当前位置:网站首页>Attitude solution - gyroscope + Euler method
Attitude solution - gyroscope + Euler method
2022-08-11 07:14:00 【KPer_Yang】
Table of Contents
3. Attitude solution by gyroscope + Euler angle method
Refer to the doctoral dissertation "Research on the Attitude and Navigation Information Fusion Algorithm of Multi-rotor UAV" Zhang Xin
1. Fundamentals
Attitude solution refers to finding the angle of rotation of the navigation coordinate system (generally the geographic coordinate system, represented by n) and the carrier coordinate system (represented by b) in three axes: pitch angle, roll angle and headinghorn.Use  respectively.Attitude solution is the application of Euler angle method and quaternion in navigation, and Euler angle method and quaternion method can be used to represent the rotation relationship between arbitrary coordinate systems, and the quaternion method has other more extensiveApplications.Generally, two combinations of gyroscope and accelerometer + magnetometer are used, and then Kalman filter (or an improved algorithm of Kalman filter, such as extended Kalman filter, unscented Kalman filter algorithm) is used for sensor fusion to obtain higher accuracy.The gyroscope has the characteristics of high short-term accuracy.However, it is greatly affected by carrier vibration and temperature drift, so there will be a large cumulative error for a long time.
respectively.Attitude solution is the application of Euler angle method and quaternion in navigation, and Euler angle method and quaternion method can be used to represent the rotation relationship between arbitrary coordinate systems, and the quaternion method has other more extensiveApplications.Generally, two combinations of gyroscope and accelerometer + magnetometer are used, and then Kalman filter (or an improved algorithm of Kalman filter, such as extended Kalman filter, unscented Kalman filter algorithm) is used for sensor fusion to obtain higher accuracy.The gyroscope has the characteristics of high short-term accuracy.However, it is greatly affected by carrier vibration and temperature drift, so there will be a large cumulative error for a long time.
2. Strapdown matrix
The strapdown matrix refers to the relationship matrix of the carrier coordinate system->geographical coordinate system conversion: the rotation axis is rotated in different orders to obtain different strapdown matrices, assuming that the order of the geographic coordinate system->carrier coordinate system follows

3. Gyro + Euler angle method attitude solution
Assume the order of geographic coordinate system -> carrier coordinate system is in accordance with  Order, then the angular rate vector of the carrier coordinate system relative to the geographic coordinate system:
