HSC4D: Human-centered 4D Scene Capture in Large-scale Indoor-outdoor Space Using Wearable IMUs and LiDAR. CVPR 2022
[Project page | Video]
Getting start
Dataset (Click here to download)

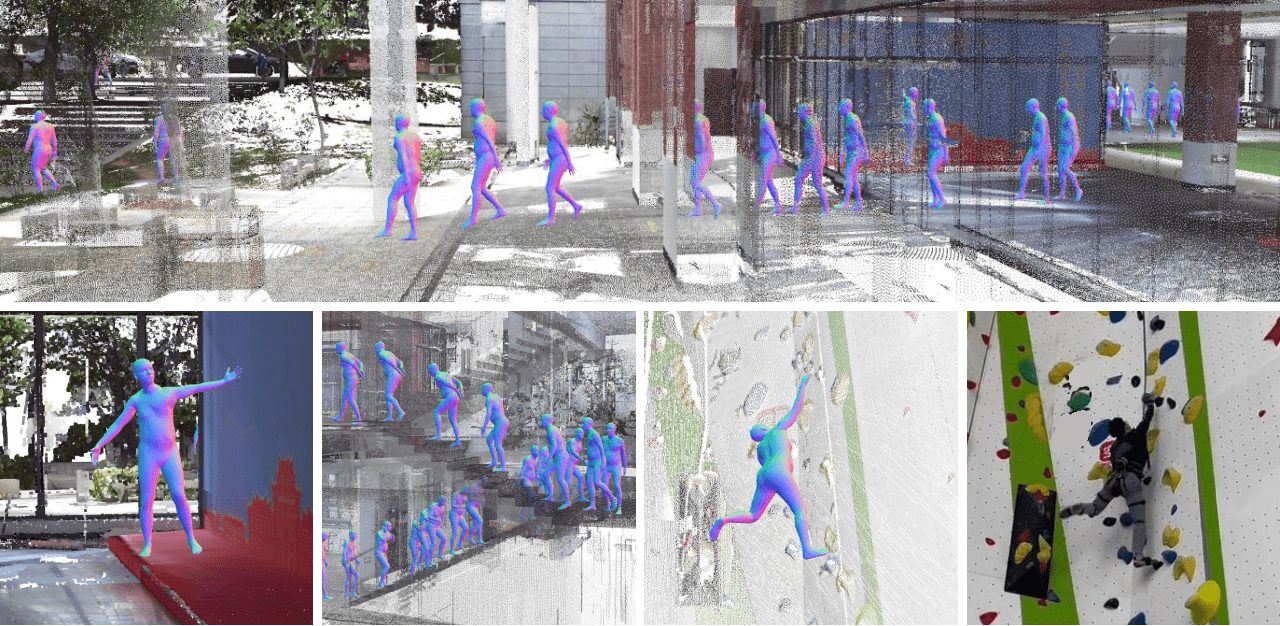
The large indoor and outdoor scenes in our dataset. Left: a climbing gym (1200 m2). Middle: a lab building with an outside courtyard 4000 m2. Right: a loop road scene 4600 m2
Data structure
Dataset root/
├── [Place_holder]/
| ├── [Place_holder].bvh # MoCap data from Noitom Axis Studio (PNStudio)
| ├── [Place_holder]_pos.csv # Every joint's roration, generated from `*_bvh`
| ├── [Place_holder]_rot.csv # Every joint's translation, generated from `*_bvh`
| ├── [Place_holder].pcap # Raw data from the LiDAR
| └── [Place_holder]_lidar_trajectory.txt # N×9 format file
├── ...
|
└── scenes/
├── [Place_holder].pcd
├── [Place_holder]_ground.pcd
├── ...
└── ...
- Place_holder can be replaced to
campus_raod,climbing_gym, andlab_building. *_lidar_trajectory.txtis generated by our Mapping method and manually calibrated with corresponding scenes.*_bvhand*_pcapare raw data from sensors. They will not be used in the following steps.- You can test your SLAM algorithm by using
*_pcapcaptured from Ouster1-64 with 1024×20Hz.
