当前位置:网站首页>ROS学习笔记-----ROS的使用教程
ROS学习笔记-----ROS的使用教程
2022-04-23 20:49:00 【YOULANSHENGMENG】
一,什么是结ROS系统
ROS(Robot Operating System)机器人操作系统实际上是提供了多节点协同机制,使用了话题、服务、参数服务器、action等通信机制,同时ROS还提供了Gazebo、rviz、rqt、rosbag等工具,这些工具的本质也是对通信消息的收发。
ROS本身提供了点对点网络,共同处理数据,它的基本概念包括节点、主节点、参数服务器、消息、服务、话题、包等等。
1.1、ROS的主要特点
(1)分布式架构(每一个工作进程都看作一个节点,使用节点管理器统一管理),
(2)多语言支持(如C++、Python等),
(3)良好的伸缩性(既可以写一个节点,也可以通过roslaunch将很多节点组织成一个更大的工程),
(4)源码开放(ROS遵循BSD协议,对个体和商业应用及修改完全免费)。
1.2 ROS常用命令
rospack-获取软件包有关信息:查看软件包依赖,
roscd-切换到软件包目录
rosls-查看软件包包含文件
rosnode-查看ros节点相关信息:查看节点列表,查看节点消息属性
rosrun-运行软件包-某一节点功能:rqt-graph
rostopic-获取话题相关信息
rosservice-获取服务相关信息
rosparam-获取参数相关信息
roslaunch-启动launch文件
rosmsg-查看消息有关信息
可以使用Tab补全代码
二、ROS中的计算图级
图概念描述
· Nodes:节点,一个节点即为一个可执行文件,它可以通过ROS与其它节点进行通信。
· Messages:消息,消息是一种ROS数据类型,用于订阅或发布到一个话题。
· Topics:话题,节点可以发布消息到话题,也可以订阅话题以接收消息。
· Master:节点管理器,ROS名称服务 (比如帮助节点找到彼此)。
· rosout: ROS中相当于stdout/stderr。
· roscore: 主机+ rosout + 参数服务器 (参数服务器会在后面介绍)
2.1 节点
节点是主要的计算执行进程。ROS是有很多节点组成的。 一个节点其实只不过是ROS程序包中的一个可执行文件。ROS节点可以使用ROS客户库与其他节点通信。节点可以发布或接收一个话题。节点也可以提供或使用某种服务。
(节点是ros中非常重要的一个概念,为了帮助初学者理解这个概念,这里举一个通俗的例子:
例如,咱们有一个机器人,和一个遥控器,那么这个机器人和遥控器开始工作后,就是两个节点。遥控器起到了下达指 令的作用;机器人负责监听遥控器下达的指令,完成相应动作。从这里我们可以看出,节点是一个能执行特定工作任 务的工作单元,并且能够相互通信,从而实现一个机器人系统整体的功能。在这里我们把遥控器和机器人简单定义为两个节点,实际上在机器人中根据控制器、传感器、执行机构等不同组成模块,还可以将其进一步细分为更多的节点,这个是根据用户编写的程序来定义的。)
启动一个结点的方法,使用乌龟教程为例:
roscore
rosrun turtlesim turtlesim_node
//如果想查看结点的图,执行下面的命令
rqt_graphROS 命令行工具rosnode:
| rosnode命令 | 作用 |
|---|---|
| rosnode list | 查询当前运行的所有节点 |
| rosnode info node_name | 显示该节点的详细信息 |
| rosnode kill node_name | 结束某个节点 |
| rosnode ping | 测试该节点是否存活 |
| rosnode machine | 列出在特定机器或列表机器上运行的节点 |
| rosnode cleanup | 清除不可运行节点的注册信息 |
在开发调试时经常会需要查看当前node以及node信息,所以请记住这些常用命令。如果想不起来,也可以通过rosnode help来查看rosnode命令的用法。
2.2. 消息
节点之间通过消息实现彼此的逻辑联系与数据交换。
ROS 命令行工具rosmsg:
| rosmsg命令 | 作用 |
|---|---|
| rosmsg show | 显示一条消息字段 |
| rosmsg list | 列出所有消息 |
| rosmsg package | 列出所有功能包消息 |
| rosmsg packages | 列出所有具有该消息的功能包 |
| rosmsg md5 | 显示一条消息的MD5检验值 |
2.3 话题
话题是一种传递消息(发布/订阅)的方式。每一条消息都要发布到相应的主题上,每一个话题都是强类型的。
ROS的话题消息可以使用TCP/IP或UDP传输,ROS默认使用的传输方式是TCP/IP。基于TCP传输成为TCPROS,是一种长连接方式;基于UDP传输的成为UDPROS,是一种低延迟、高效率的传输方式,但容易丢失数据,适合于远程操作。
| rostopic命令 | 作用 |
|---|---|
| rostopic bw /topic | 显示主题所使用的带宽 |
| rostopic echo /topic | 将主题对应的消息输出到屏幕 |
| rostopic find message_type | 按照类型查找主题 |
| rostopic hz /topic | 显示主题的发布频率 |
| rostopic info /topic | 输出关于该主题的信息 |
| rostopic list | 输出活动主题列表 |
| rostopic pub /topic type args | 将数据发布到主题 |
| rostopic type /topic | 输出主题类型 |
2.4 服务
服务用于请求应答模型,也必须有一个唯一的名称。当一个节点提供某个服务时,所有的节点都可以通过使用ROS客户端所编写的代码与之通讯。
| rosservice 命令 | 作用 |
|---|---|
| rosservice args /service | 显示服务参数 |
| rosservice call /service | 用输入的参数请求服务 |
| rosservice find /service | 按照类型查找主题 |
