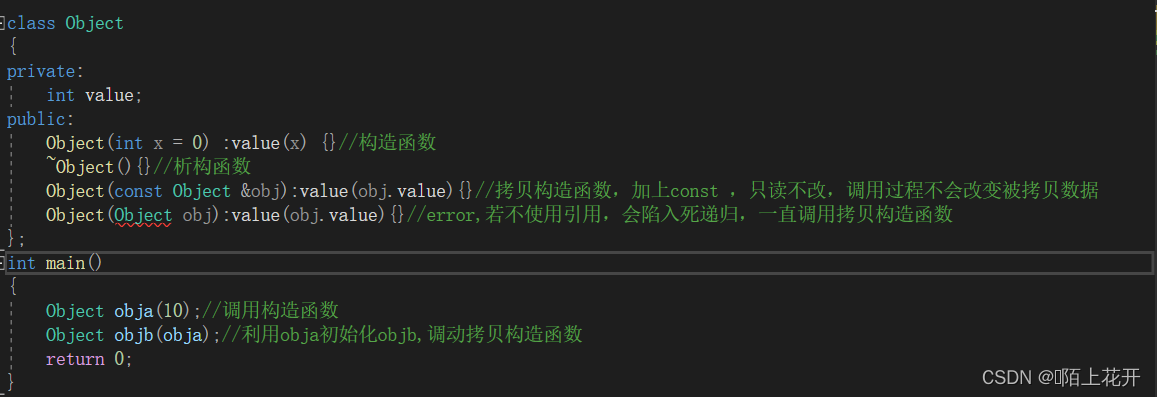
拷贝构造函数
[ThreadX] h743 + ThreadX + Filex migration record
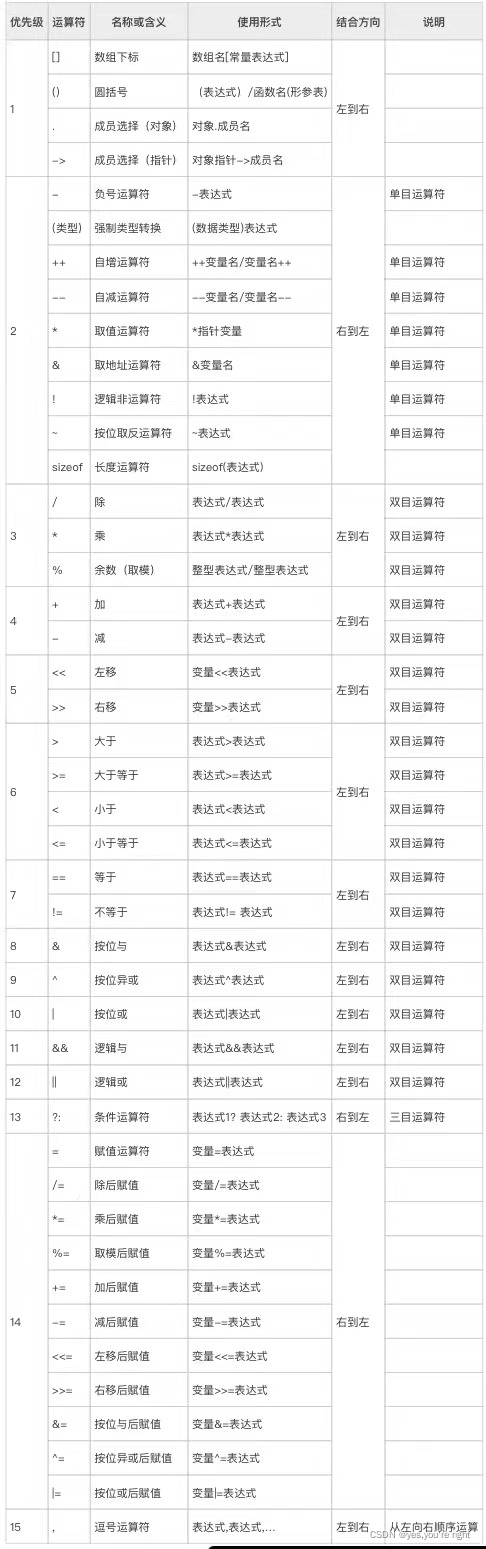
C语言的运算符

MySQL groups are sorted by a field, and the first value is taken

Cross domain issues - allow origin header contains multiple values but only one is allowed
![[ThreadX] h743 + ThreadX + Filex migration record](/img/5b/6796335fd9deeee878cad3e21ab2d9)
随机推荐
多线程爬取马可波罗网供应商数据
代理服务器
LaTeX配置与使用
PM2 deploy nuxt related commands
sqlite3加密版
TP download folder, compress folder and download
Gesture recognition research
pyppeteer爬虫
Easy to use data set and open source network comparison website
生成验证码
Object array and object pointer
日志
OpenCV使用 GenericIndex 进行 KNN 搜索
【无标题】
【UDS统一诊断服务】四、诊断典型服务(4)— 在线编程功能单元(0x34-0x38)
[UDS unified diagnostic service] IV. typical diagnostic service (2) - data transmission function unit
Robocode教程8——AdvancedRobot
【UDS统一诊断服务】二、网络层协议(2)— 数据传输规则(单帧与多帧)
Opencv uses genericindex for KNN search
如何安装jsonpath包