当前位置:网站首页>机器人控制器编程实践指导书旧版-实践三 直流电机(执行器)
机器人控制器编程实践指导书旧版-实践三 直流电机(执行器)
2022-08-10 17:27:00 【zhangrelay】
适用于UNO/2560/DUE/ESP8266/ESP32,2021年之前使用版本。

3.1 实践目的
- 掌握Arduino[ESP32]对直流电机控制的软硬件测试。
3.2 实践设备
- PC机一台
- Arduino[ESP32]开发板及配件等
- 万用表和示波器等
3.3 实践原理
- 初级:无
- 中级:按键控制电机起停、正反转。
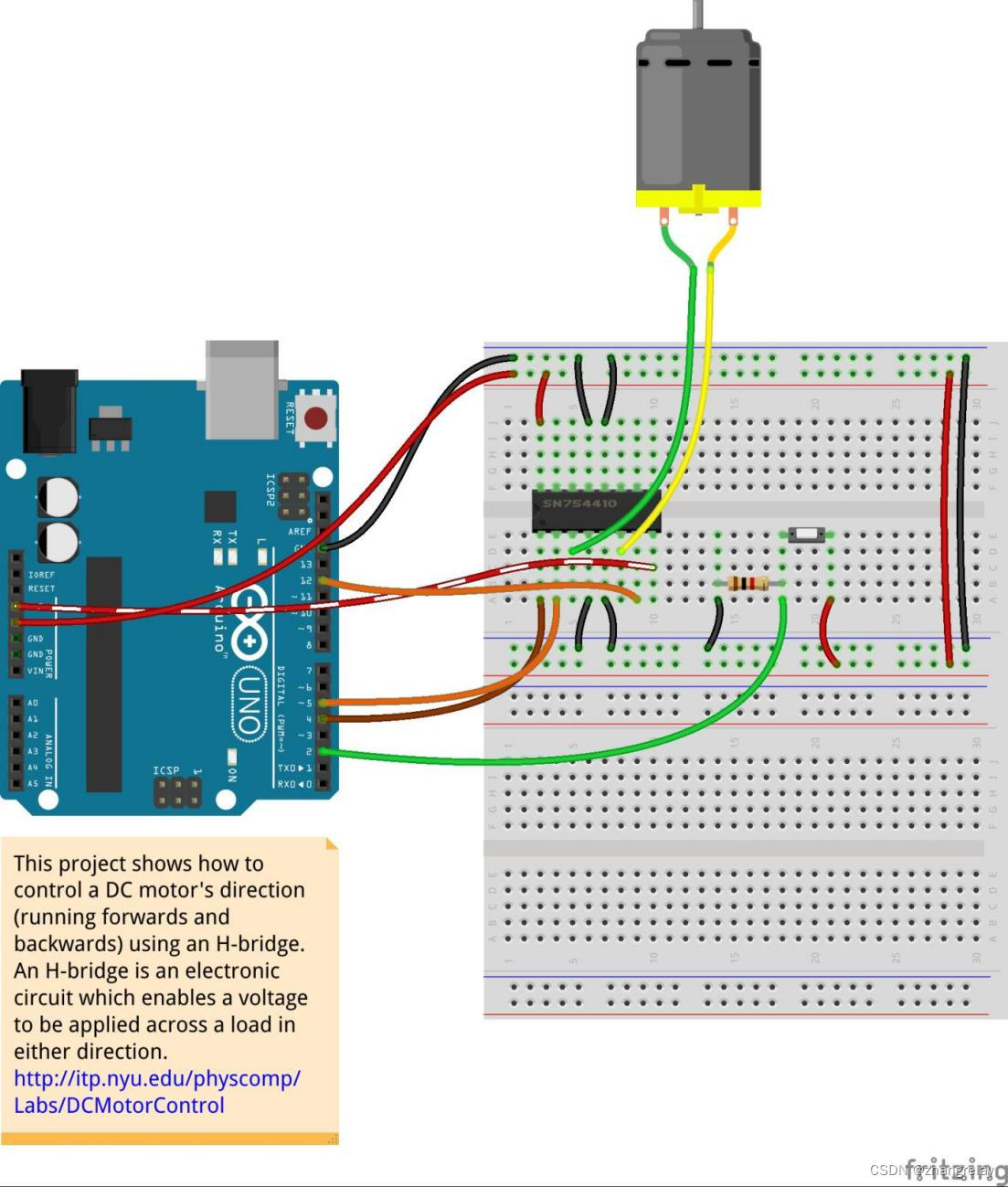
示意图

