当前位置:网站首页>Camera calibration toobox for Matlab(一)—— 工具包的基本使用
Camera calibration toobox for Matlab(一)—— 工具包的基本使用
2022-08-08 16:54:00 【泉伟】
准备工作:下载图片路径:https://docs.opencv.org/2.4/_downloads/pattern.png
打印并拍照显示
第一步:在Matlab的菜单栏中APP查找Camera Calibrator工具;
进去以后我们会进入到Camera Calibration工具的UI界面;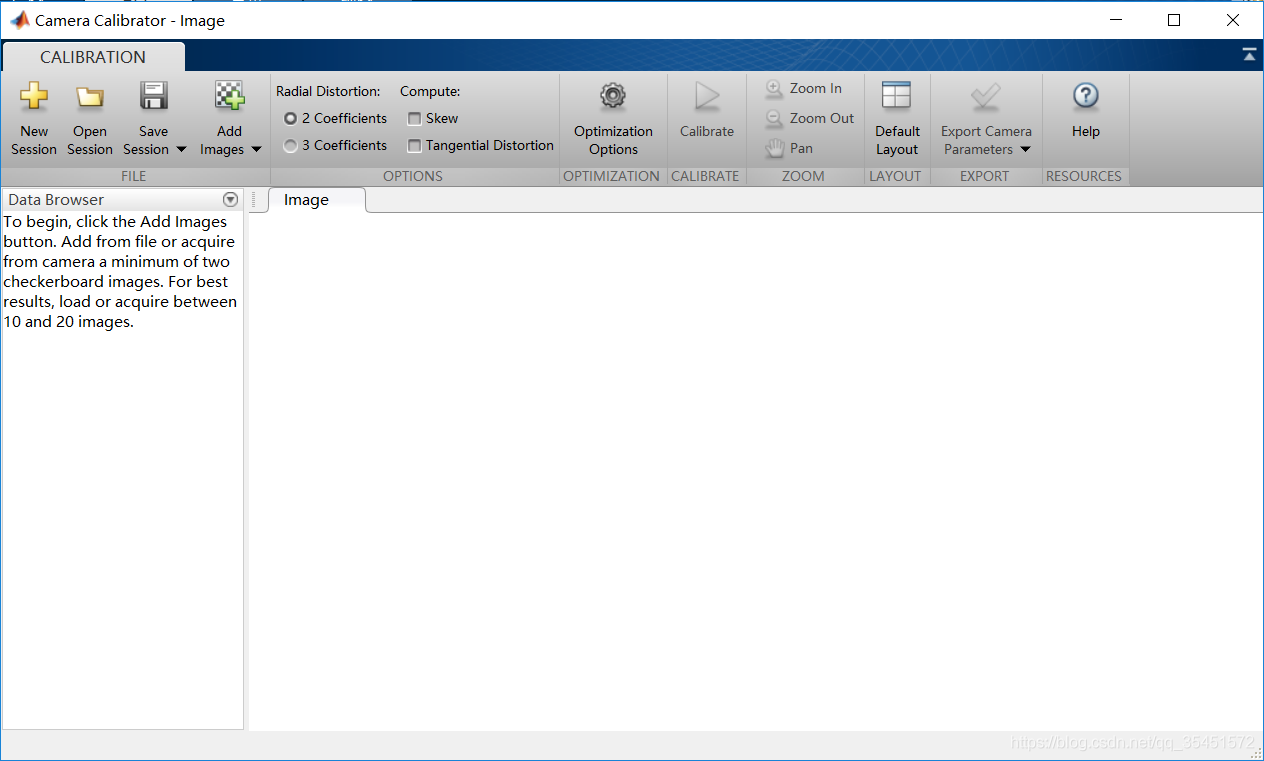
第二步:选择Add Images 按钮,添加照片。这里我们建议是提前拍好照片直接导入的,如果选择“From Camera”,设备还会调用摄像头,调用Matlab 摄像头模块,会比较麻烦的。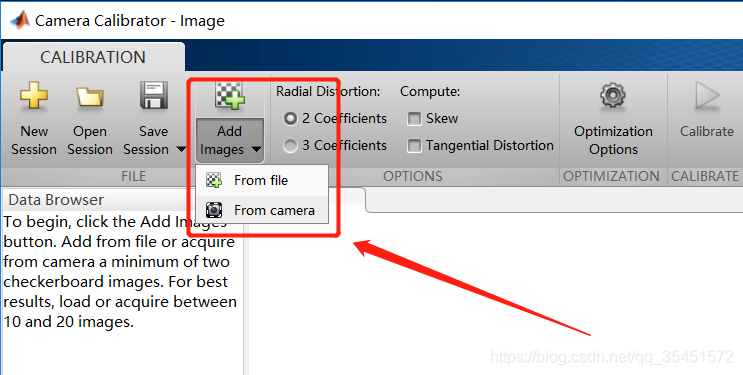