| rosservice info /service | 显示指定服务的信息 |
| rosservice list | 显示活动的服务信息 |
| rosservice uri /service | 显示ROSRPC URI服务 |
| rosservice type /service | 显示服务类型 |
2.5 消息记录包
消息记录包是一种用于保存和回放ROS消息数据的文件格式,保存在.bag文件中。是一种用于存储数据的重要机制。
| rosbag命令 | 作用 |
|---|---|
| check | 确定一个包是否可以在当前系统中进行,或者是否可以迁移。 |
| decompress | 压缩一个或多个包文件。 |
| filter | 解压一个或多个包文件。 |
| fix | 在包文件中修复消息,以便在当前系统中播放。 |
| help | 获取相关命令指引帮助信息。 |
| info | 总结一个或多个包文件的内容。 |
| play | 以一种时间同步的方式回放一个或多个包文件的内容。 |
| record | 用指定话题的内容记录一个包文件。 |
| reindex | 重新索引一个或多个包文件。 |
2.6 参数服务器
参数服务器是可通过网络访问的共享的多变量字典,通过关键字存储在节点管理器上。
ROS 命令行工具rosparam:
| rosparam命令 | 作用 |
|---|---|
| rosparam delete parameter | 删除参数 |
| rosparam dump file | 将参数服务器中的参数写入到文件 |
| rosparam get parameter | 获得参数值 |
| rosparam list | 列出参数服务器中的参数 |
| rosparam load file | 从文件中加载参数到参数服务器 |
| rosparam set parameter value | 设置参数 |
2.7 节点管理器(Master)
节点管理器用于主题、服务名称的注册和查找等。在整个ROS系统中如果没有节点管理器,就不会有节点之间的通讯。
3,在虚拟机上创建一个基于ros的项目文件
3.1 项目文件结构
ROS的文件结构,并非每个文件夹都是必须的,根据业务需求设计。

打开虚拟机后,有时候提示网络激活失败,修复方法参考以下链接:
3.2、工作空间
工作空间就是管理和组织ROS工程项目文件的地方,直观的形容就是一个仓库,里面装载着ROS的各种项目工程,便于系统组织管理调用。在可视化图形界面里是一个文件夹。我们自己写的ROS代码通常就放在工作空间中。其下主要的一级目录有四个:
- src:源空间;ROS的catkin软件包(源代码包)
- build:编译空间;catkin(CMake)的缓存信息和中间文件
- devel:开发空间;生成的目标文件(包括头文件,动态链接库,静态链接库,可执行文件等)、环境变量
- install:安装空间
最顶层的工作空间(可以任意命名)和 src (必须为src)文件夹是需要自己创建;
- build 和 devel 文件夹由 catkin_make 命令自动创建;
- install 文件夹由 catkin_make install 命令自动创建,几乎不怎么使用,一般不创建。
注意:使用 catkin_make 编译之前一定要回到最顶层的工作空间。同一个工作空间下,不允许存在同名功能包;不同工作空间下,允许存在同名功能包。
mkdir -p ~/catkin_ws/src # 创建
cd catkin_ws/ # 进入工作空间
catkin_make # 编译
source devel/setup.bash # 更新工作空间环境3.3、package功能包
package是一种特定的文件结构和文件夹组合。通常将实现同一个具体功能的程序代码放到一个package中。只有 CMakeLists.txt 和 package.xml 是【必须】的,其余路径根据软件包是否需要来决定。
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg my_pkg rospy rosmsg roscpp

【rospy】、【rosmsg】、【roscpp】是依赖库,可根据业务需求添加,也可加其他的,创建时加上就不需要再配置,忘记添加需要自己配置。
文件结构:
|-- CMakeLists.txt # (必须)当前package的编译规则。通常需要为c++代码添加编译时的依赖,执行等操作。
|—— package.xml # (必须)package的描述信息。通常添加一些ros库的支持。
|—— include文件夹 # 存放c++ 头文件的
|—— config文件夹 # 存放参数配置文件
|—— launch文件夹 # 存放launch文件(.launch或.xml)
|—— meshes文件夹 # 存放机器人或仿真场景的3D模型(.sda, .stl, .dae等) ;
|—— urdf文件夹 # 存放机器人的模型描述(.urdf或.xacro) ;
|—— rviz文件夹 # rviz文件
|—— src文件夹 # c++源代码
|—— scripts文件夹 # 可执行脚本;例如shell脚本(.sh)、Python脚本(.py) ;
|—— srv文件夹 # 自定义service
|—— msg文件夹 # 自定义topic
|—— action文件夹 # 自定义action
3.4、CMakeLists.txt介绍
CMakeLists.txt原本是Cmake编译系统的规则文件,而Catkin编译系统基本沿用了CMake的编译风格,只是针对ROS工程添加了一些宏定义。所以在写法上,catkin的CMakeLists.txt与CMake的基本一致。
这个文件直接规定了这个package要依赖哪些package,要编译生成哪些目标,如何编译等等流程。所以CMakeLists.txt非常重要,它指定了由源码到目标文件的规则,catkin编译系统在工作时首先会找到每个package下的CMakeLists.txt,然后按照规则来编译构建。
CMakeLists.txt的基本语法都还是按照CMake,而Catkin在其中加入了少量的宏,总体的结构如下:
cmake_minimum_required() # 所需CMake版本
project() # 软件包名称