原理图
- 高级(ROS选修):
使用电脑键盘按键控制直流电机转速。
3.4 实践内容
阅读3.3中示意图、原理图和代码,在Arduino[ESP32]平台上完成实践。
3.5 实践问题
3.5.1 直流电机转速如何调节?
调整电枢电压,通过改变电枢电压来改变速度,属于恒转矩速度调节方法,但是这种调速严重影响电机力矩,所以很少用;
改变电动机的主磁通量会减弱磁通量,并使电动机从额定速度向上改变速度,属恒功率调速方法,动态相应比较慢,尽管可以无级平滑地调整速度,但调速范围很小;
改变电枢电路的电阻R,并连接电动机电枢的电阻来调节速度,这只能一步一步地调节速度,平滑度差,机械特性软,效率比较低下。;
PWM调速,20hz以上的频率,调整脉宽,达到调速的目的。
3.5.2 直流电机转速如何精确控制?
对直流电机的调速主要是依靠提高线圈的电流,也可以提高电压来提速,但很容易烧毁电动机;
使用直流调速器控制调整转速;
基于模糊PID的直流力矩电机转速控制。 在分析模糊控制和PID控制结合方式的基础上,设计一个二维模糊PID控制算法,该算法根据误差信号是否达到阈值来决定何时在模糊控制与PID控制之间切换.采用编码器、80196KC单片机、16位D/A转换器和直流力矩电并结合上述控制算法构成直流力矩电机的模糊PID稳速控制系统.通过对标准PID和模糊PID实测数据分析比较说明,模糊PID控制可以达到无超调输出,其调节时间小于标准PID控制的调节时间,稳态误差小于万分之四.
3.6 实践总结
回顾本次实践,遇到哪些问题,如何解决,经验和启发有哪些?
施加PWM信号来控制直流电机的速度。速度将与占空比成正比。要将PWM与ESP32一起使用,需要首先设置PWM信号属性。
要控制直流电动机的速度,需要更改PWM信号占空比。为此,可以使用ledcWrite()函数,该函数接受生成信号的PWM通道(而不是输出GPIO)和占空比的参数。
评分:
|
边栏推荐
- 未来5年的9大技术趋势
- ARM开发(三)ARM寻址方式,异常中断,异常向量表
- leetcode:339 嵌套列表权重和
- 浅析端口扫描原理
- promise笔记(四)
- 中国芯片的营收首破万亿,优势凸显的成熟工艺产能将称霸全球
- R语言ggplot2可视化:使用ggpubr包的ggscatter函数可视化分组散点图、stat_mean函数在分组数据点外侧绘制凸包并突出显示分组均值点、自定会均值点的大小以及透明度
- 重庆新壹汽与一汽集团达成新能源项目战略合作,赋能“碳中和”创造“碳财富”
- R语言使用ggpubr包的ggbarplot函数可视化柱状图、设置add参数为mean_se和jitter可视化不同水平均值的柱状图并为柱状图添加误差线(se标准误差)和抖动数据点分布
- bp神经网络反向传播原理,BP神经网络反向传播
猜你喜欢






随机推荐
bp神经网络反向传播原理,BP神经网络反向传播
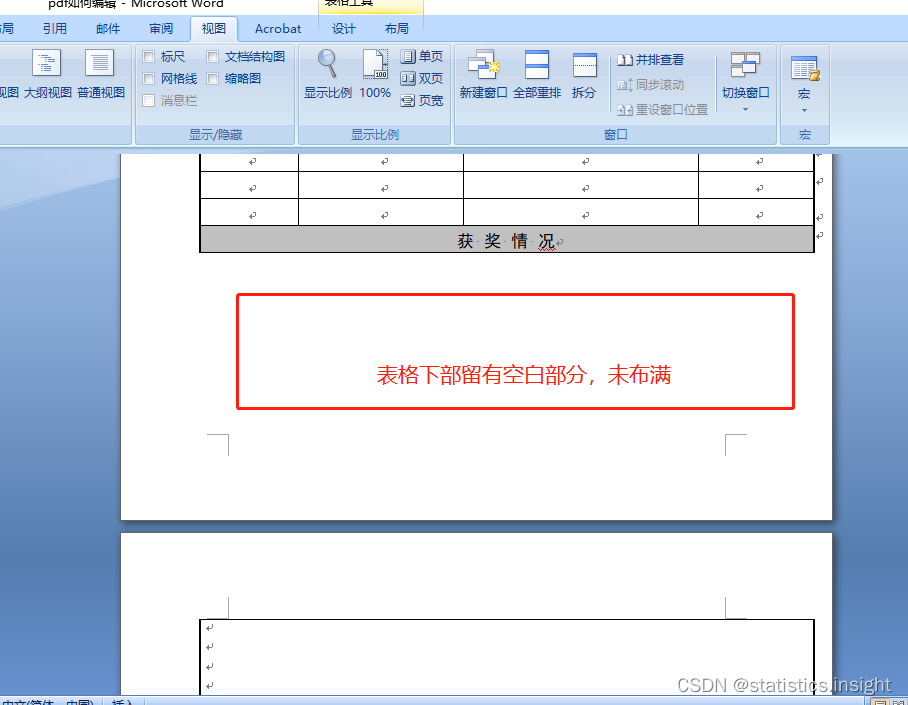
Word里表格跨页时自动断开,表格后留有空白部分,未布满整页,如何操作让表格上下页均匀布满?
Pytorch GPU模型推理时间探讨2——显卡warm up
基于AWS构建云上数仓第二步:AWS常见服务简介
leetcode:1137. 第 N 个泰波那契数
skywalking漏洞学习
重庆新壹汽与一汽集团达成新能源项目战略合作,赋能“碳中和”创造“碳财富”
Splitting and merging long markdown documents
神经网络全连接层的作用,各种神经网络的优缺点
还在用 Xshell?你 out 了,推荐一个更现代的终端连接工具,好用到爆!
HTTP学习——协议与术语、HTTP、缓存、Cookie
事务的隔离级别,MySQL的默认隔离级别
奥迪的极致高端属于一个大写的H?重塑时空,谁会是这个夜晚的主角?
【独立站运营】做社交媒体营销的两大关键点
招聘分析2020.6.1
C:枚举的优缺
router.afterEach()
skywalking vulnerability learning
符合信创要求的堡垒机有哪些?支持哪些系统?
【云原生| Docker】 部署 Django & mysql 项目