第三步:导入我们事先准备好的图片;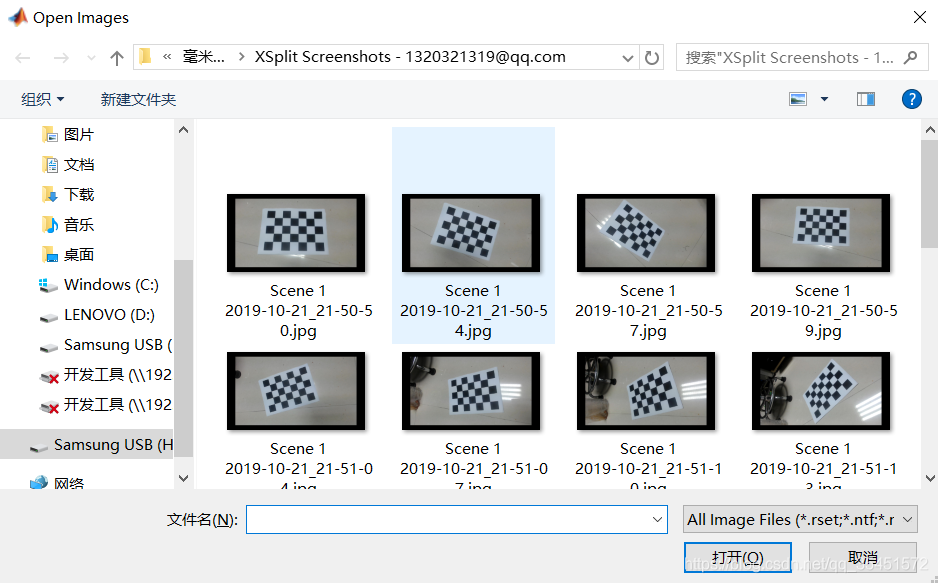
第四步:输入我们之前测量好的每个格子的大小。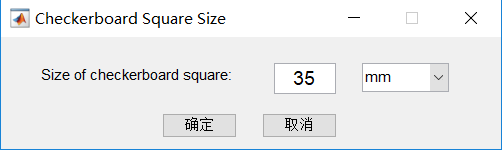
接着Matlab就会将我们的图像导入到自己的模块中。
当导入结束以后,会有一个检测结果,会显示是否有图片被拒绝,因为拍摄等一些原因会存在不清晰,Matlab不能正常检测的结果。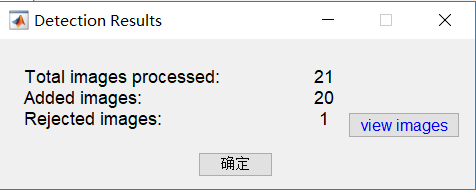
当我们都导入后主界面将会显示每张图像建立坐标系,以及每个交叉点的位置。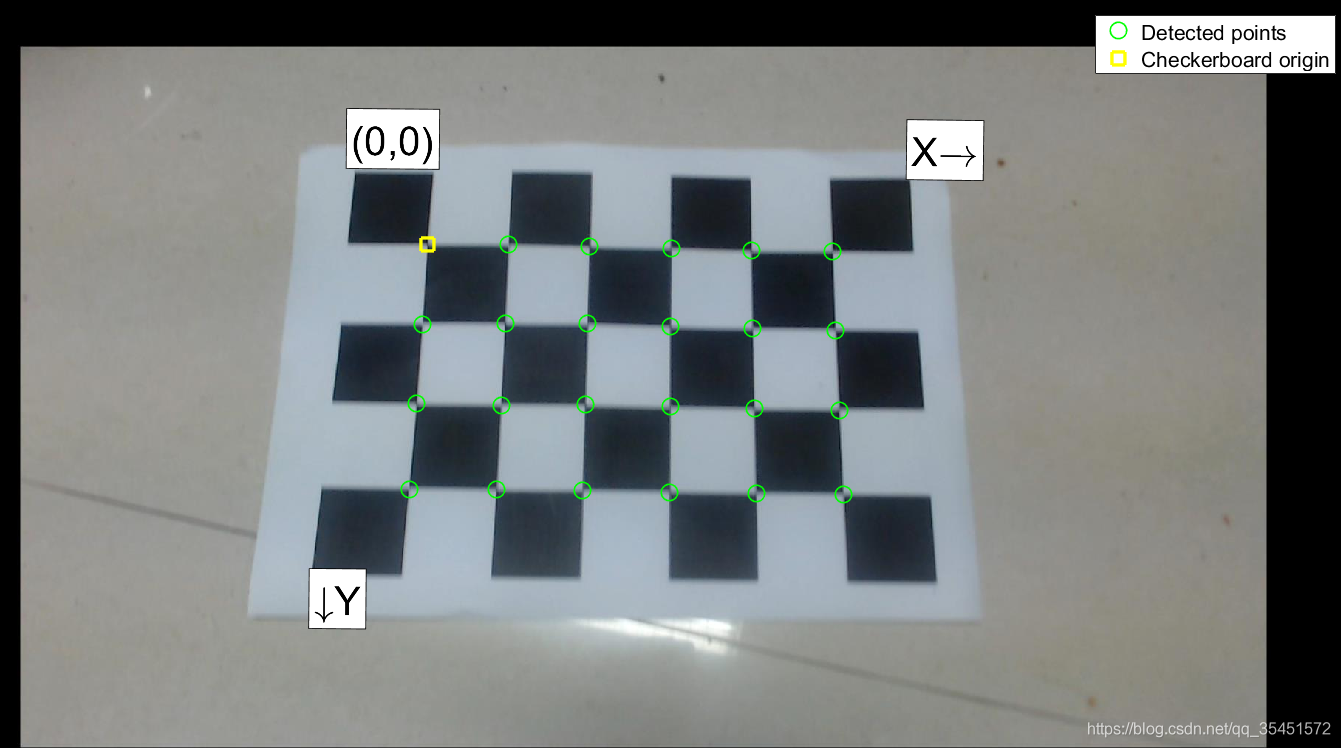
第五步:选择开始标定。
校正完后就能够看到Matlab模拟的 3D 空间位置拍摄图像。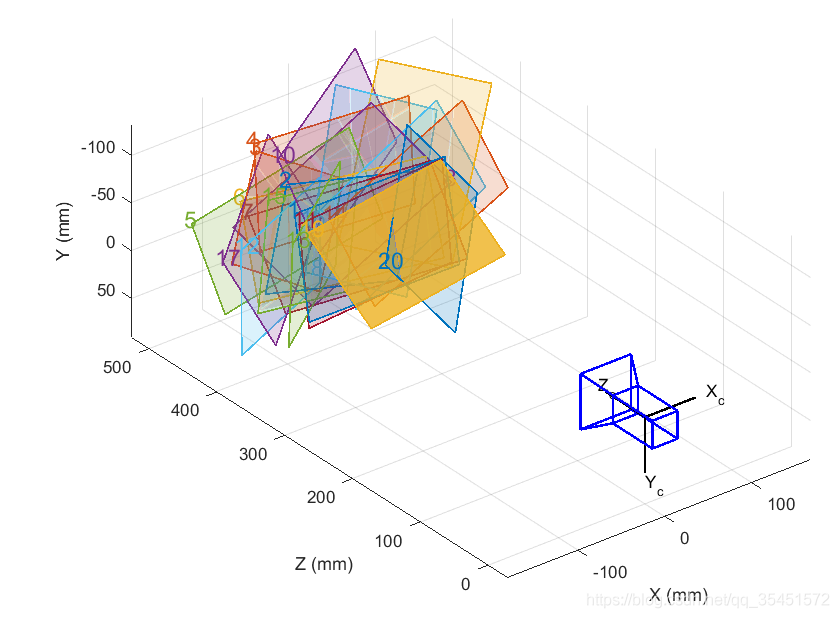

同时还可以得到每张图像中的误差统计。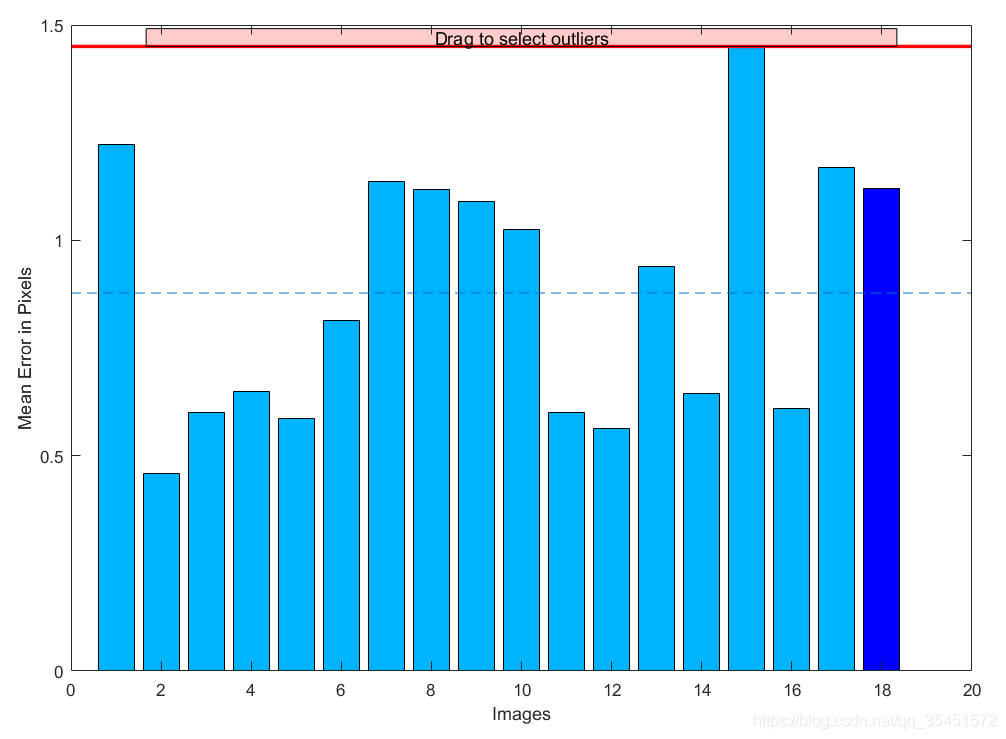

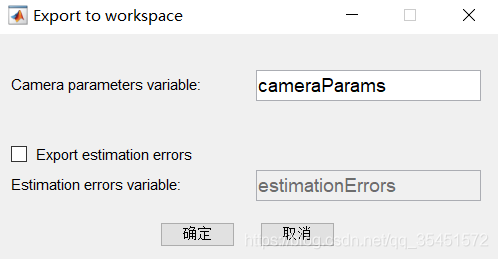