Order, then the angular rate vector of the carrier coordinate system relative to the geographic coordinate system:

Therefore, the differential equation is obtained:

Use the first-order difference method to discretize and solve the attitude angle.But when  , denominator=0, which is EulerThe singularity of the angle cannot be measured at the full pose.
, denominator=0, which is EulerThe singularity of the angle cannot be measured at the full pose.
边栏推荐
猜你喜欢
随机推荐
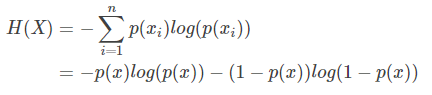
详解BLEU的原理和计算
《Show, Attend and Tell: Neural Image Caption Generation with Visual Attention》论文阅读(详细)
SATA、SAS、SSD三种硬盘存储性能数据
HCIP 重发布/路由策略实验
每日sql-员工奖金过滤和回答率排序第一
OA项目之待开会议&历史会议&所有会议
每日sql - 判断+聚合
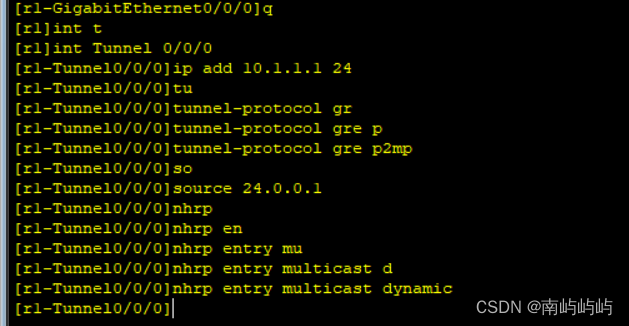
HCIP WPN实验
拼多多API接口(附上我的可用API)
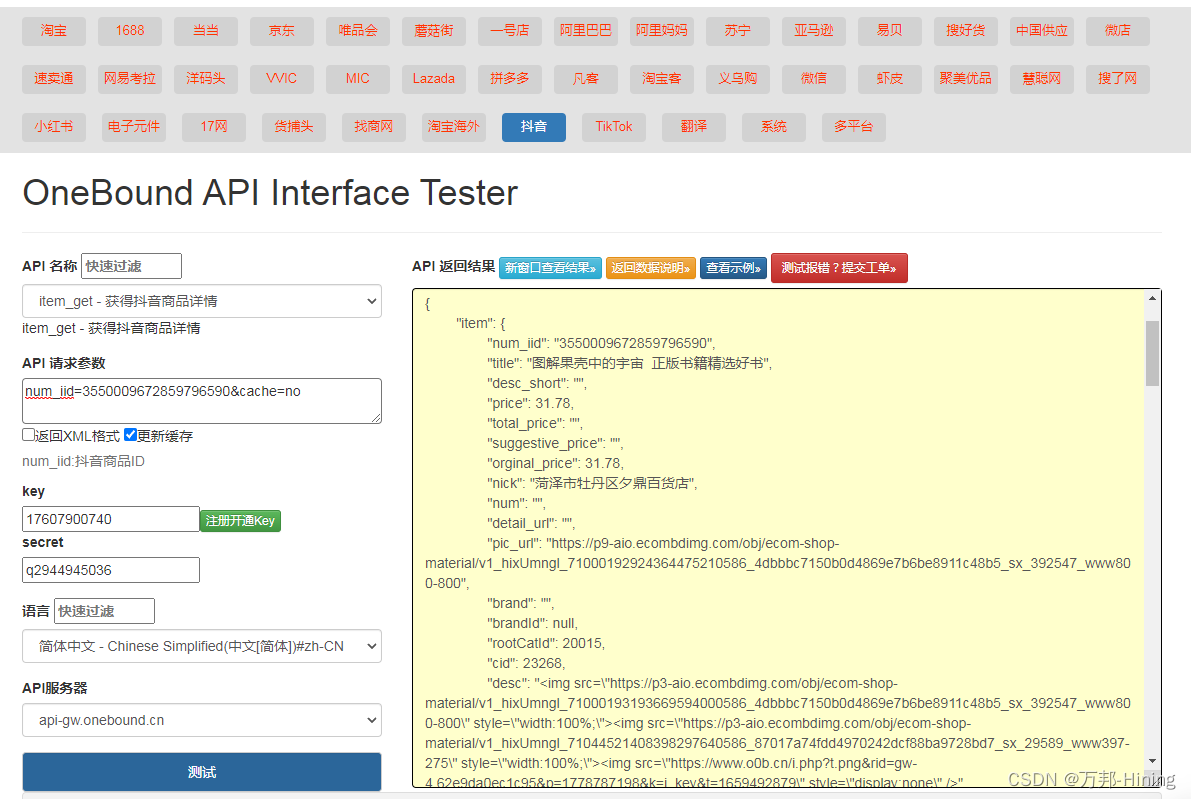
抖音API接口
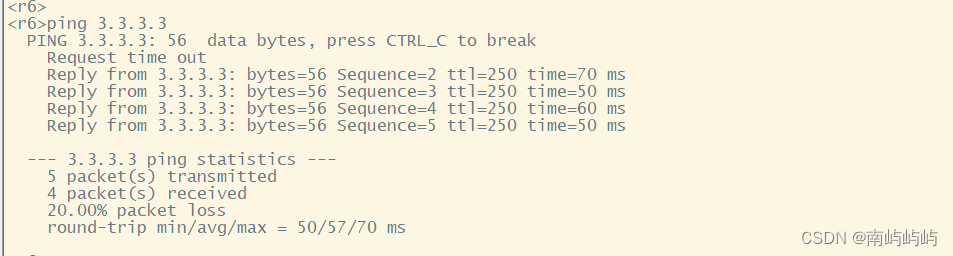
HCIP MGRE\OSPF综合实验
HCIP experiments (pap, chap, HDLC, MGRE, RIP)
HCIP BGP neighbor building, federation, and aggregation experiments
实现通用的、高性能排序和快排优化
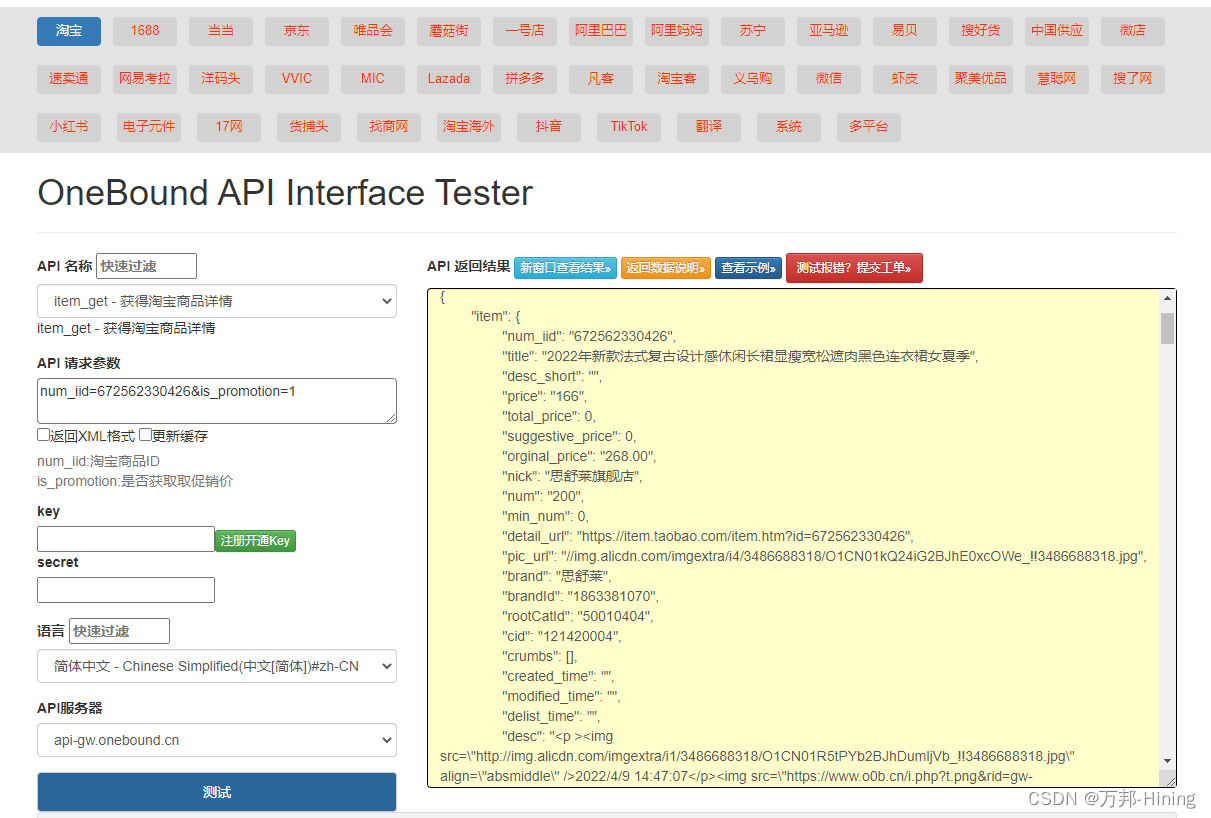
淘宝商品详情API接口
使用Keras构建GAN,以Mnist为例
Local yum source build
Raspberry Pi set static IP address
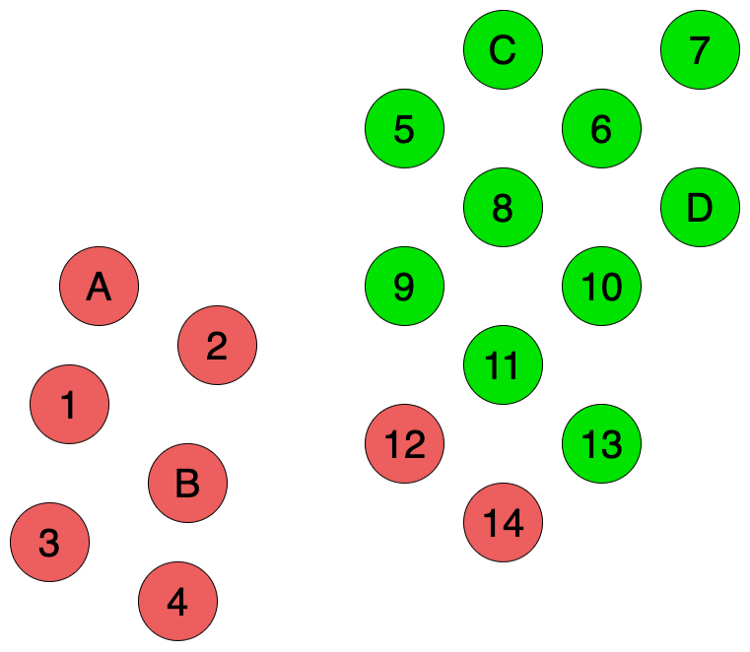
HCIP-Spanning Tree (802.1D, Standard Spanning Tree/802.1W: RSTP Rapid Spanning Tree/802.1S: MST Multiple Spanning Tree)
亚马逊获得AMAZON商品详情 API 返回值说明