Preparation
- Download
basicModel_neutral_lbs_10_207_0_v1.0.0.pkland put it insmpldirectory. - Downloat the dataset and modify
dataset_rootanddata_nameinconfigs/sample.cfg.
dataset_root = /your/path/to/datasets
data_name = campus_road # or lab_building, climbing_gym
Requirement
Our code is tested under:
- Ubuntu: 18.04
- Python: 3.8
- CUDA: 11.0
- Pytorch: 1.7.0
Installation
conda create -n hsc4d python=3.8
conda install pytorch==1.7.0 torchvision==0.8.0 torchaudio==0.7.0 cudatoolkit=11.0 -c pytorch
pip install open3d chumpy scipy configargparse matplotlib pathlib pandas opencv-python torchgeometry tensorboardx
- Note: For mask conversion compatibility in PyTorch 1.7.0, you need to manually edit the source file in torchgeometry. Follow the guide here
$ vi /home/dyd/software/anaconda3/envs/hsc4d/lib/python3.8/site-packages/torchgeometry/core/conversions.py
# mask_c1 = mask_d2 * (1 - mask_d0_d1)
# mask_c2 = (1 - mask_d2) * mask_d0_nd1
# mask_c3 = (1 - mask_d2) * (1 - mask_d0_nd1)
mask_c1 = mask_d2 * ~(mask_d0_d1)
mask_c2 = ~(mask_d2) * mask_d0_nd1
mask_c3 = ~(mask_d2) * ~(mask_d0_nd1)
- Note: When nvcc fatal error occurs.
export TORCH_CUDA_ARCH_LIST="8.0" #nvcc complier error. nvcc fatal: Unsupported gpu architecture
Preprocess
-
Transfer Mocap data [Optional, data provided]
pip install bvhtoolbox # https://github.com/OlafHaag/bvh-toolbox bvh2csv /your/path/to/campus_road.bvh- Output:
campus_road_pos.csv,campus_road_rot.csv
- Output:
-
LiDAR mapping [Optional, data provided]
- Process pcap file
cd initialize pip install ouster-sdk python ouster_pcap_to_txt.py -P /your/path/to/campus_road.pcap [-S start_frame] [-E end_frame]
-
Run your Mapping/SLAM algorithm.
-
Coordinate alignment (About 5 degree error after this step)
- The human stands as an A-pose before capture, and the human's face direction is regarded as scene's $Y$-axis direction.
- Rotate the scene cloud to make its $Z$-axis perpendicular to the starting position's ground.
- Translate the scene to make its origin to the first SMPL model's origin on the ground.
- LiDAR's ego motion $T^W$ and $R^W$ are translated and rotated as the scene does.
-
Output:
campus_road_lidar_trajectory.txt,scenes/campus_road.pcd
- Process pcap file
-
Data preprocessing for optimization.
python preprocess.py --dataset_root /your/path/to/datasets -fn campus_road -D 0.1
Data fusion
To be added
Data optimization
python main.py --config configs/sample.cfg
Visualization
To be added
Copyright
The HSC4D dataset is published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License.You must attribute the work in the manner specified by the authors, you may not use this work for commercial purposes and if you alter, transform, or build upon this work, you may distribute the resulting work only under the same license. Contact us if you are interested in commercial usage.
Bibtex
@misc{dai2022hsc4d,
title={HSC4D: Human-centered 4D Scene Capture in Large-scale Indoor-outdoor Space Using Wearable IMUs and LiDAR},
author={Yudi Dai and Yitai Lin and Chenglu Wen and Siqi Shen and Lan Xu and Jingyi Yu and Yuexin Ma and Cheng Wang},
year={2022},
eprint={2203.09215},
archivePrefix={arXiv},
primaryClass={cs.CV}
}

 5 Oct 04, 2022
5 Oct 04, 2022
 368 Dec 06, 2022
368 Dec 06, 2022
 86 Dec 28, 2022
86 Dec 28, 2022
 172 Dec 23, 2022
172 Dec 23, 2022
 400 Dec 29, 2022
400 Dec 29, 2022
 5 Dec 10, 2022
5 Dec 10, 2022
 12 Dec 19, 2022
12 Dec 19, 2022
 1.2k Dec 22, 2022
1.2k Dec 22, 2022
 6 Dec 21, 2022
6 Dec 21, 2022
 81 Nov 22, 2022
81 Nov 22, 2022
 15 May 21, 2022
15 May 21, 2022
 29 Dec 07, 2022
29 Dec 07, 2022
 534 Dec 17, 2022
534 Dec 17, 2022
 131 Jan 06, 2023
131 Jan 06, 2023
 3 Apr 07, 2022
3 Apr 07, 2022
 108 Dec 31, 2022
108 Dec 31, 2022
 6 Nov 22, 2022
6 Nov 22, 2022
 239 Jan 02, 2023
239 Jan 02, 2023
 5.1k Jan 04, 2023
5.1k Jan 04, 2023
 149 Jan 04, 2023
149 Jan 04, 2023