find_package() # 找到编译需要的其他CMake/Catkin package
catkin_python_setup() # 启用Python模块支持
add_message_files() # message生成器
add_service_files() # service生成器
add_action_files() # action生成器
generate_message() # 生成不同语言版本的msg/srv/action接口
catkin_package() # 生成当前package的cmake配置,供依赖本包的其他软件包调用
add_library() # 用来指定编译产生的库。默认的catkin编译产生共享库。
add_executable() # 生成可执行二进制文件
add_dependencies() # 定义目标文件依赖于其他目标文件,确保其他目标已被构建
target_link_libraries() # 指定可执行文件链接的库。这个要用在add_executable()后面。
catkin_add_gtest() # 测试建立
install() # 安装至本机根据上面的操作步骤操作后,生成的CMakeLists.txt文件的内容为:
cmake_minimum_required(VERSION 3.0.2)
project(my_pkg)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rosmsg
rospy
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# std_msgs # Or other packages containing msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_pkg
# CATKIN_DEPENDS roscpp rosmsg rospy
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/my_pkg.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/my_pkg_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_my_pkg.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
重要的语法使用说明:
1)catkin_package()
catkin_package()是一个catkin提供的CMake宏。这是为构建系统指定catkin特定信息所必需的,后者又用于生成pkg-config和CMake文件。
在使用add_library()或add_executable()声明任何目标之前,必须调用此函数。该函数有5个可选参数:
INCLUDE_DIRS- 包的导出包含路径LIBRARIES- 从项目导出的库CATKIN_DEPENDS- 该项目依赖的其他catkin项目DEPENDS- 该项目所依赖的非catkinCMake项目。CFG_EXTRAS- 其他配置选项
3.5 、package.xml介绍
该软件包清单是一个XML文件名为package.xml中必须包括与任何兼容包的根文件夹。package.xml也是一个catkin的package必备文件,它是这个软件包的描述文件,在较早的ROS版本(rosbuild编译系统)中,这个文件叫做manifest.xml,用于描述pacakge的基本信息。如果你在网上看到一些ROS项目里包含着manifest.xml,那么它多半是hydro版本之前的项目了。pacakge.xml包含了package的名称、版本号、内容描述、维护人员、软件许可、编译构建工具、编译依赖、运行依赖等信息。
package.xml文件build_depend必须包含 message_generation,run_depend必须包含 message_runtime。
<pacakge> # 根标记文件
<name> # 包名
<version> # 版本号
<description> # 内容描述
<maintainer> # 维护者
<license> # 软件许可证
<buildtool_depend> # 编译构建工具,通常为catkin
<depend> # 指定依赖项为编译、导出、运行需要的依赖,最常用
<build_depend> # 编译依赖项
<build_export_depend> # 导出依赖项
<exec_depend> # 运行依赖项
<test_depend> # 测试用例依赖项
<doc_depend> # 文档依赖项版权声明
本文为[YOULANSHENGMENG]所创,转载请带上原文链接,感谢
https://blog.csdn.net/YOULANSHENGMENG/article/details/124099558
边栏推荐
- bounding box iou
- 又一款数据分析神器:Polars 真的很强大
- Learn to C language fourth day
- Go language development Daily Fresh Project Day 3 Case - Press Release System II
- 如何发挥测试策略的指导性作用
- LeetCode-279-完全平方数
- 一些接地气的话儿
- The more you use the computer, the slower it will be? Recovery method of file accidental deletion
- Async function ------ ES6
- MySQL 存储过程和函数
猜你喜欢
Unity solves Z-fighting
![[matlab 2016 use mex command to find editor visual studio 2019]](/img/34/dd883f0ce4358234eb694287228687.png)
[matlab 2016 use mex command to find editor visual studio 2019]
Rust更适合经验较少的程序员?