第六步:导出相机参数,我们可以选择直接导出,就会在Matlab主页面多出来一下cameraParams,它里边就存储这相机的参数。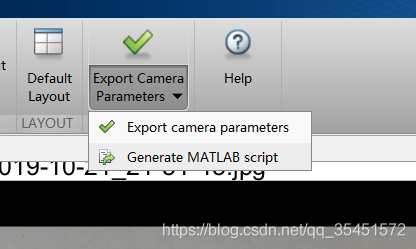
如下是相机参数截图。
参数解释:
| 英文名称 | 中文名称 |
|---|---|
| RadialDistortion | 镜像畸变 |
| Tangential Distortion | 切向失真 |
| NumRadialDistortionCoefficient | 数值径向失真系数 |
| Translation Vectors | 旋转矢量 |
| Reprojection Errors | 重投影误差 |
| RotationVectors | 旋转矢量 |
| IntrinsicMatrix | 内参矩阵 |
| Focal Length | 焦距 |
| Rotation Matrices | 旋转矩阵 |
边栏推荐
猜你喜欢







{kind=link}
随机推荐
信号生成和可视化
Digital image processing (6) -- image compression
【LeetCode】Exam Summary: Depth-First Search (DFS)
股票开户中金公司好不好,安全吗
bzoj5063 旅游
L2-026 小字辈 (25 分)
LeetCode_回溯_中等_491.递增子序列
【入门PCB】立创eda的学习
H. Huge Boxes of Animal Toys
iNFTnews | Metaverse brings new ideas for enterprise development
iNFTnews | 元宇宙为企业发展带来新思路
3531. 哈夫曼树
laravel - 查询构建器2
phar反序列化
4. S32K14X study notes: S32 Design Studio new and imported projects
bzoj1097 [POI2007]旅游景点atr
redis介绍&命令&性能相关&缓存穿透
pdf导出工具类
R语言4.04安装教程
mysql进阶(二十九)常用函数汇总