常用60类图表使用场景、制作工具推荐
On the three paradigms of database design

Come in and teach you how to solve the problem of port occupation
亚马逊和Epic将入驻,微软应用商城向第三方开放

How to configure SSH public key in code cloud

Latex formula
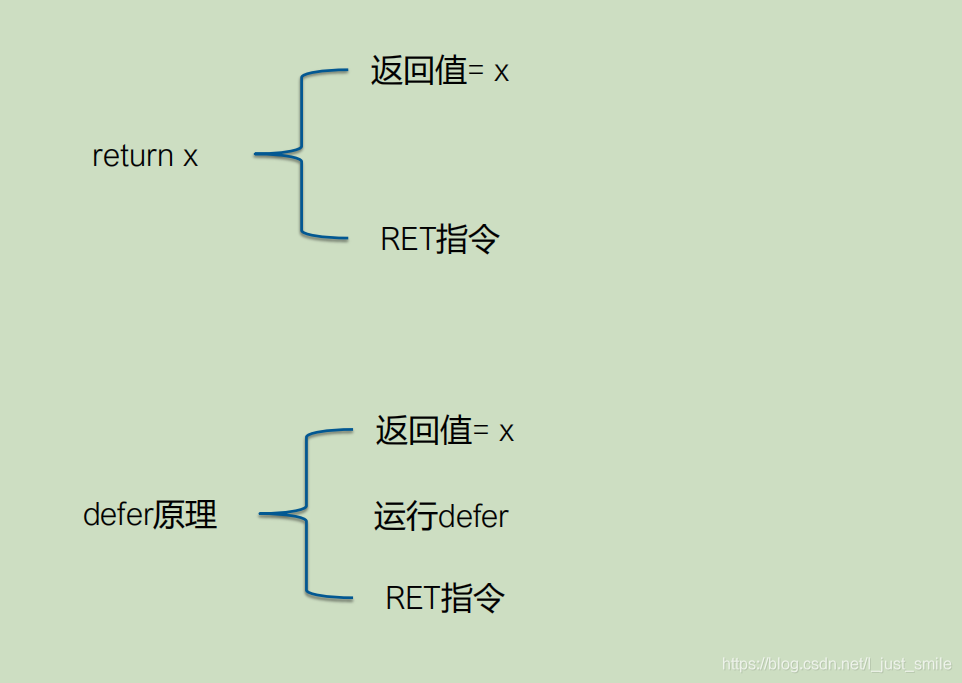
go defer
随机推荐
go slice
Send email to laravel
GO语言开发天天生鲜项目第三天 案例-新闻发布系统二
2021-09-02 unity project uses rider to build hot change project failure record of ilruntime
Elastic box model
An error occurs when the addressable assets system project is packaged. Runtimedata is null
go map
vulnhub DC:1渗透笔记
居家第二十三天的午饭
笔记本电脑卡顿怎么办?教你一键重装系统让电脑“复活”
Some grounded words
浅谈数据库设计之三大范式
韩国或将禁止苹果和谷歌向开发者抽佣 创全球首例
Go限制深度遍历目录下文件
Some thoughts on super in pytorch, combined with code
Vulnhub DC: 1 penetration notes
ros功能包内自定义消息引用失败
Go language development Daily Fresh Project Day 3 Case - Press Release System II
The problem of 1 pixel border on the mobile terminal
Go limit depth traversal of files in directory